一种基于光电传感器的斜井防跑车门栏控制方法及系统与流程
本发明属于矿井设备,尤其涉及一种基于光电传感器的斜井防跑车门栏控制方法及系统。
背景技术:
1、目前,现有技术通常使用编码器来计算矿车钩头的位置,该编码器安装在齿轮箱主轴上。然而,这种方法存在以下弊端:第一,由于编码器会不可避免地累积误差,因此需要经常进行深度校正以确保准确性。第二,编码器仅能计算钩头所处的位置,而实际矿车的长度会因携带的矿车数量而变化,从而导致矿车头尾与门栏的距离也会随之变化。为了避免矿车与门栏发生撞击,需要在开关门时增加额外的提前量,但这样会导致控制盲区过大。因此,这种方法的准确性和实用性存在一定局限性。现有技术控制盲区过大,重复精度不高,且控制过程繁琐。
2、这个问题可能会对矿车的运行造成多种影响。首先,由于编码器存在累积误差,并且需要经常进行深度校正,矿车的位置可能会出现偏差,导致运行不稳定或者不准确。其次,因为编码器只能计算钩头所处的位置,而无法考虑矿车头尾与门栏的距离,因此在开关门时可能需要加大提前量,导致控制盲区过大,进而增加矿车与门栏发生撞击的风险。此外,如果矿车长度变化较大,可能会导致矿车与轨道之间的间距也发生变化,进而影响矿车的稳定性和安全性。因此,解决这个问题对于保障矿车的正常运行和安全十分重要。
技术实现思路
1、针对现有技术存在的问题,本发明提供了一种基于光电传感器的斜井防跑车门栏控制方法及系统。
2、本发明是这样实现的,一种基于光电传感器的斜井防跑车门栏控制方法,所述基于光电传感器的斜井防跑车门栏控制方法包括:
3、状态检测组件利用光电传感器检测矿车通过的时刻以及通过时的速度,并向微处理器反馈检测信号;
4、微处理器根据检测信号判断矿车为上行或下行;同时微处理器结合检测信号与计时结果判断矿车是否为正常运行的矿车;
5、微处理器基于矿车上行或下行的判断结果以及是否正常运行的判断结果发出门栏控制指令。
6、进一步,所述基于光电传感器的斜井防跑车门栏控制方法包括以下步骤:
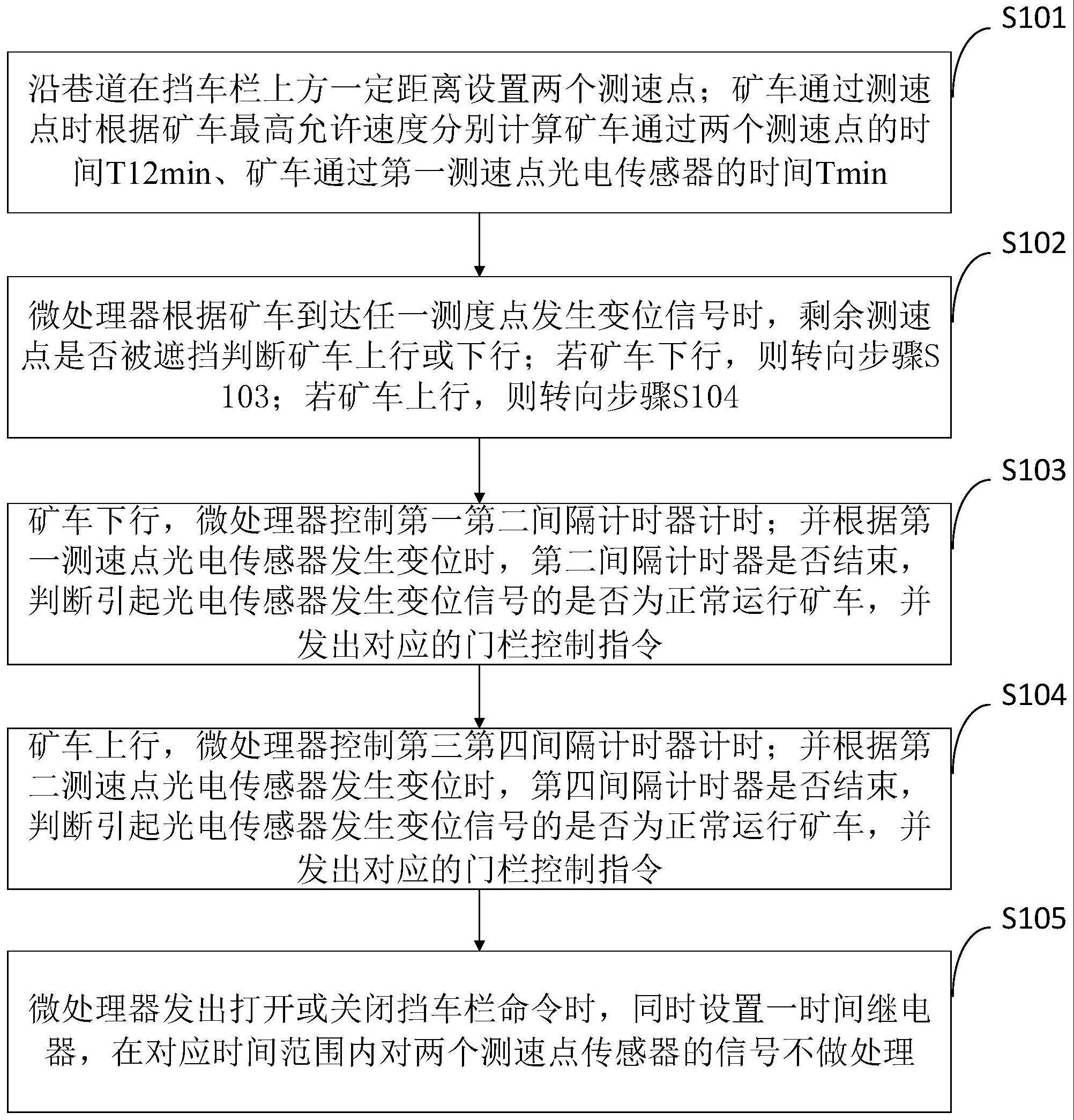
7、步骤一,沿巷道在挡车栏上方一定距离设置两个测速点;矿车通过测速点时根据矿车最高允许速度分别计算矿车通过两个测速点的时间t12min、矿车通过第一测速点光电传感器的时间tmin;
8、步骤二,微处理器根据矿车到达任一测度点发生变位信号时,剩余测速点光电传感器是否被遮挡判断矿车上行或下行;若矿车下行,则转向步骤三;若矿车上行,则转向步骤四;
9、步骤三,矿车下行,微处理器控制第一第二间隔计时器计时;并根据第一测速点光电传感器发生变位时,第二间隔计时器是否结束,判断引起光电传感器发生变位信号的是否为正常运行矿车,并发出对应的门栏控制指令;当判定为正常速度运行的矿车时,检测到第一节矿车头部到达第二测速点传感器时,微处理器发出开门指令。
10、步骤四,矿车上行,微处理器控制第三第四间隔计时器计时;并根据第二测速点光电传感器发生变位时,第四间隔计时器是否结束,判断引起光电传感器发生变位信号的是否为正常运行矿车,并发出对应的门栏控制指令;当判定为正常速度运行的矿车时,检测到最后一节矿车尾部通过第一测速点传感器后,微处理器发出关门指令。
11、步骤五,微处理器发出打开或关闭挡车栏命令时,同时设置一时间继电器,在对应时间范围内对两个测速点传感器的信号不做处理。
12、进一步,所述每个测速点由一组光电传感器构成;所述两个测速点的距离要小于最短矿车长度;当矿车处于两个测速点之间时,两个光电传感器可同时都被遮挡住,矿车通过测速点传感器时,测速点传感器被遮挡长度大于两个测速点之间的距离。
13、进一步,所述两个测速点之间的距离要大于两节矿车之间空隙的距离,这样便于微处理器准确捕捉最后一节矿车尾部通过光电传感器的时刻。
14、进一步,所述微处理器根据矿车到达任一测度点发生变位信号时,剩余测速点光电传感器是否被遮挡判断矿车上行或下行包括:
15、当矿车到达第一测速点第一组光电传感器发生变位信号时,第二测速点光电传感器未被遮挡,判断矿车下行,微处理器将矿车下行标志置位;
16、矿车到达第二测速点第二组光电传感器发生变位信号时,第一测速点光电传感器未被遮挡,视为矿车上行,微处理器将矿车上行标志置位。
17、进一步,所述微处理器控制第一第二间隔计时器计时包括:启动第一第二两个间隔计时器,第一间隔计时器在第一节矿车尾部通过第一测速点光电传感器时停止计时,第二间隔计时器在第一节矿车头部到达第二个测速点,第二个测速点光电传感器发生变位时停止计时;
18、所述微处理器控制第三第四间隔计时器计时包括:第三间隔计时器在第一节矿车尾部通过第二测速点光电传感器时停止计时,第四间隔计时器在第一节矿车头部到达第一个测速点,第一个测速点光电传感器发生变位时停止计时。
19、进一步,所述根据第一测速点光电传感器发生变位时,第二间隔计时器是否结束,判断引起光电传感器发生变位信号的是否为正常运行矿车,并发出对应的门栏控制指令包括:
20、当矿车下行标志=1,矿车继续运行,第一测速点光电传感器发生变位时,第二间隔计时器还未结束,则微处理器判断引起光电传感器发生变位信号的并非正常运行矿车,不处理所述变位信号,并复位相关标志;所述第一测速点光电传感器发生变位时,第二间隔计时器还未结束为t1<tmin、t1<t2;
21、当矿车下行标志=1,第一节矿车尾部通过第一测速点、第一测速点光电传感器发生变位时,第二间隔计时器已结束,且t1>=tmin、t1>t2、t2>=t12min时,则判断矿车以允许范围内的速度运行,并发出打开挡车栏命令指令。
22、进一步,所述根据第二测速点光电传感器发生变位时,第四间隔计时器是否结束,判断引起光电传感器发生变位信号的是否为正常运行矿车,并发出对应的门栏控制指令包括:
23、矿车上行标志=1,矿车继续运行,第二测速点光电传感器发生变位时,第四间隔计时器还未结束,则微处理器判断所述变位信号系非正常运行矿车所产生的信号,不对所述变位信号进行处理,并复位相关标志;所述第二测速点光电传感器发生变位时,第四间隔计时器还未结束为t3<tmin、t3<t4;
24、矿车上行标志=1,第一节矿车尾部通过第二测速点、第二测速点光电传感器发生变位时,第四间隔计时器已结束,判定矿车以允许范围内的速度运行,等最后一节矿车尾部通过第一测速点即可发出关闭挡车栏命令指令;所述第一节矿车尾部通过第二测速点、第二测速点光电传感器发生变位时,第四间隔计时器已结束为t3>=tmin、t3>t4、t4>=t12min。
25、所述最后一节矿车尾部通过第一测速点是指第一测速点光电传感器向下变位时第二测速点光电传感器已经处于向下变位状态。
26、本发明的另一目的在于提供一种实施所述基于光电传感器的斜井防跑车门栏控制方法的基于光电传感器的斜井防跑车门栏控制系统,所述基于光电传感器的斜井防跑车门栏控制系统包括:
27、状态检测组件,与微处理器连接;用于利用两组光电传感器检测矿车速度及位置;
28、微处理器,与状态检测组件连接;用于根据检测信号判断矿车为上行或下行;用于结合检测信号与计时结果判断矿车是否为正常运行的矿车;同时用于基于矿车上行或下行的判断结果以及是否正常运行的判断结果发出门栏控制指令;
29、所述两组光电传感器设置于两个测速点处;所述两个测速点沿巷道设置于挡车栏上方一定距离处。
30、本发明的另一目的在于提供一种计算机设备或可编程控制器,所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行所述基于光电传感器的斜井防跑车门栏控制方法的步骤。
31、本发明的另一目的在于提供一种信息数据处理终端,所述信息数据处理终端用于实现所述基于光电传感器的斜井防跑车门栏控制方法。
32、结合上述的技术方案和解决的技术问题,本发明所要保护的技术方案所具备的优点及积极效果为:
33、1、本发明直接采用检测组件控制门栏打开和关闭,重复精度高,而且控制盲区在合适范围之内。
34、2、本发明采用光电传感器对矿车通过两组光电传感器的时刻进行检测,并采用独有算法对矿车头尾进行精确检测,斜井跑车门栏开门采用矿车头部,关门捕捉最后一节矿车尾部,解决了开关门距离与携带矿车数量无关的难题,并填补国内外业内技术空白。
35、3、本发明的技术方案解决了斜井跑车防护装置控制盲区过大的技术难题,将现有控制盲区从40~50米降到20米左右。
36、4.提高了矿车通过斜井防跑车门栏的安全性:通过光电传感器对矿车通过时刻和速度的检测,微处理器能够判断矿车的运行情况,从而有效地控制门栏的开闭,确保只有正常运行的矿车才能通过。
37、5.提高了矿井的生产效率:传统的斜井防跑车门栏控制方法需要人工操作,效率低下,而这种基于光电传感器的方法实现了自动化控制,可以大大提高矿井的生产效率。
38、6.降低了人工操作的风险:传统的斜井防跑车门栏需要人工操作,存在人为操作失误和危险的风险,而这种基于光电传感器的方法可以减少人工操作,降低了操作风险。
39、7.可以实现实时监测和记录:通过光电传感器检测矿车通过的时刻和速度,微处理器可以实时监测和记录矿车的运行情况,为后续的数据分析和决策提供依据。
- 还没有人留言评论。精彩留言会获得点赞!