一种铁路轨道探测巡检机器人的制作方法
本技术涉及铁路轨道巡检,具体是一种铁路轨道探测巡检机器人。
背景技术:
1、铁路轨道在长期使用过程中,车辆对轨道产生的冲击、磨损等有害因素也会使铁路状态发生变化,因此轨道检测是保证铁路安全运营的重中之重。进而导致车辆经过该区域时存在较大冲击或碰撞,对车辆寿命造成较大影响。
2、经检索,中国专利公开号为cn213262369u的中国专利,公开了一种铁路巡检机器人底盘及其机器人,包括主体、驱动轮组件及随动轮组件,驱动轮组件及随动轮组件均连接于主体,驱动轮组件通过第一弹性悬架连接于主体,随动轮组件通过第二弹性悬架连接于主体,主体通过第一弹性悬架及第二弹性悬架分别弹性连接于驱动轮组件及随动轮组件,使驱动轮组件及随动轮组件保持与铁路轨道的压合。
3、由于外部因素的影响,轨道上可能会存在一些石子等异物,巡检机器人在轨道上行走时,如果碾压在这些异物上则可能会导致机器人行驶不稳,甚至会导致脱轨的问题。
技术实现思路
1、本实用新型的目的在于提供一种铁路轨道探测巡检机器人,以解决上述背景技术中提出的问题。
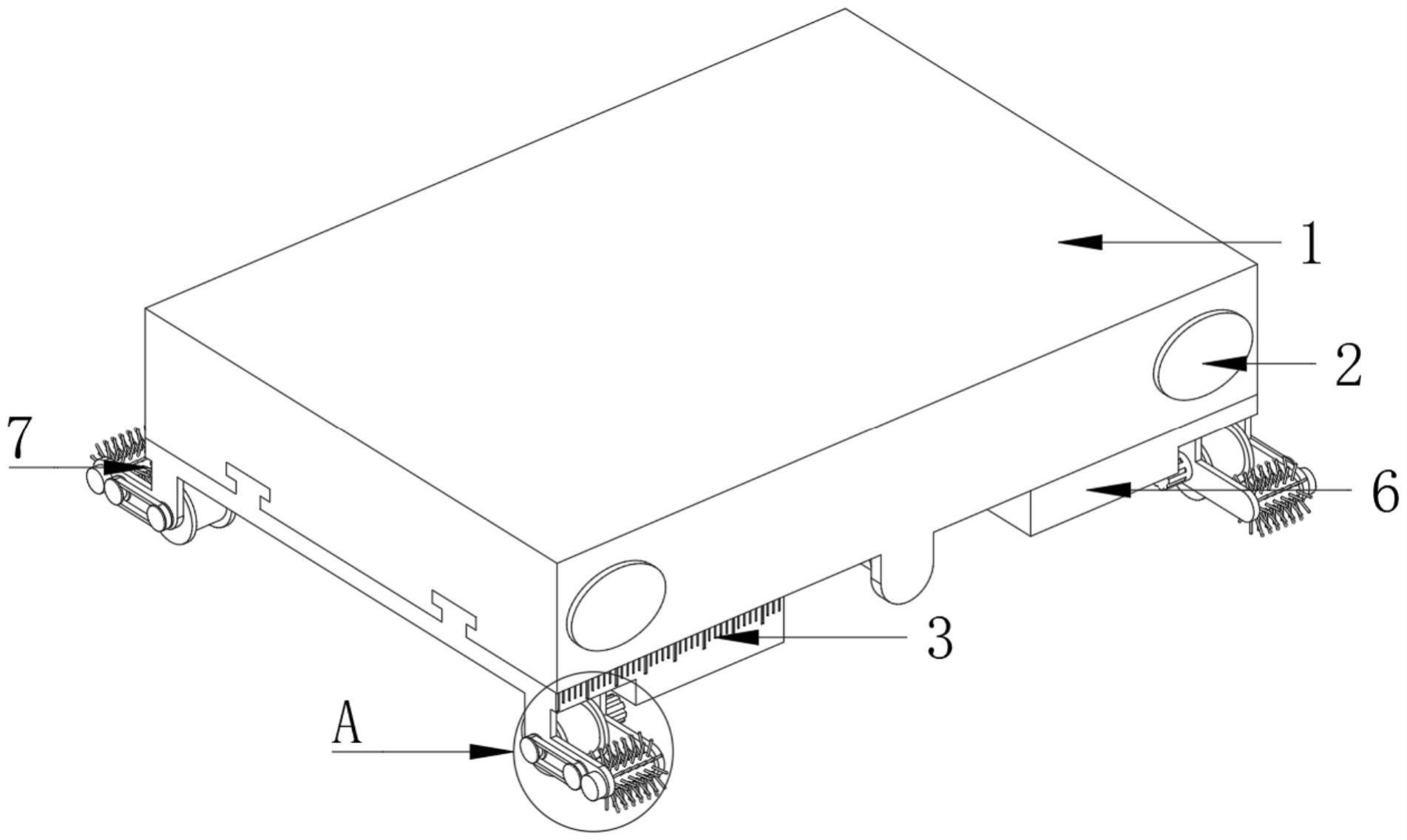
2、本实用新型的技术方案是:一种铁路轨道探测巡检机器人,包括:
3、机器人本体,所述机器人本体底部滑动连接有两个安装块,两个所述安装块上均安装有两个清扫组件,所述清扫组件包括安装块一侧外壁上固定连接的两个安装板;
4、两个带轮,两个所述带轮均转动连接在其中一个安装板上,两个所述带轮套设有同一个皮带;
5、从动轮,所述从动轮转动连接在其中一个安装板上,且从动轮与其中一个带轮相接触;
6、清扫刷,所述清扫刷转动连接在两个安装板上,所述清扫刷与其中一个从动轮同轴固定。
7、优选的,所述安装块相互远离的一侧均固定安装有多个电机一,多个所述电机一输出端分别与多个滚轮同轴固定。
8、优选的,所述机器人本体底部安装有伸缩组件,两个所述安装块均与伸缩组件传动连接。
9、优选的,所述伸缩组件包括机器人本体两端内壁上转动连接的同一个驱动螺杆,所述驱动螺杆上螺纹套设有移动块,所述移动块两侧均转动连接有限位杆,两个所述限位杆分别转动连接在两个安装块上,所述机器人本体一端外壁上固定安装有电机二,所述电机二输出端与驱动螺杆同轴固定。
10、优选的,其中一个所述安装块一端外壁上设置有刻度线。
11、优选的,所述机器人本体一端外壁两侧均固定安装有照明灯。
12、本实用新型通过改进在此提供一种铁路轨道探测巡检机器人,与现有技术相比,具有如下改进及优点:
13、其一:本实用新型通过设置清扫组件,能够提前对机器人本体行走的轨道上提前进行清理,从而能够保证这些异物不会妨碍到机器人本体的正常移动状态,滚轮转动时将会带动其中一个带轮转动,这个带轮通过皮带即可带动另一个带轮转动,进而这个带轮则会带动从动轮进行逆时针转动,从动轮带动清扫刷在滚轮前方进行清理,即可将轨道上的异物清扫下去;
14、其二:本实用新型通过设置伸缩组件,根据轨道的宽度调节好两个安装板之间的距离,进而使得多个滚轮也能够使用在不同规格的轨道,使得装置的适应性更强,电机二带动驱动螺杆转动,由于移动块受到两个限位杆的限制无法转动,因此驱动螺杆即可带动移动块沿着其移动,而两个驱动杆另一端分别转动连接在两个安装块上,移动块通过限位杆即可驱使两个安装块相互远离,进而设置在安装块上的滚轮位置也会随之发生变化。
技术特征:
1.一种铁路轨道探测巡检机器人,其特征在于:包括:
2.根据权利要求1所述的一种铁路轨道探测巡检机器人,其特征在于:所述安装块(604)相互远离的一侧均固定安装有多个电机一(5),多个所述电机一(5)输出端分别与多个滚轮(4)同轴固定。
3.根据权利要求1所述的一种铁路轨道探测巡检机器人,其特征在于:所述机器人本体(1)底部安装有伸缩组件(6),两个所述安装块(604)均与伸缩组件(6)传动连接。
4.根据权利要求3所述的一种铁路轨道探测巡检机器人,其特征在于:所述伸缩组件(6)包括机器人本体两端内壁上转动连接的同一个驱动螺杆(601),所述驱动螺杆(601)上螺纹套设有移动块(602),所述移动块(602)两侧均转动连接有限位杆(603),两个所述限位杆(603)分别转动连接在两个安装块(604)上,所述机器人本体(1)一端外壁上固定安装有电机二(605),所述电机二(605)输出端与驱动螺杆(601)同轴固定。
5.根据权利要求1所述的一种铁路轨道探测巡检机器人,其特征在于:其中一个所述安装块(604)一端外壁上设置有刻度线(3)。
6.根据权利要求1所述的一种铁路轨道探测巡检机器人,其特征在于:所述机器人本体(1)一端外壁两侧均固定安装有照明灯(2)。
技术总结
本技术涉及铁路轨道巡检技术领域,具体是一种铁路轨道探测巡检机器人,包括:机器人本体,所述机器人本体底部滑动连接有两个安装块,两个所述安装块上均安装有两个清扫组件,所述清扫组件包括安装块一侧外壁上固定连接的两个安装板;两个带轮,两个所述带轮均转动连接在其中一个安装板上,两个所述带轮套设有同一个皮带;从动轮,所述从动轮转动连接在其中一个安装板上,且从动轮与其中一个带轮相接触;清扫刷,所述清扫刷转动连接在两个安装板上,本技术通过设置清扫组件,能够提前对机器人本体行走的轨道上提前进行清理,从而能够保证这些异物不会妨碍到机器人本体的正常移动状态。
技术研发人员:邹清静,呼延斌,刘文革,王彦召,王霞军
受保护的技术使用者:易程融创信息科技有限公司
技术研发日:20230330
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!