一种复杂路况的列车自动驾驶虚拟曲线的生成方法
本发明涉及自动驾驶领域,尤其涉及一种复杂路况的列车自动驾驶虚拟曲线的生成方法。
背景技术:
1、近几十年来,随着通信、控制和计算机技术的发展,列车自动驾驶(ato)被认为是一种具有广阔发展前景的新兴技术。目前,这项重要技术已广泛应用于许多新建城市轨道交通线路。尽管ato通过自动对列车的加速、惰行和制动指令做出实时决策,提高了地铁交通运行的效率。但是在目前的研究中,列车自动驾驶严重依赖于实际数据,并且这些数据相对同质,不容易扩展,采集方法复杂且成本高昂。
2、虽然实际数据更接近实际,但以前的采样过程往往耗时长、成本高且难以消除错误。此外,实际数据依赖于真实的地铁运营,无法观察到现有运营场景的可行替代方案。为了实现地铁列车的自动驾驶,需要学习更可行的驾驶场景,以满足不同路段或路况的紧急情况。此外,还需要超越现有运营框架的限制,实现地铁列车的自动驾驶。
技术实现思路
1、本发明的目的在于提供一种复杂路况的列车自动驾驶虚拟曲线的生成方法,提供大量驾驶曲线,且驾驶曲线精度较高。
2、本发明采用的技术方案是:
3、一种复杂路况的列车自动驾驶虚拟曲线的生成方法,其包括以下步骤:
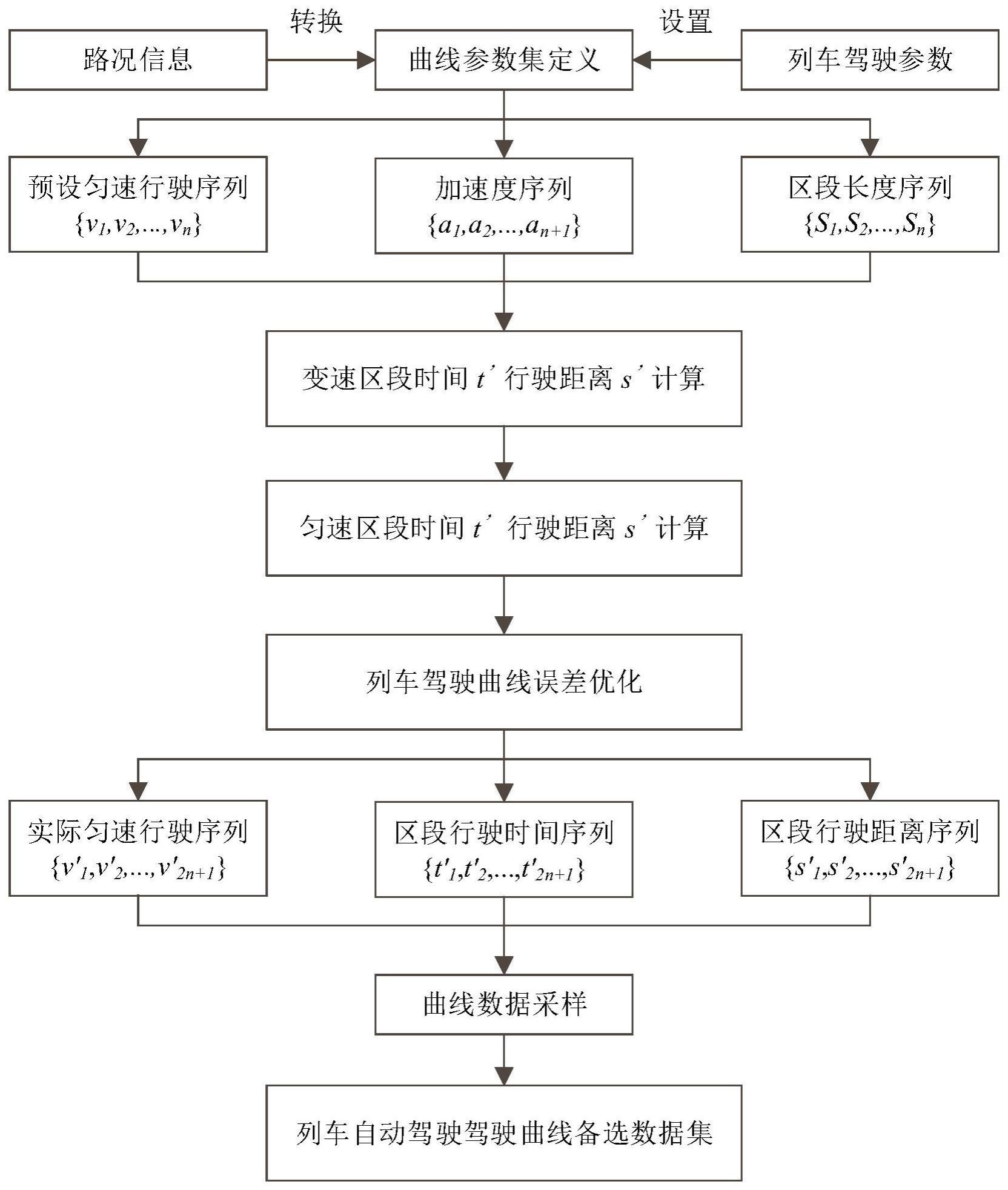
4、s1、获取列车规划路径信息获取相邻站点之间的路段;相邻站点之间的路段根据驾驶需求分为n个匀速行驶区段,并结合路段实际情况为每一段均匀行驶区段进行距离赋值得到区段长度序列{s1,s2,...,sn};
5、s2、按照区段的驾驶需求生成对应的区段列车驾驶速度序列{v1,v2,...,vn};vi表示第i个区段内列车驾驶速度的所有可行取值;即vi为集合由多个元素构成,表示列车在此区段内,列车驾驶速度有多种方案可供选择;
6、s3、每个匀速行驶区段的前段具有一个变速区段,最后一个匀速行驶区段的后段具有一个变速区段,为列车的每次变速过程提供多种加速度方案得到对应区段内加速度序列{a1,a2,...,an+1};ai为第i个变速区段的加速度集合且由多个元素构成,表示列车在每次变速过程中有多种加速度方案可供选择;
7、s4、对区段列车驾驶速度序列{v1,v2,...,vn}和区段内加速度序列{a1,a2,...,an+1}中的所有组合方案进行遍历,得到每一区段分配速度序列{v1,v2,...,vn}和加速度{a1,a2,...,an+1}序列,以形成曲线参数数据集;
8、s5、基于区段长度序列{s1,s2,...,sn}计算并调整每一个匀速行驶区段的列车匀速行驶时间以及对应的变速过程时间,进而得到初始驾驶曲线;
9、s6、计算并且获取由于调整时间带来的距离计算误差,并优化补偿距离计算误差后形成实际驾驶曲线。
10、进一步地,步骤s1中匀速行驶区段数目n的取值为大于1的正整数。可选的,n取值为3、4或5。
11、进一步地,步骤s2中驾驶需求可以是专家的驾驶经验,或者基于采集历史驾驶数据分类总结的数据。
12、进一步地,当n为奇数时,步骤s3中以中间的匀速行驶区段为界分为前区和后区,位于前区的变速区段均为加速区段,位于后区的变速区段均为减速区段。
13、进一步地,加速区段和减速区段数量相同。
14、进一步地,步骤s5的具体步骤如下:
15、s51,对每一个变速过程的时间进行调整,保证每一个时间点都能够被采样到,得到变速时间调整公式如下:
16、
17、其中,f()表示临近取整数;t0表示数据采样的时间间隔,t0为常量;i表示第i个匀速行驶区间,且1≤i≤n,n为匀速行驶区段数;vi表示第i段匀速行驶区段的分配速度,v′i-1表示第i-1匀速行驶区间的实际速度,ai表示第i段匀速行驶区段的前段变速区段的加速度;v′n表示第n段匀速行驶区段(即最后一段匀速行驶区段)的实际速度;t′2n+1表示第n段匀速行驶区段(即最后一段匀速行驶区段)的后段变速区段的变速时间;an+1表示第n段匀速行驶区段(即最后一段匀速行驶区段)的后段变速区段的加速度。
18、s52,基于变速过程时间计算对应的列车的变速后匀速驾驶速度,对应的计算公式如下;
19、v′i=v′i-1+ait′2i-1
20、s53,基于变速过程时间和变速后匀速驾驶速度,计算变速时间内列车驾驶距离,对应的计算公式如下;
21、
22、其中,s′2i-1表示第i段匀速行驶区段的前段变速区段的距离;t′2i-1表示第i段匀速行驶区段的前段变速区段的变速时间,s′2n+1表示最后一段匀速行驶区段的后段变速区段的距离;t′2n+1表示第n段匀速行驶区段(即最后一段匀速行驶区段)的后段变速区段的变速时间。
23、进一步地,步骤s51中v′0=0表示初始实际速度。
24、进一步地,步骤s6的具体步骤如下:
25、s61,计算调整时间带来的距离计算误差:
26、其中,si表示第i个匀速行驶区段实际的区段长度,s′j表示依次计算得到的第j个驾驶距离,s′j包括计算得到的对应匀速行驶区段的变速驾驶距离和匀速驾驶距离;
27、s62,取所有匀速行驶过程中速度最小的区段:v′k=v′min=min{v′1,v′2,...,v′n},并由行驶速度最小的驾驶区段来分担误差:计算对应的驾驶距离
28、其中,f()表示临近取整数;t0表示数据采样的时间间隔,t0为常量;serror为距离误差;v′k为调整后的速度;t′2k为调整后的匀速行驶时间;s′2k为调整后的匀速段行驶距离;k对应于v′min在{v′1,v′2,...,v′n}序列中的标号;
29、s63,更新替换速度最小的区段的数值得到优化后的行驶区段的实际匀速驾驶速度序列{v′1,v′2,...,v′n}、行驶时间序列{t′1,t′2,...,t′2n+1}和行驶距离序列{s′1,s′2,...,s′2n+1}。
30、进一步地,步骤s6中将实际驾驶曲线作为列车自动驾驶曲线备选数据。
31、本发明采用以上技术方案,基于地铁列车行驶的一般原理结合实际路段路况信息,生成的地铁列车驾驶曲线覆盖了地铁列车所有可行的驾驶方案,同一时间段内有大量驾驶曲线可提供筛选,同时驾驶曲线精度较高,能够为后续地铁自动驾驶的研究提供优质数据范本,实现地铁列车的自动驾驶。
技术特征:
1.一种复杂路况的列车自动驾驶虚拟曲线的生成方法,其特征在于:其包括以下步骤:
2.根据权利要求1所述的一种复杂路况的列车自动驾驶虚拟曲线的生成方法,其特征在于:步骤s1中匀速行驶区段数目n的取值为大于1的正整数。
3.根据权利要求1所述的一种复杂路况的列车自动驾驶虚拟曲线的生成方法,其特征在于:步骤s2中驾驶需求是基于专家的驾驶经验或者基于采集历史驾驶数据分类总结的数据。
4.根据权利要求1所述的-种复杂路况的列车自动驾驶虚拟曲线的生成方法,其特征在于:当n为奇数时,步骤s3中以中间的匀速行驶区段为界分为前区和后区,位于前区的变速区段均为加速区段,位于后区的变速区段均为减速区段。
5.根据权利要求4所述的一种复杂路况的列车自动驾驶虚拟曲线的生成方法,其特征在于:加速区段和减速区段数量相同。
6.根据权利要求1所述的-种复杂路况的列车自动驾驶虚拟曲线的生成方法,其特征在于:步骤s5的具体步骤如下:
7.根据权利要求6所述的一种复杂路况的列车自动驾驶虚拟曲线的生成方法,其特征在于:步骤s51中v′0=0表示初始实际速度。
8.根据权利要求6所述的一种复杂路况的列车自动驾驶虚拟曲线的生成方法,其特征在于:步骤s6的具体步骤如下:
9.根据权利要求1所述的一种复杂路况的列车自动驾驶虚拟曲线的生成方法,其特征在于:
技术总结
本发明公开一种复杂路况的列车自动驾驶虚拟曲线的生成方法,对路段进行数字化处理以将路段划分为若干行驶区段,根据路段实际情况对区段长度序列进行赋值。每一个区段按照区段的驾驶需求生成区段列车驾驶速度序列。基于区间内列车行驶不同速度的要求,设定并提供区段内加速度序列每次变速过程中有多种加速度方案可供选择。对列车驾驶速度序列和加速度序列的所有组合方案进行遍历,重新分配每一区段的分配速度序列和加速度序列,形成曲线参数数据集。计算并调整每一个匀速行驶区段的列车匀速行驶时间以及对应的变速过程时间,进而得到初始驾驶曲线;优化补偿距离计算误差后形成实际驾驶曲线。本发明的方法能够为列车驾驶提供更多的驾驶方案选择。
技术研发人员:陈德旺,赵文迪
受保护的技术使用者:福建工程学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!