列车位置的追踪方法及装置、电子设备、存储介质与流程
本发明涉及轨道交通领域,具体而言,涉及一种列车位置的追踪方法及装置、电子设备、存储介质。
背景技术:
1、相关技术中,城市轨道交通成为广大市民出行的主要交通工具,其基本任务是安全、准时、高效地运送乘客,轨道交通运营安全、准时高效也逐渐成为运营管理者和广大市民关心的话题之一。
2、在运营过程中,一旦有列车定位误差较大,导致位置不准确丢失位置;或者btm故障不能受到应答器位置信息,导致连续丢失两个应答器而丢失位置,列车atp(列车自动防护,automatic train protection)输出紧急制动,迫使列车停车,导向安全侧。
3、在fao(全自动运行系统,fully automatic operation)全自动运行的运营过程中,一旦有列车位置丢失,进入降级运营rsrm(低速恢复)控车模式中,地面系统zc(区域控制器)系统将采用的是非通信车连续占用的方式进行列车追踪。此技术的缺点采用的是非通信车连续占用的方式,此时列车追踪只能追踪一辆列车,当多辆列车在同一个计轴区段内或者相邻区段上,同时是非通信车或者rsrm列车时,即无法进行有效的追踪和区分,导致进入rsrm控车失败或者列车追踪失败。
4、针对相关技术中存在的上述问题,暂未发现有效的解决方案。
技术实现思路
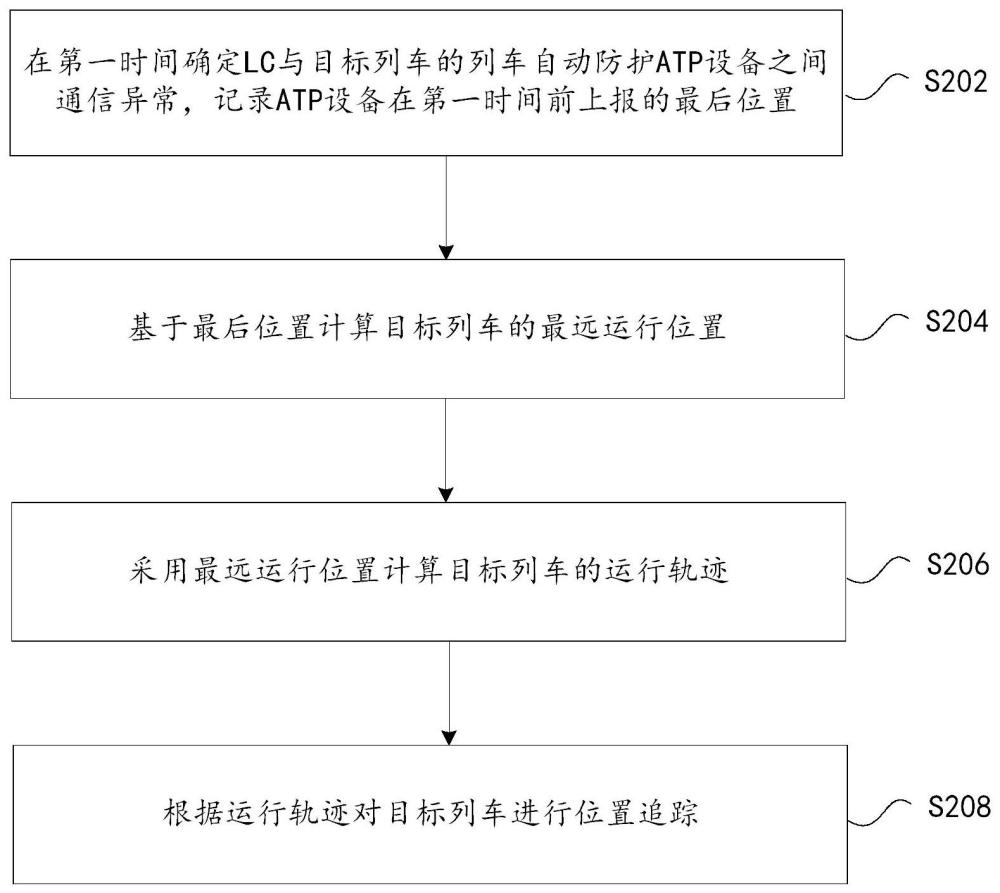
1、本发明提供了一种列车位置的追踪方法及装置、电子设备、存储介质。根据本技术实施例的一个方面,提供了一种列车位置的追踪方法,应用在线路控制器lc,所述方法包括:在第一时间确定lc与目标列车的列车自动防护atp设备之间通信异常,记录所述atp设备在所述第一时间前上报的最后位置;基于所述最后位置计算所述目标列车的最远运行位置;采用所述最远运行位置计算所述目标列车的运行轨迹;根据所述运行轨迹对所述目标列车进行位置追踪。
2、进一步,基于所述最后位置计算所述目标列车的最远运行位置包括:以所述第一时间为起始时间,在确定lc与所述目标列车之间通信中断的第二时间之前,计算所述目标列车通信异常的累计时长t,获取所述目标列车在所述最后位置时的最后速度v;采用所述累计时长t和所述最后速度v计算所述目标列车的最大速度;根据所述最大速度计算所述目标列车的最远运行距离;在到达所述第二时间之后,根据所述最大速度计算所述目标列车的制动距离;采用所述最远运行距离、所述制动距离、以及所述最后位置计算所述目标列车的最远运行位置。
3、进一步,根据所述最大速度计算所述目标列车的最远运行距离包括:判断所述最大速度是否大于所述目标列车的最高限速;若所述最大速度大于所述目标列车的最高限速,按照以下公式计算所述目标列车的最远运行距离s:s=vt1+1/2at12+vt2;所述最大速度小于或等于所述目标列车的最高限速,按照以下公式计算所述目标列车的最远运行距离s:s=vt+1/2at2;其中,t1为所述目标列车到达最大限速的时间,t2=t-t1,v为最高限速。
4、进一步,计算所述目标列车通信异常的累计时长t包括:记录所述lc当前与所述atp设备通信异常的周期数n;采用以下公式计算所述目标列车通信异常的累计时长t:t=n*tc;其中,tc为lc的运行周期时间,n为周期数。
5、进一步,采用所述最远运行位置计算所述目标列车的运行轨迹包括:判断所述最远运行位置是否有效;若所述最远运行位置有效,确定所述目标列车进入低速恢复rsrm模式,按照周期实时获取所述目标列车的运行速度v1;采用以下公式计算当前周期的周期距离s:s=((v1+v2)*t)/2;其中,v1为当前周期的速度,v2为上一周期的速度,t为周期时长;基于所述最远运行位置和所述周期距离更新所述目标列车在当前周期的实时位置;根据每周期计算更新所述目标列车的实时位置,形成所述目标列车的运行轨迹。
6、进一步,判断所述最远运行位置是否有效包括:定位所述最远运行位置所在的目标计轴区段;获取所述目标计轴区段的轨旁设备的第一占用状态;若所述目标计轴区段的轨旁设备的占用状态为已占用状态,确定所述目标列车进入所述目标计轴区段;若所述目标计轴区段的轨旁设备的占用状态为未占用状态,获取所述目标计轴区段的前一相邻计轴区段的第二占用状态;若所述第二占用状态为未占用状态,确定所述最远运行位置有效。
7、进一步,在判断所述最远运行位置是否有效之后,所述方法还包括:若所述最远运行位置无效,定位所述最远运行位置所在的目标计轴区段;采用所述目标计轴区段的起始位置更新所述最远运行位置,确定所述目标列车为非通信车。
8、根据本技术实施例的另一个方面,还提供了一种列车位置的追踪装置,应用在线路控制器lc,所述装置包括:记录模块,用于在第一时间确定lc与目标列车的列车自动防护atp设备之间通信异常,记录所述atp设备在所述第一时间前上报的最后位置;第一计算模块,用于基于所述最后位置计算所述目标列车的最远运行位置;第二计算模块,用于采用所述最远运行位置计算所述目标列车的运行轨迹;追踪模块,用于根据所述运行轨迹对所述目标列车进行位置追踪。
9、进一步,所述第一计算模块包括:处理单元,用于以所述第一时间为起始时间,在确定lc与所述目标列车之间通信中断的第二时间之前,计算所述目标列车通信异常的累计时长t,获取所述目标列车在所述最后位置时的最后速度v;第一计算单元,用于采用所述累计时长t和所述最后速度v计算所述目标列车的最大速度;第二计算单元,用于根据所述最大速度计算所述目标列车的最远运行距离;第三计算单元,用于在到达所述第二时间之后,根据所述最大速度计算所述目标列车的制动距离;第四计算单元,用于采用所述最远运行距离、所述制动距离、以及所述最后位置计算所述目标列车的最远运行位置。
10、进一步,所述第二计算单元包括:判断子单元,用于判断所述最大速度是否大于所述目标列车的最高限速;计算子单元,用于若所述最大速度大于所述目标列车的最高限速,按照以下公式计算所述目标列车的最远运行距离s:s=vt1+1/2at12+vt2;所述最大速度小于或等于所述目标列车的最高限速,按照以下公式计算所述目标列车的最远运行距离s:s=vt+1/2at2;其中,t1为所述目标列车到达最大限速的时间,t2=t-t1,v为最高限速。
11、进一步,所述处理单元包括:记录子单元,用于记录所述lc当前与所述atp设备通信异常的周期数n;计算子单元,用于采用以下公式计算所述目标列车通信异常的累计时长t:t=n*tc;其中,tc为lc的运行周期时间,n为周期数。
12、进一步,所述第二计算模块包括:判断单元,用于判断所述最远运行位置是否有效;第一确定单元,用于若所述最远运行位置有效,确定所述目标列车进入低速恢复rsrm模式,按照周期实时获取所述目标列车的运行速度v1;计算单元,用于采用以下公式计算当前周期的周期距离s:s=((v1+v2)*t)/2;其中,v1为当前周期的速度,v2为上一周期的速度,t为周期时长;更新单元,用于基于所述最远运行位置和所述周期距离更新所述目标列车在当前周期的实时位置;生成单元,用于根据每周期计算更新所述目标列车的实时位置,形成所述目标列车的运行轨迹。
13、进一步,所述判断单元包括:定位子单元,用于定位所述最远运行位置所在的目标计轴区段;获取子单元,用于获取所述目标计轴区段的轨旁设备的第一占用状态;处理子单元,用于若所述目标计轴区段的轨旁设备的占用状态为已占用状态,确定所述目标列车进入所述目标计轴区段;若所述目标计轴区段的轨旁设备的占用状态为未占用状态,获取所述目标计轴区段的前一相邻计轴区段的第二占用状态;确定子单元,用于若所述第二占用状态为未占用状态,确定所述最远运行位置有效。
14、进一步,所述第二计算模块还包括:定位单元,用于在所述判断单元判断所述最远运行位置是否有效之后,若所述最远运行位置无效,定位所述最远运行位置所在的目标计轴区段;第二确定单元,用于采用所述目标计轴区段的起始位置更新所述最远运行位置,确定所述目标列车为非通信车。
15、根据本技术实施例的另一方面,还提供了一种存储介质,该存储介质包括存储的程序,程序运行时执行上述的步骤。
16、根据本技术实施例的另一方面,还提供了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;其中:存储器,用于存放计算机程序;处理器,用于通过运行存储器上所存放的程序来执行上述方法中的步骤。
17、本技术实施例还提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述方法中的步骤。
18、通过本发明,在第一时间确定lc与目标列车的列车自动防护atp设备之间通信异常,记录atp设备在第一时间前上报的最后位置;基于最后位置计算目标列车的最远运行位置;采用最远运行位置计算目标列车的运行轨迹;根据运行轨迹对目标列车进行位置追踪,通过采用列车在通信异常时的最远运行位置及其有效状态计算列车的运行轨迹,实现了列车在通信异常和中断时对其位置的实时有效追踪,解决了相关技术中lc与列车atp设备通信异常时无法追踪列车位置的技术问题,知道列车运行的位置,能够拓扑出列车的前后关系,可为后续列车的追踪,提高运营效率和间隔。
- 还没有人留言评论。精彩留言会获得点赞!