一种可爬坡混凝土鱼雷罐车的制作方法
本技术涉及混凝土加工,具体为一种可爬坡混凝土鱼雷罐车。
背景技术:
1、鱼雷罐车是混凝土预制构件生产工厂中,将搅拌站搅拌完成的混凝土运输至生产线上的一种运输小车,由两个驱动电机通过传动链条驱动行走轮,行走轮在两根工字钢轨道上行走,行走轮一般为聚氨酯材质,鱼雷罐车承载混凝土的结构称为罐体,罐体为圆筒形状,罐体上有一个方形口,方形口朝上时可以在搅拌站下接混凝土,接满混凝土后,沿轨道行走至目的流水线。当到达目的流水线,需要卸料时,罐体翻转电机会驱动罐体沿中轴线旋转,将罐体中的混凝土倒出,完成卸料。
2、但是由于目前的鱼雷罐车载重在4.5t左右,加上自身重量,整体重量可达6t,靠4个行走轮支撑行走,为保证行走轮耐用,一般会采用钢轮,或者在行走轮外圈包一层聚氨酯,行走轮的摩擦轮有限,一般只能在水平的轨道上行走,如果遇到需要爬坡的工况,会出现打滑,无法实现爬坡,采用橡胶履带进行行走又无法满足结实耐用的需求。
技术实现思路
1、本实用新型的目的在于提供一种可爬坡混凝土鱼雷罐车,以解决上述背景技术中提出的由于目前鱼雷罐车载重在4.5t左右,加上自身重量,整体重量可达6t,靠4个行走轮支撑行走,为保证行走轮耐用,一般会采用钢轮,或者在行走轮外圈包一层聚氨酯,行走轮的摩擦轮有限,一般只能在水平的轨道上行走,如果遇到需要爬坡的工况,会出现打滑,无法实现爬坡,采用橡胶履带进行行走又无法满足结实耐用的需求的问题。
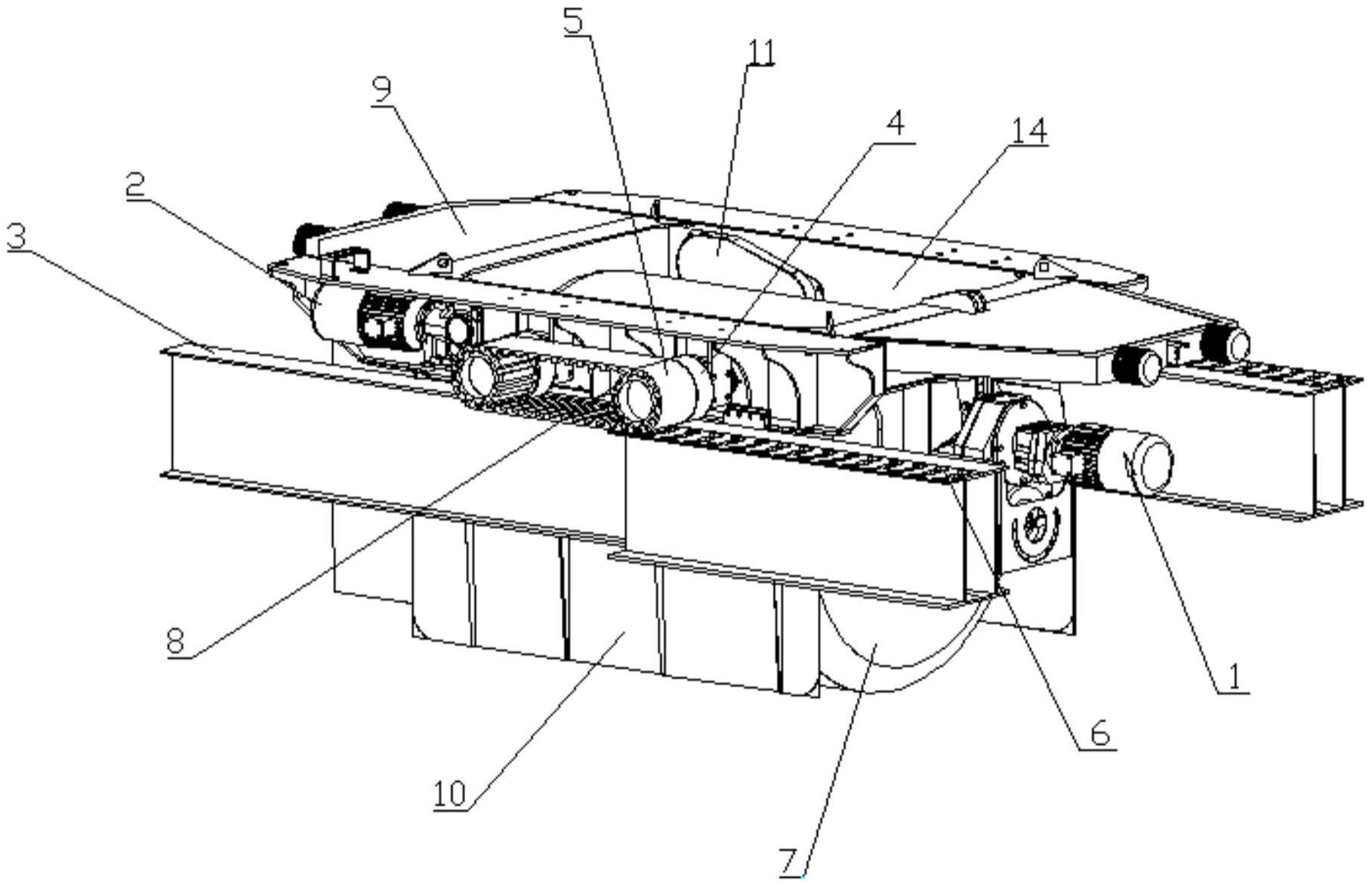
2、为实现上述目的,本实用新型提供如下技术方案:一种可爬坡混凝土鱼雷罐车,包括车体,所述车体的顶部表面开设有传动槽,所述传动槽的内侧设置有罐体,所述传动槽的一侧内壁设置有传动传动链条,所述车体靠近底部的两侧表面皆设置有行走轮,所述行走轮的外侧表面皆设置有履带驱动齿轮,所述履带驱动齿轮的外侧表面设置有履带,所述行走轮的底部设置有驱动轨道。
3、优选的,所述罐体的一侧表面设置有罐体翻转电机,所述行走轮的一侧车体侧壁设置有驱动电机,且罐体翻转电机和驱动电机皆通过传动轴与罐体和行走轮连接。
4、优选的,所述驱动轨道的底部皆设置有行走轨道,且行走轨道的底部皆设置有支撑底板。
5、优选的,所述履带和驱动轨道采用的材质为橡胶,且传动槽的顶部设置为开口结构。
6、优选的,所述罐体的一侧车体底部两侧皆设置有密封板,且密封板的一侧表面设置有拉手。
7、与现有技术相比,本实用新型的有益效果是:
8、该一种可爬坡混凝土鱼雷罐车,在进行日常使用的过程中,通过在原有鱼雷罐车的基础上,只进行微小的改动,就可以实现鱼雷罐车爬坡,既可以满足鱼雷罐车在正常工况结实耐用的需求,又可以增大摩擦力实现爬坡,爬坡橡胶履带及橡胶轨道,该结构方式为创新应用,为实现爬坡功能进行的升级设计。
9、该一种可爬坡混凝土鱼雷罐车,在进行日常使用的过程中,在每个原行走轮外加宽设置一个橡胶履带驱动齿轮,同边的驱动齿轮驱动一条橡胶履带转动,在水平工况时,橡胶履带处于悬空状态,在爬坡段时,在原行走轨道外铺设一段橡胶面的轨道,橡胶履带与橡胶面轨道挤压产生较大摩擦力,防止鱼雷罐车打滑,即可实现鱼雷罐车爬坡,橡胶履带可增加增大摩擦面积。
技术特征:
1.一种可爬坡混凝土鱼雷罐车,包括车体(9),其特征在于:所述车体(9)的顶部表面开设有传动槽(14),所述传动槽(14)的内侧设置有罐体(7),所述传动槽(14)的一侧内壁设置有传动传动链条(11),所述车体(9)靠近底部的两侧表面皆设置有行走轮(4),所述行走轮(4)的外侧表面皆设置有履带驱动齿轮(8),所述履带驱动齿轮(8)的外侧表面设置有履带(5),所述行走轮(4)的底部设置有驱动轨道(6)。
2.根据权利要求1所述的一种可爬坡混凝土鱼雷罐车,其特征在于:所述罐体(7)的一侧表面设置有罐体翻转电机(1),所述行走轮(4)的一侧车体(9)侧壁设置有驱动电机(2),且罐体翻转电机(1)和驱动电机(2)皆通过传动轴与罐体(7)和行走轮(4)连接。
3.根据权利要求1所述的一种可爬坡混凝土鱼雷罐车,其特征在于:所述驱动轨道(6)的底部皆设置有行走轨道(3),且行走轨道(3)的底部皆设置有支撑底板(10)。
4.根据权利要求1所述的一种可爬坡混凝土鱼雷罐车,其特征在于:所述履带(5)和驱动轨道(6)采用的材质为橡胶,且传动槽(14)的顶部设置为开口结构。
5.根据权利要求1所述的一种可爬坡混凝土鱼雷罐车,其特征在于:所述罐体(7)的一侧车体(9)底部两侧皆设置有密封板(12),且密封板(12)的一侧表面设置有拉手(13)。
技术总结
本技术公开了一种可爬坡混凝土鱼雷罐车,包括车体,所述车体的顶部表面开设有传动槽,所述传动槽的内侧设置有罐体,所述传动槽的一侧内壁设置有传动传动链条,所述车体靠近底部的两侧表面皆设置有行走轮,所述行走轮的外侧表面皆设置有履带驱动齿轮,所述履带驱动齿轮的外侧表面设置有履带,所述行走轮的底部设置有驱动轨道,所述罐体的一侧表面设置有罐体翻转电机。该一种可爬坡混凝土鱼雷罐车,通过在原有鱼雷罐车的基础上,只进行微小的改动,就可以实现鱼雷罐车爬坡,既可以满足鱼雷罐车在正常工况结实耐用的需求,又可以增大摩擦力实现爬坡,爬坡橡胶履带及橡胶轨道,该结构方式为创新应用,为实现爬坡功能进行的升级设计。
技术研发人员:陈明,高威
受保护的技术使用者:湖南百控智能装备有限公司
技术研发日:20230216
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!