一种场景自适应的轨道交通ATO控制系统
本技术涉及轨道交通,具体而言,涉及一种适用多场景的轨道交通ato控制系统。
背景技术:
1、城市轨道交通以其大运量、高效率、低污染等优势,迅速成为许多城市解决交通问题的首要选择。列车运行过程中,通过速度传感器获取轮对的速度传入列车atp/ato模块,将列车实际速度与列车目标速度对比,经由控制算法,实现对列车的牵引制动模块的控制,以保证列车按照既定目标速度运行,其中,atp模块负责列车的安全防护,ato模块进行列车在正常运行状态下的牵引制动过程。
2、ato,即automatic train operation,列车自动驾驶。图1示出了现有轨道交通ato控制系统示意图,包含运行信息获取模块、pid控制模块/滑模pid控制模块,以及列车牵引/制动执行模块。所述运行信息获取模块用于实时获取列车运行过程中的列车状态信息、目标曲线信息和线路条件信息;所述pid控制模块/滑模pid控制模块用于根据列车实时状态信息计算列车指令合适的指令加速度,并传输给列车牵引/制动执行模块;所述列车牵引/制动执行模块用于控制列车按加速度指令值运行。传统ato控制算法在获取列车运行信息后,仅通过滑模pid/pid控制模块和加速度指令控制模块对列车牵引/制动过程进行控制。
3、现有ato控制算法主要为pid控制算法与滑模pid控制算法。
4、列车的实际运行场景通常具有非线性、时变不确定性、强干扰等特性,应用常规pid控制器难以达到理想的控制效果;在实际运行过程中,pid控制器需要对相关参数进行调整以得到较好的控制效果,而参数整定方法繁杂,因此常规pid控制器往往性能欠佳。
5、滑模pid控制器是传统pid控制器的改进,可以在动态过程中根据系统当前的状态,有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动,可以综合考虑速度差和加速度差的变化精准控制列车沿目标速度曲线运行。滑模pid控制器的不足之处主要表现为以下两点:参数比pid控制器多两个,参数整定更加复杂和繁琐;在工况切换中容易发生超调。
6、ato控制器针对列车实际速度超出目标速度曲线的值设置了限制,当列车速度在0~13km/h时的超调量最大值约为1.2km/h,当列车速度在13km/h以上时,列车的超调量最大值为2~2.5km/h,超调量最大值的具体取值取决于不同的生产厂家的规定,如果列车在行驶过程中的超调量超过了最大超调量的阈值,则列车会自动实施紧急制动,影响运行效率。在考虑工况切换特性的情况下,列车仅使用pid控制器和滑模pid控制器时均会在工况切换时产生一定的超调量,且部分场景下会超出最大超调量的限制,进而触发列车的紧急制动,影响运行效率。
7、因此需要在原有列车控制系统基础上设计一种可适应多场景的新型的ato控制系统以抑制列车在工况切换时产生的超调量。
技术实现思路
1、本技术的目的是为了克服现有ato控制器存在工况切换情况下易超调的缺陷,公开一种场景自适应的轨道交通ato控制系统,能够满足列车ato控制器控制要求。应用时,场景包括轨道交通ato站间运行的静态目标曲线追踪场景和轨道交通ato站间运行中因临时制动需求而生成的站间动态停车目标曲线的追踪场景。
2、本技术的目的可以通过以下方案来实现:
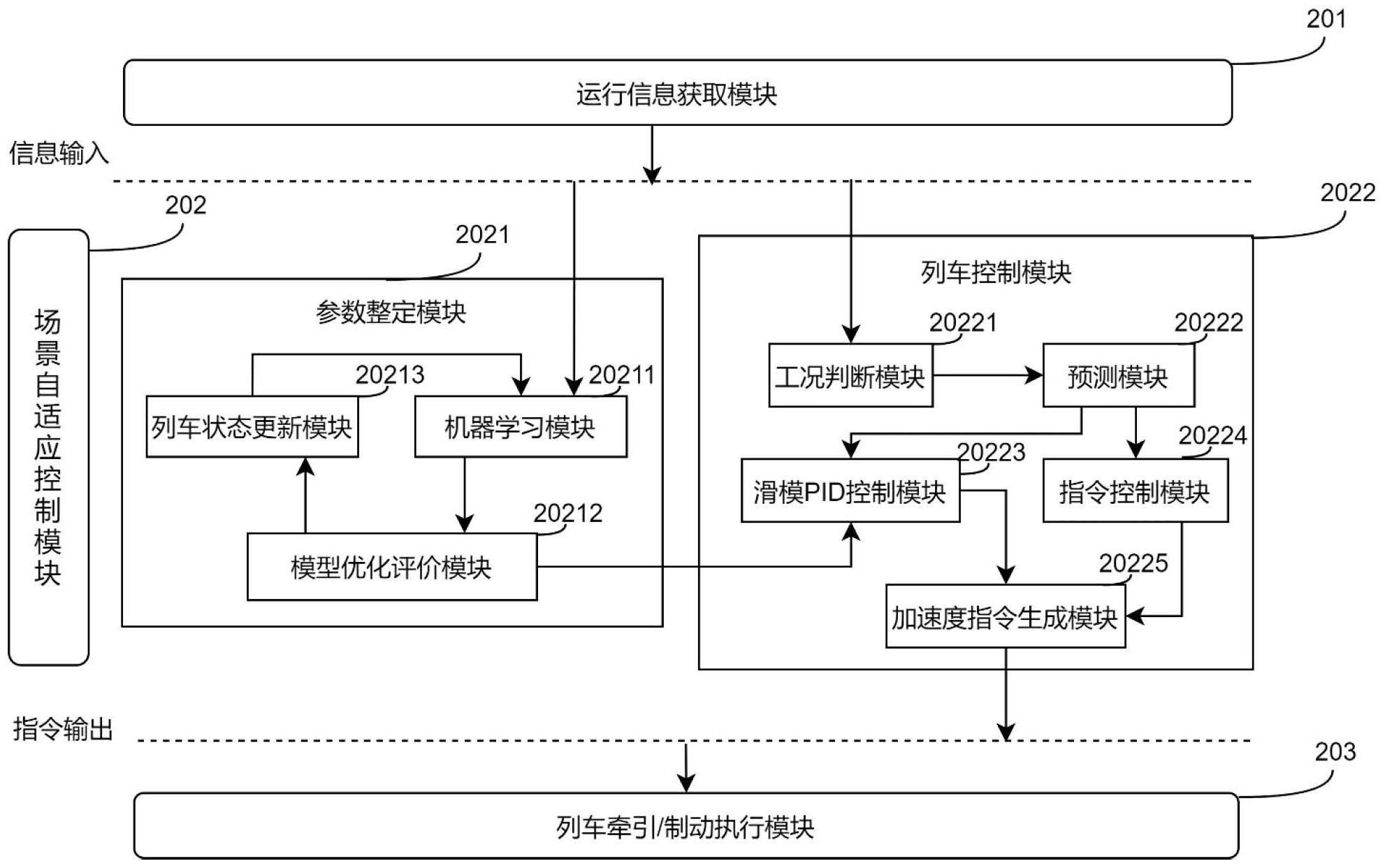
3、一种场景自适应的轨道交通ato控制系统,包括运行信息获取模块201、场景自适应控制模块202和列车牵引/制动执行模块203,所述场景自适应控制模块202接收运行信息获取模块201的信息输入,通过学习、预测和优化后形成控制指令输入给所述列车牵引/制动执行模块203。
4、所述场景自适应控制模块202包括参数整定模块2021和列车控制模块2022,所述参数整定模块2021包括机器学习模块20211、模型优化评价模块20212和列车状态更新模块20213,所述列车控制模块2022包括工况判断模块20221、预测模块20222、滑模pid控制模块20223、指令控制模块20224和加速度指令生成模块20225,其中:
5、所述机器学习模块20211用于在列车试运行过程中输入运行信息获取模块201的信息,在列车实际运行控制前,不断调整滑模pid控制模块的控制器参数以确定针对当前线路的最佳控制器参数值;
6、所述模型优化评价模块20212用于对于滑模pid控制模块20223不同的指标要求进行计算分析,判断机器学习模块20211的迭代次数,最终将结果输出到列车控制模块2022中;
7、所述列车状态更新模块20213用于将根据相关运行信息构建仿真场景,不断为机器学习模块20211提供输入参数,同时实现基于列车完整运行区间的参数优化目的;
8、所述工况判断模块20221,接收运行信息获取模块201的信息输入,用于实现对列车实时运行工况进行计算的功能,提供给预测模块20222;
9、所述预测模块20222用于实现对列车工况是否即将切换的判断功能以及实现列车在工况切换前计算可抑制列车速度产生超调的合适指令加速度值的功能,提供给滑模pid控制模块20223、指令控制模块20224;
10、所述滑模pid控制模块20223将输出的指令加速度值提供给加速度指令生成模块20225;
11、所述指令控制模块20224用于实现在列车工况发生切换时从所述预测模块20222传输所述预测模块20222生成的合适指令加速度值,提供给加速度指令生成模块20225;
12、所述加速度指令生成模块20225用于实现向所述列车牵引/制动执行模块203传输实时指令加速度值。
13、具体地,列车在同一个控制周期下,指令控制模块20224和滑模pid控制模块20223中只有一个模块会发送指令加速度,指令加速度的发送由预测模块20222决定;当预测模块20222预测到列车的工况即将发生切换,继续使用滑模pid控制模块20223发送的指令加速度会导致列车在工况切换时发生超调时,将会向指令控制模块20224提前发送工况切换后的目标曲线加速度值以抑制列车在即将到来的工况切换阶段发生速度超调,同时停止这一控制周期滑模pid控制模块对指令加速度的输出。
14、具体地,由加速度指令生成模块20225输出的指令加速度在传入列车牵引/制动执行模块203之前会经历一个加速度传输和响应的过程。
15、具体地,所述滑模pid控制模块包括滑模控制器和pid控制器,即滑模控制模型和pid模型;
16、神经网络控制算法,主要包括了滑模控制、pid控制、智能学习算法和仿真运行,运行于滑模pid控制模块和机器学习模块:
17、系统运行控制模型需要给定初始的速度增益参数kv、加速度增益参数ka、比例环节参数kp、积分环节参数ki、微分环节参数kd值,对滑模控制器和pid控制器进行初始化设置;
18、一、滑模控制部分包含的主要参数为kv与ka,当两个参数确定后,滑模控制模型的控制器即得到确定;
19、二、pid控制部分包含的主要参数为kp、ki、kd,当三个参数确定后,pid模型的控制器效果即得到确定;
20、三、智能学习算法部分:通过当前仿真结果中列车的仿真加速度和ato目标速度曲线中给定的目标加速度的差值,进行优化学习,对pid控制器中的kp、ki、kd值进行迭代;
21、四、系统运行控制模型需要提前读取已有的ato目标速度曲线数据、线路环境条件数据等,以支撑仿真运行部分;相关部分将根据当前列车的控制参数所对应的模型与线路、环境条件进行的运动学与动力学计算,更新列车的运行状态;当滑模控制器与pid控制器确定,则列车此刻的运行控制模型确定,通过仿真运行部分,实现列车的仿真计算和控制。
22、具体过程如下:
23、初始时刻,通过滑模控制器,输出由滑模控制器给出的控制加速度as1,和上一时刻受控列车的实际运行加速度acu,一并输入至pid控制器,经由pid控制得到新的控制加速度as2,将前后两个控制加速度进行加权,得到实际的输出指令加速度as;
24、经过线路条件和环境因素的线性叠加和对于受控列车非线性控制,得到列车实际的运行加速度acu,并代入下一阶段的闭环控制中;
25、此外,acu也将作为智能控制算法的输入,判断pid控制器的控制参数是否需要进行优化迭代,保证列车能够维持较好的运行效果;若ato目标速度曲线数据中的目标加速度atarget与实际运行加速度acu的偏差未超过设定阈值,直接转入下一时间窗口的计算;否则,在下一次控制前,需要先进行pid控制器的优化学习,生成一套全新的kp、ki、kd,以供后续的计算控制。
26、进一步地,神经网络的网络结构参数设置和迭代规则,如下:
27、选择构建4-5-3结构的bp神经网络,输入层的输入为pid控制器的三个指标kp、ki、kd以及常数项,输出层的输出则为新的pid控制器的指标值;隐含层的激活函数和输出层的激活函数分别为公式(1)与公式(2),公式(3)为性能指标参数计算方式,其中:
28、u(k)表示k时刻列车实际输出加速度;
29、acu表示列车的实际运行加速度:
30、atarget表示列车依照给定ato曲线所应达到的目标加速度;
31、e(k)表示k时刻选定的性能指标参数值;
32、
33、
34、
35、输出层连接权值更新方式分别为公式(4)与公式(5),隐含层连接权值更新方式分别为公式(6)与公式(7),其中
36、η表示模型学习速率;
37、α表示惯性系数;
38、为k时刻,隐含层第i个神经元的输出;
39、为k时刻,输出层第l个神经元的输出;
40、为k时刻,输出层第l个神经元的输入;
41、为k时刻,输入层第j个神经元的输出;
42、δωij2(k+1)为k+1时刻,输入层和隐含层的权值变化量;
43、δωli3(k+1)为k+1时刻,隐含层和输出层的权值变化量;
44、
45、
46、
47、
48、与现有技术相比,本技术具有以下优点:
49、本技术系统中参数整定模块对滑模pid控制器的五个控制器参数进行自整定,与手动参数整定相比具有更高的效率和精度并节省了更多列车试运行时控制器参数整定的时间。
50、申请中系统预测模块可以有效抑制列车在工况发生切换时容易产生过量超调的情况,避免了列车在运行过程中因超调量超过最大超调阈值触发的紧急制动,同时提高了列车ato控制器跟踪目标曲线的精度。
- 还没有人留言评论。精彩留言会获得点赞!