一种道岔尖轨密贴检测方法及系统与流程
本发明涉及轨道交通病害检测,具体涉及一种道岔尖轨密贴检测方法及系统。
背景技术:
1、铁路是国民经济的大动脉,对铁路状态进行检修,是保证铁路安全运行的重要保障。道岔用于引导火车进行变道,是铁路的重要组成部分。道岔中存在尖轨,尖轨与钢轨在正常情况下,需要贴紧,才能确保引导火车车轮正确变道,否则会导致列车车轮出轨,酿成车祸。
2、目前,主要采用人工巡道方法,将不同厚度的钢尺插入钢轨与尖轨的缝隙,用于检测尖轨密贴状态,这种方式存在检测效率低的突出问题。为此,针对该问题,本发明提供一种道岔尖轨密贴自动检测系统,用于自动判定是否存在密贴不足,并对密贴的缝隙进行定量测量。
技术实现思路
1、为解决背景技术中的问题,本发明提出了一种道岔尖轨密贴检测方法及系统,可自动实现尖轨密贴不足检测和间隙定量测量。
2、本发明采用的一个技术方案为:
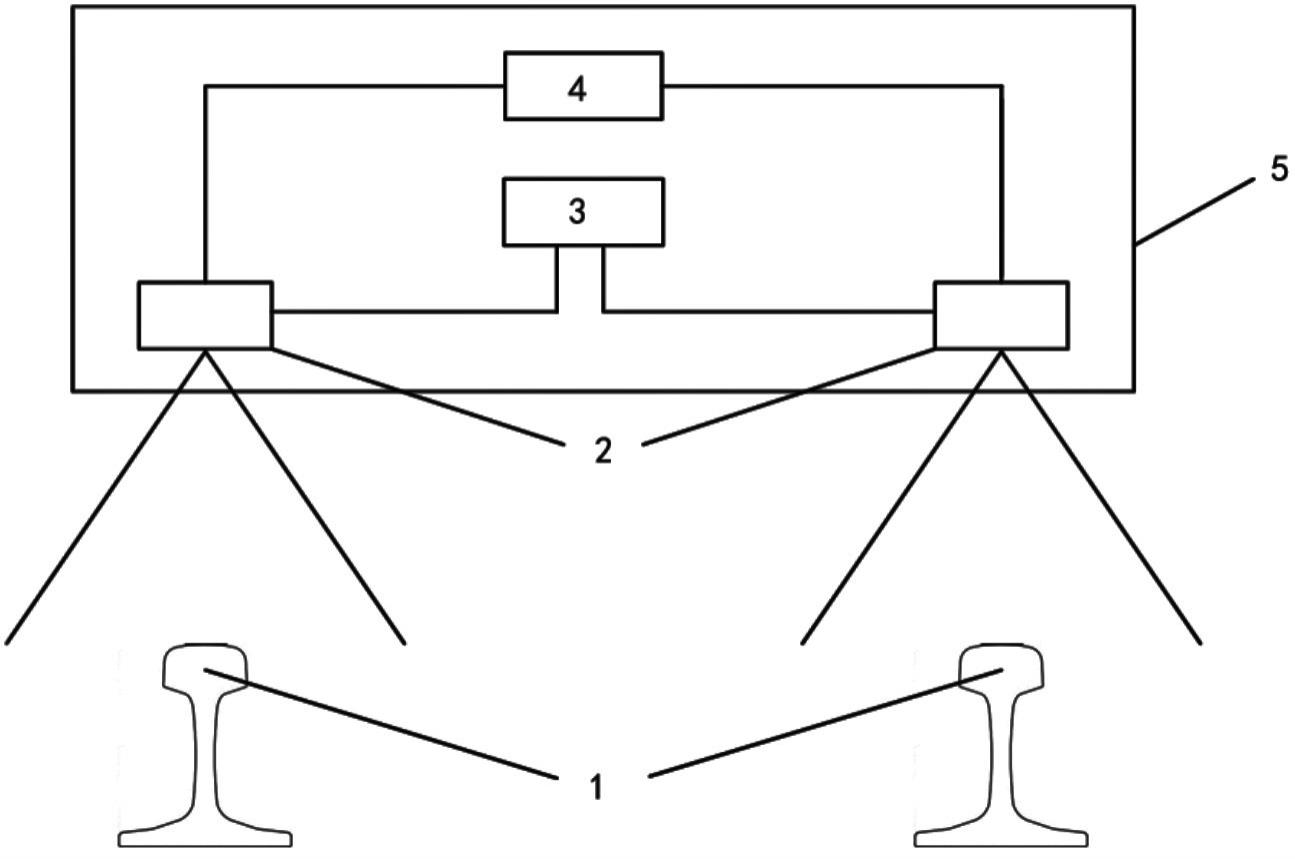
3、一种道岔尖轨密贴检测系统,由成像控制模块、视觉成像模块、图像处理模块和运载平台组成,所述视觉成像模块包括分别位于两侧钢轨正上方的2台成像单元,沿运载平台运动方向对钢轨进行成像,成像区域覆盖钢轨、尖轨、道岔,获取成像区域的纹理图像和/或深度图像。
4、进一步的,所述成像单元由面阵相机和面光源组成,所述面阵相机和面光源同轴照明,相机光轴位于钢轨内边缘正上方,获取成像区域纹理图像。
5、进一步的,所述成像单元为线阵相机和线光源,所述线阵相机和线光源同轴照明,线阵相机的光心位于钢轨内边缘正上方,获取成像区域的纹理图像;
6、所述成像单元沿运载平台运动方向的成像分辨率不低于1mm/pixel,与运载平台运动方向垂直方向上的成像分辨率不低于0.05mm/pixel。
7、进一步的,所述成像单元为线结构光3d相机,3d相机位于钢轨正上方,获取钢轨及尖轨的纹理图像和深度图像。
8、进一步的,所述成像单元为线结构光3d相机,3d相机位于钢轨内侧斜上方,线结构光平面与钢轨延伸方向垂直,3d相机测量区域覆盖钢轨顶部及内侧面、尖轨顶部及内侧面,3d相机x、y方向的测量精度不低于0.1mm,z方向的测量精度不低于0.05mm。
9、本发明采用的另一个技术方案为:
10、一种道岔尖轨密贴检测方法,包含如下步骤:
11、采集成像区域图像,并从该图像中检测出第一对象;
12、在采集的成像区域图像中,基于第一对象,判断是否存在尖轨密贴不足;
13、若存在尖轨密贴不足,则计算尖轨密贴间隙;
14、其中,所述成像区域包含钢轨、尖轨、道岔;
15、所述图像包括纹理图像和/或深度图像。
16、进一步的,一种道岔尖轨密贴检测方法,包含如下步骤:
17、采集成像区域纹理图像,并从该图像中检测出钢轨和尖轨;
18、检测出尖轨后,在纹理图像中,以钢轨为轴、垂直于钢轨延伸方向设置m1个采样窗口,沿钢轨延伸方向对采样窗口内像素进行投影,在投影曲线上,以钢轨内侧边缘为中心,对[-u,u]范围内投影曲线进行取样,基于取样曲线,采用分类器判定是否存在尖轨密贴不足;
19、所述采用分类器判定尖轨密贴不足的方法是:
20、人工设置两个样本集:密贴、密贴不足;采用模式识别方法训练分类器;利用训练的分类器对取样曲线进行分类,根据分类结果判定是否存在尖轨密贴不足。
21、若存在尖轨密贴不足,测量所述取样曲线中波谷的宽度,作为尖轨密贴间隙测量值,取m1个尖轨密贴间隙测量值的均值或最大值作为最终的尖轨密贴间隙。
22、进一步的,一种道岔尖轨密贴检测方法,包含如下步骤:
23、采集成像区域纹理图像,并从该图像中检测出钢轨和尖轨;
24、检测出尖轨后,在纹理图像中,采用边缘提取方法检测钢轨内侧边缘、尖轨第一台阶边缘,以钢轨为轴、垂直于钢轨延伸方向设置m2个采样线,计算钢轨内侧边缘到尖轨底部边缘的宽度值wi,当wi>t时,判定尖轨存在间隙;
25、存在间隙时,用wi-t=wi’作为间隙宽度,t为尖轨与钢轨紧贴时的宽度,取m2个间隙宽度的均值或最大值作为尖轨密贴间隙。
26、进一步的,一种道岔尖轨密贴检测方法,包含如下步骤:
27、采集成像区域深度图像,并从该图像中检测出钢轨,根据钢轨位置找出钢轨内边缘,通过深度学习方法检测出滑床板;
28、在检测出的滑床板区域,垂直于钢轨延伸方向,设置矩形检测窗口,在检测窗口内,测量钢轨内边缘到尖轨第一台阶边缘的距离d1、到尖轨第二台阶边缘的距离d2,判定d1、d2是否超过了尖轨与钢轨密贴时,钢轨内边缘到尖轨第一台阶边缘的距离d10、第二台阶边缘的距离d20,若任一个超过,则存在尖轨密贴不足;
29、存在尖轨密贴不足时,计算di=(d1-d10+d2-d20)/2,作为尖轨密贴间隙。
30、进一步的,一种道岔尖轨密贴检测方法,包含如下步骤:
31、预先采集道岔深度图像,以扣件为单位进行切图,使每一幅图像中只包含一行扣件,检测尖轨靠贴处、滑床板,记录切割后的预先采集的道岔深度图像和尖轨靠贴处、滑床板标记区域,作为背景数据库;
32、采集当前道岔深度图像,以预先采集的道岔深度图像为基准,对当前采集图像进行切图,生成与背景数据库一一对应的前景图像;
33、获取对应的前景图像和预先采集的道岔深度图像,判断背景数据库是否存在尖轨靠贴处,存在则获取滑床板标记区域和尖轨靠贴处;
34、根据滑床板位置,设定测量区域,在预先采集的道岔深度图像和前景图像中,分别测量钢轨外边缘到尖轨底部边缘的宽度;
35、在前景图像中判断尖轨和钢轨之间是否存在缝隙,存在则尖轨靠贴不足,不存在则判定前景图像中钢轨外边缘到尖轨底部边缘的宽度是否增加、并超限,当存在增加和超限时,判定存在尖轨靠贴不足。
36、进一步的,一种道岔尖轨密贴检测方法,包含如下步骤:
37、采集钢轨及尖轨深度图像,从钢轨深度图像、尖轨深度图像中分别找到钢轨、尖轨,检测滑床板;
38、在检测出的滑床板区域垂直于钢轨延伸方向设置矩形检测窗口,在检测窗口内,垂直于钢轨延伸方向设置n个采样线,获取n条钢轨及尖轨轮廓曲线;
39、在n条钢轨及尖轨轮廓线中,对钢轨内边缘进行线段拟合得到l1,对尖轨第一台阶竖直边缘进行线段拟合得到l2,对尖轨第二台阶竖直边缘进行线段拟合得到l3;
40、计算l1到l2的距离d3、l1到l3的距离d4,判定d3、d4是否超过尖轨紧贴钢轨时l1到l2的距离d30、l1到l3的距离d40,,若任一超过则存在尖轨密贴不足;
41、存在尖轨密贴不足时,计算di=(d3-d30+d4-d40)/2作为尖轨密贴间隙测量值,对n个尖轨密贴间隙测量值di取均值或最大值作为该检测窗口内尖轨密贴间隙。
42、进一步的,一种道岔尖轨密贴检测方法,包含如下步骤:
43、采集钢轨及尖轨深度图像,从钢轨深度图像、尖轨深度图像中分别找到钢轨、尖轨,检测出滑床板;
44、在滑床板区域,垂直于钢轨延伸方向,设置矩形检测窗口,在检测窗口内,垂直于钢轨延伸方向设置m3个采样线,获取m3条钢轨及尖轨轮廓曲线;
45、根据钢轨内侧边缘位置,拟合钢轨内侧竖直边缘线段l4;根据尖轨位置,计算尖轨轨腰曲线拟合圆心o1,计算圆心o1到l4的距离f1;
46、对m3个轮廓曲线,得到m3个测量结果f1,判定f1是否超过了尖轨紧贴钢轨时的距离e1,若超过则存在尖轨密贴不足;
47、存在尖轨密贴不足时,计算hi=f1-e1作为尖轨密贴间隙测量值;对m3个尖轨密贴间隙测量值hi取均值或最大值作为该检测窗口内尖轨密贴间隙。
48、进一步的,一种道岔尖轨密贴检测方法,包含如下步骤:
49、采集钢轨及尖轨深度图像,从钢轨深度图像、尖轨深度图像中分别找到钢轨、尖轨,检测出滑床板区域;
50、在滑床板区域,垂直于钢轨延伸方向,设置矩形检测窗口,在检测窗口内,根据钢轨内侧边缘位置,拟合钢轨内侧竖直边缘平面p1;
51、在检测窗口内,垂直于钢轨延伸方向设置r条采样线,获取r条钢轨及尖轨轮廓曲线;
52、根据尖轨位置,计算尖轨轨腰曲线拟合圆心o2,计算圆心o2到p1的距离si;判定si是否超过了尖轨紧贴钢轨时的距离e2,若超过则判定存在尖轨密贴不足;
53、存在尖轨密贴不足时,计算gi=si-e2作为尖轨间隙测量值,对r个尖轨密贴间隙测量值gi取均值或最大值作为该检测窗口内尖轨密贴间隙测量结果。
54、本发明的有益效果是:
55、本发明提出了基于视觉检测方法的自动检测系统和方法,对视觉成像模块中成像单元进行了改进,可自动实现尖轨密贴不足检测和间隙定量测量。成像单元为面阵相机和面光源时,通过同轴打光,并将相机光轴设置于钢轨内边缘正上方,能够获取高质量的钢轨与尖轨靠贴缝隙的清晰图像。成像单元为线阵相机和线光源时,不仅可以降低成本,还能增大缝隙的测量分辨率,其分辨率可达到0.05mm/pixel,显著提升了缝隙的测量精度。
56、成像单元为线结构光3d相机,可以同时获取钢轨、尖轨的纹理图像和深度图像,基于纹理图像和深度图像,可以从多个维度实现钢轨靠贴不足的检测与测量。进一步地,成像单元为线结构光3d相机,且3d相机安装于钢轨内侧斜上方时,该检测系统倾斜成像,从内侧进行测量时,能够对钢轨内边缘清楚成像,相比垂直成像(3d相机位于钢轨正上方),获取的钢轨内边缘数据更丰富,并利用钢轨内侧边缘平面尖轨第一台阶边缘平面的距离来判定是否密贴,具有更好的鲁棒性。且这种硬件架构,还可以用于钢轨轮廓测量,具有一机多用的效果。
57、针对密贴缝隙测量需求,除通过纹理图像进行边缘检测、测量边缘之间的距离外,我们还通过多个采样曲线测量结果的统计情况来判定密贴情况,具有更好的鲁棒性。
58、更进一步,在采用倾斜安装3d相机时,利用了尖轨边缘直线/平面、尖轨圆弧等区域进行直线/平面、圆弧圆心拟合,计算圆心到直线/平面的距离,相比直接测量边缘距离具有更高测量精度。
- 还没有人留言评论。精彩留言会获得点赞!