一种铁轨三维变形全场域自主感知装置及方法
本发明属于铁轨变形测量,具体说是一种铁轨三维变形全场域自主感知装置及方法。
背景技术:
1、
2、目前,铁轨轨道变形测量技术可以分为离散点式测量技术和连续变形场测量技术。以水准仪、经纬仪、测量机器人为代表的离散点式测量技术可以实现铁轨关键点变形的测量,然而测量结果受人为因素影响大,测量效率低,难以实现连续变形测量。连续变形场测量技术包括:线阵列ccd摄影测量技术、三维激光扫描技术和计算机视觉测量技术等。该类技术实现了铁轨整体形变状态的测量,但是测量结果受环境因素影响大,对于大范围铁轨变形测量需要较多的光学器件,测量成本高。
技术实现思路
1、针对上述现有技术中的缺陷与不足,本发明提供一种铁轨三维变形全场域自主感知装置及方法,利用u型支座将表面布设有应变传感器的感知链路安装在铁轨轨腰上,外界因素作用导致铁轨变形后,感知链路协同变形,通过重构感知链路的形态变化实现铁轨三维变形的全场域自主感知。
2、本发明为解决其技术问题所采用的技术方案是:
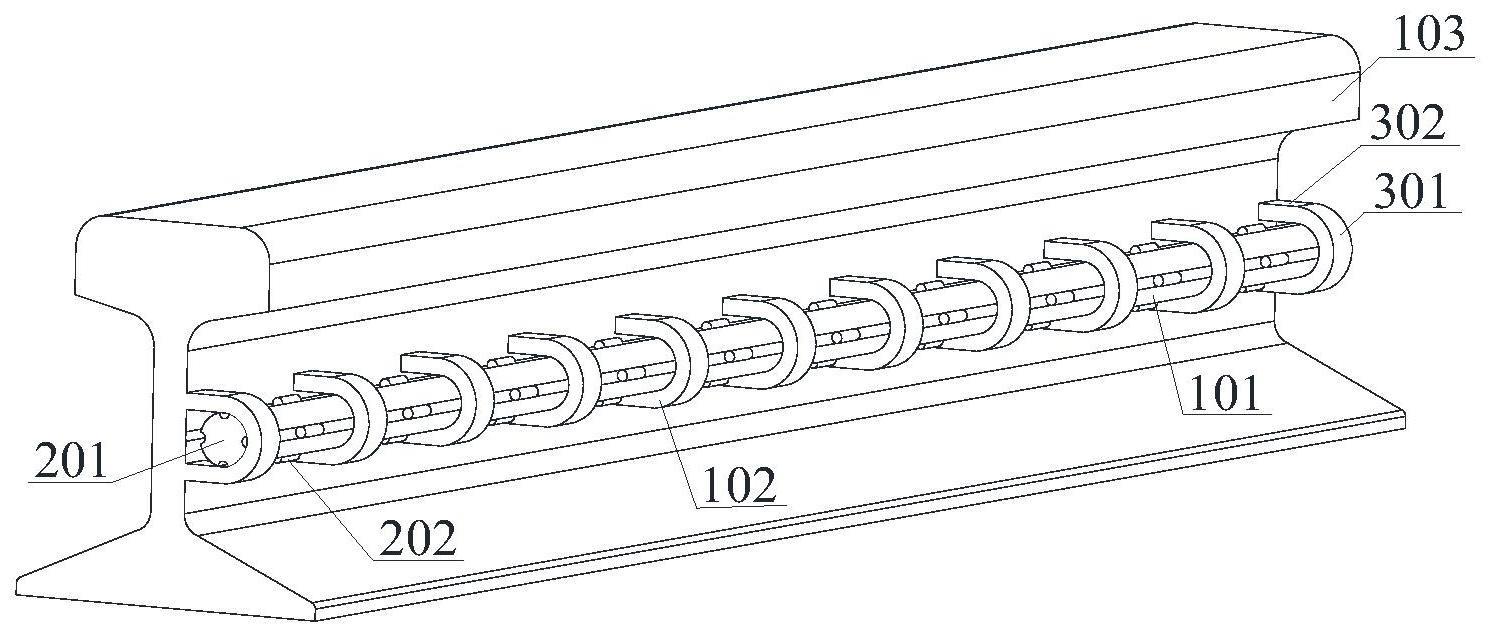
3、一种铁轨三维变形全场域自主感知装置,包括与待监测铁轨长度相同的感知链路和若干u型支座;所述感知链路包括弹簧钢棒和沿长度方向依次间隔地设于弹簧钢棒上的若干应变传感器组;若干u型支座依次间隔地布设于弹簧钢棒上,弹簧钢棒通过所述u型支座连接固定在铁轨轨腰上。
4、进一步的,所述弹簧钢棒外表面沿环向每隔90°设有一轴向通长设置的圆弧凹槽,每个应变传感器组包含沿环向依次间隔地安装在各圆弧凹槽内的四个应变传感器。
5、进一步的,所述u型支座包括与弹簧钢棒相装配的c型夹持构件和分设于夹持构件两端部的用以与铁轨轨腰相接的强力吸铁石。
6、一种铁轨三维变形全场域自主感知方法,使用上述的感知装置,包括如下步骤:
7、步骤1.建立空间直角坐标系x-y-z:沿感知链路长度方向建立x轴,沿感知链路同一测点处上下表面应变传感器中心连线方向建立y轴,根据右手法则建立z轴,坐标系原点位于感知链路左端截面中心处;
8、步骤2.沿感知链路长度方向布设n+1个u型支座,各个u型支座的位置为xi,i∈[1,n+1],相邻两个u型支座的距离为di=xi+1-xi;
9、步骤3.在相邻两个u型支座之间布设一应变传感器组,应变传感器组的布设位置表示为:
10、
11、其中,si为在xi和xi+1两个u型支座之间应变传感器组的布设位置,且d0=0;
12、步骤4.根据各应变传感器组的实测应变值,求解得到感知链路沿y轴和z轴方向的弯曲曲率实测值:
13、
14、
15、其中,cy(si)和cz(si)为应变传感器组布设位置si处感知链路沿y轴和z轴方向的弯曲曲率实测值;εj(si)为应变传感器组布设位置si处j号应变传感器的实测应变值;j代表应变传感器沿感知链路环向的布设位置,位于感知链路上表面的应变传感器编号为1,沿x轴到y轴的转动方向将其余应变传感器编号为2,3和4;r为弹簧钢棒的直径;
16、步骤5.根据感知链路沿y轴和z轴方向的弯曲曲率实测值,建立求解向量f:
17、f=[cy(s1)cz(s1)cy(s2)cz(s2)…cy(sn)cz(sn)]t;
18、步骤6.采用节点位移和插值函数求解得到si处感知链路沿y轴和z轴方向弯曲曲率理论值:
19、ky(si)=cy(ξi)ui
20、kz(si)=cz(ξi)ui
21、其中,ky(si)和kz(si)为应变传感器组布设位置si处感知链路沿y轴和z轴方向的弯曲曲率理论值;cy(ξi)和cz(ξi)为由插值函数c1(ξi)、c2(ξi)、c3(ξi)和c4(ξi)构成的向量;ui为单元节点位移向量;ξi为无量纲节点坐标;
22、步骤7.利用感知链路沿y轴和z轴方向弯曲曲率的理论值和实测值,建立变形求解目标函数:
23、
24、其中,φ(u)为变形求解目标函数;λ为惩罚系数;u为总体节点位移向量;c为由向量cy(ξi)和cz(ξi)组成的矩阵。
25、进一步的,步骤6中向量cy(ξi)和cz(ξi)表示为:
26、cy(ξi)=[c1(ξi) c2(ξi) 0 0 c3(ξi) c4(ξi) 0 0]
27、=[12ξi-6 (6ξi-4)di 0 0 6-12ξi (6ξi-2)di 0 0]
28、cz(ξ1)=[0 0 c1(ξ1) c2(ξ1) 0 0 c3(ξ1) c4(ξ1)]
29、=[0 0 12ξi-6 (6ξi-4)di 0 0 6-12ξi (6ξi-2)di]。
30、进一步的,步骤6中单元节点位移向量ui表示为:
31、ui=[vi v′i wi w′i vi+1 v′i+1 wi+1 w′i+1]t
32、其中,vi和wi为u型支座布设位置xi处沿y轴和z轴方向的变形,v′i和w′i为vi和wi对x求一阶导数。
33、进一步的,步骤7中矩阵c表示为:
34、
35、进一步的,步骤7中总体节点位移向量u表示为:
36、u=[v1 v′1 w1 w′1 … vn+1 v′n+1 wn+1 w′n+1]t。
37、进一步的,无量纲节点坐标ξi与坐标xi的关系为:
38、
39、本发明由于采用以上技术方案,能够取得如下的有益效果:
40、本申请涉及一种铁轨三维变形全场域自主感知装置及方法,其主要创新点在于利用u型支座将表面布设有应变传感器的感知链路安装在铁轨轨腰上,并通过重构感知链路的形态变化实现铁轨三维变形的全场域自主感知。该装置能够实现铁轨三维变形的远程实时监测,监测频率可根据实际需要确定,最高可达1khz。同时,该装置能够准确重构铁轨沿长度方向各点三维变形量,空间分辨率可达1m,测量精度可达亚毫米级。
41、与传统的铁路监测装置相比,本申请所提出的铁轨三维变形全场域自主感知装置及方法具有多个优势。首先,该装置不需要基准参考点,只需通过强力吸铁石与铁轨进行简单连接,操作简便,可以实现不同工况下铁轨三维变形的无损测量。其次,该装置具有实时性好的特点,能够快速反映铁路变形状态,帮助铁路管理部门及时发现和解决铁路安全隐患。最后,该装置受环境因素影响小,能够适应各种恶劣的天气和环境条件,保证了监测数据的准确性和可靠性。
42、综上所述,本申请提出的铁轨三维变形全场域自主感知装置及方法具有广泛的应用前景,能够有效地提高铁路运行的安全性和稳定性,对于铁路的安全运营具有重要的意义。
技术特征:
1.一种铁轨三维变形全场域自主感知装置,其特征在于,包括与待监测铁轨长度相同的感知链路(101)和若干u型支座(102);所述感知链路(101)包括弹簧钢棒(201)和沿长度方向依次间隔地设于弹簧钢棒(201)上的若干应变传感器组;若干u型支座(102)依次间隔地布设于弹簧钢棒(201)上,弹簧钢棒(201)通过所述u型支座(102)连接固定在铁轨轨腰(103)上。
2.根据权利要求1所述的一种铁轨三维变形全场域自主感知装置,其特征在于,所述弹簧钢棒(201)外表面沿环向每隔90°设有一轴向通长设置的圆弧凹槽,每个应变传感器组包含沿环向依次间隔地安装在各圆弧凹槽内的四个应变传感器(202)。
3.根据权利要求1所述的一种铁轨三维变形全场域自主感知装置,其特征在于,所述u型支座(102)包括与弹簧钢棒(201)相装配的c型夹持构件(301)和分设于夹持构件(301)两端部的用以与铁轨轨腰(103)相接的强力吸铁石(302)。
4.一种铁轨三维变形全场域自主感知方法,使用权利要求1-3任一项所述的感知装置,其特征在于,包括如下步骤:
5.根据权利要求4所述的一种铁轨三维变形全场域自主感知方法,其特征在于,步骤6中向量cy(ξi)和cz(ξi)表示为:
6.根据权利要求5所述的一种铁轨三维变形全场域自主感知方法,其特征在于,步骤6中单元节点位移向量ui表示为:
7.根据权利要求6所述的一种铁轨三维变形全场域自主感知方法,其特征在于,步骤7中矩阵c表示为:
8.根据权利要求7所述的一种铁轨三维变形全场域自主感知方法,其特征在于,步骤7中总体节点位移向量u表示为:
9.根据权利要求4-8任一项所述的一种铁轨三维变形全场域自主感知方法,其特征在于,无量纲节点坐标ξi与坐标xi的关系为:
技术总结
本发明提供一种铁轨三维变形全场域自主感知装置及方法,装置包括与待监测铁轨长度相同的感知链路和若干U型支座;所述感知链路包括弹簧钢棒和沿长度方向依次间隔地设于弹簧钢棒上的若干应变传感器组;若干U型支座依次间隔地布设于弹簧钢棒上,弹簧钢棒通过所述U型支座连接固定在铁轨轨腰上。外界因素作用导致铁轨变形后,感知单元协同变形,利用应变传感器捕获弹簧钢棒表面应变变化,结合感知方法,实现铁轨三维变形的全场域自主感知。本发明所提出的铁轨三维变形全场域自主感知装置及方法具有实时性好、受环境因素影响小、无需基准参考点等优点。
技术研发人员:尤润州,任亮
受保护的技术使用者:大连理工大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!