一种适用于全方向轨道的攀爬移动机器人
本发明涉及具有推进装置的机器人,特别是涉及一种适用于全方向轨道的攀爬移动机器人。
背景技术:
1、输电杆塔、信号杆塔、隧道等含有轨道的基础设施都需要进行定期检修,轨道移动机器人需求旺盛。相关高校、科研院所、高新企业相继研发了各种轨道移动机器人。目前的轨道机器人普遍设计用于某一种特定轨道爬行,但在轨道出现弯曲时通常难以稳定攀爬,存在可靠性差、环境适应能力弱、体积庞大、重量大的缺点。
技术实现思路
1、针对上述现有技术缺陷,本发明的任务在于提供一种适用于全方向轨道的攀爬移动机器人,解决现有轨道攀爬移动机器人爬行可靠度低、无法在弯曲轨道爬行、只能适应单一轨道、机器人体积大结构复杂的问题。
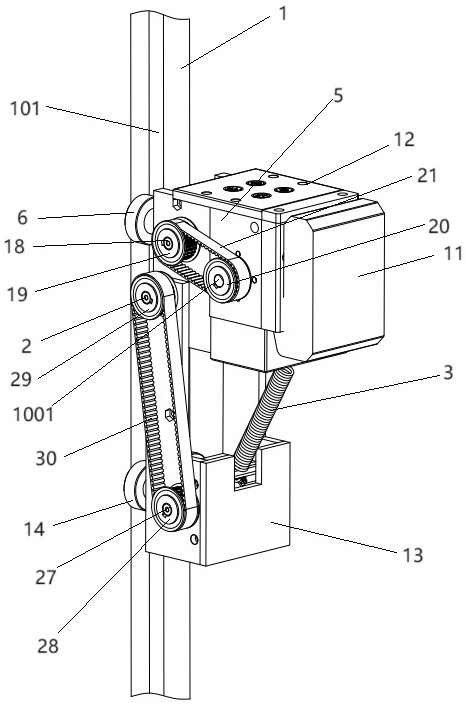
2、本发明技术方案如下:一种适用于全方向轨道的攀爬移动机器人,包括前行走机构和后行走机构,所述前行走机构包括前机架、前行走轮对和驱动装置,所述后行走机构包括后机架和后行走轮对,所述前机架与所述后机架通过中轴转动连接,所述中轴位于所述前行走轮对和所述后行走轮对之间,所述中轴上设有以所述中轴为轮轴的中行走轮,所述前机架与所述后机架之间设有弹性伸缩件,所述弹性伸缩件伸缩时对所述前机架和所述后机架施加转矩,所述前行走轮对包括左右并排设置的前左轮和前右轮,所述后行走轮对包括左右并排设置的后左轮和后右轮,所述前左轮、所述前右轮、所述后左轮和所述后右轮行走于轨道的左右侧凹槽内,所述前左轮、所述前右轮、所述后左轮和所述后右轮的轮轴均垂直于所述中轴,所述中行走轮行走于轨道的前侧面,所述驱动装置通过传动机构驱动所述前左轮、所述前右轮、所述后左轮、所述后右轮和所述中行走轮同步转动。
3、进一步地,所述前行走轮对设置于所述前机架的第一侧,所述前机架设有与所述第一侧相对的第二侧,所述驱动装置包括减速电机和电源,所述驱动装置设置于所述第二侧。
4、进一步地,所述前机架设有前齿轮轴,所述后机架设有后齿轮轴,所述驱动装置与所述前齿轮轴之间、所述前齿轮轴与所述中轴之间以及所述中轴与所述后齿轮轴之间通过带轮同步传动,所述前齿轮轴用于驱动所述前行走轮对转动,所述后齿轮轴用于驱动所述后行走轮对转动。
5、进一步地,所述前左轮设有第一前轮轴,所述前右轮设有第二前轮轴,所述第一前轮轴、所述第二前轮轴通过锥齿轮与所述前齿轮轴传动。
6、进一步地,所述后左轮设有第一后轮轴,所述后右轮设有第二后轮轴,所述第一后轮轴、所述第二后轮轴通过锥齿轮与所述后齿轮轴传动。
7、进一步地,所述驱动装置的输出轴与所述前齿轮轴的第一端通过第一带轮机构传动,所述前齿轮轴的第二端与所述中轴的第二端通过第二带轮机构传动,所述中轴的第一端所述后齿轮轴的第一端通过第二带轮机构传动。
8、进一步地,所述中行走轮为槽轮。
9、进一步地,所述弹性伸缩件为弹簧。
10、进一步地,所述前左轮、所述前右轮、所述后左轮、所述后右轮和所述中行走轮均为胶轮。
11、本发明与现有技术相比的优点在于:
12、通过前行走轮对在轨道侧面的行走,利用中行走轮抵住轨道的前侧,形成的重力锁定结构,利用重力锁定原理实现了机器人在轨道的锁定效果,将具有更大重量的驱动装置设置在远离轨道的第二侧,可以在攀爬时增大中行走轮对轨道的压紧力,进一步增强锁定效果。
13、前行走轮对、中行走轮以及后行走轮对均由驱动装置进行驱动,实现所有与轨道接触的行走轮的主动转动,所有行走轮均为主动轮,增大了机器人的牵引力。
14、将中行走轮的轮轴作为前行走机构和后行走机构转动连接的转轴,并由弹性伸缩件是前行走机构和后行走机构之间形成一定角度,在不同角度的弯轨处后行走机构有效增大重力锁定效果,提升了机器人移动攀爬能力、过弯能力、防滑能力、制动能力,攀爬移动机器人可以在轨道上稳定可靠的行走和过弯。
技术特征:
1.一种适用于全方向轨道的攀爬移动机器人,其特征在于,包括前行走机构和后行走机构,所述前行走机构包括前机架、前行走轮对和驱动装置,所述后行走机构包括后机架和后行走轮对,所述前机架与所述后机架通过中轴转动连接,所述中轴位于所述前行走轮对和所述后行走轮对之间,所述中轴上设有以所述中轴为轮轴的中行走轮,所述前机架与所述后机架之间设有弹性伸缩件,所述弹性伸缩件伸缩时对所述前机架和所述后机架施加转矩,所述前行走轮对包括左右并排设置的前左轮和前右轮,所述后行走轮对包括左右并排设置的后左轮和后右轮,所述前左轮、所述前右轮、所述后左轮和所述后右轮行走于轨道的左右侧凹槽内,所述前左轮、所述前右轮、所述后左轮和所述后右轮的轮轴均垂直于所述中轴,所述中行走轮行走于轨道的前侧面,所述驱动装置通过传动机构驱动所述前左轮、所述前右轮、所述后左轮、所述后右轮和所述中行走轮同步转动。
2.根据权利要求1所述的适用于全方向轨道的攀爬移动机器人,其特征在于,所述前行走轮对设置于所述前机架的第一侧,所述前机架设有与所述第一侧相对的第二侧,所述驱动装置包括减速电机和电源,所述驱动装置设置于所述第二侧。
3.根据权利要求1或2所述的适用于全方向轨道的攀爬移动机器人,其特征在于,所述前机架设有前齿轮轴,所述后机架设有后齿轮轴,所述驱动装置与所述前齿轮轴之间、所述前齿轮轴与所述中轴之间以及所述中轴与所述后齿轮轴之间通过带轮同步传动,所述前齿轮轴用于驱动所述前行走轮对转动,所述后齿轮轴用于驱动所述后行走轮对转动。
4.根据权利要求3所述的适用于全方向轨道的攀爬移动机器人,其特征在于,所述前左轮设有第一前轮轴,所述前右轮设有第二前轮轴,所述第一前轮轴、所述第二前轮轴通过锥齿轮与所述前齿轮轴传动。
5.根据权利要求3所述的适用于全方向轨道的攀爬移动机器人,其特征在于,所述后左轮设有第一后轮轴,所述后右轮设有第二后轮轴,所述第一后轮轴、所述第二后轮轴通过锥齿轮与所述后齿轮轴传动。
6.根据权利要求3所述的适用于全方向轨道的攀爬移动机器人,其特征在于,所述驱动装置的输出轴与所述前齿轮轴的第一端通过第一带轮机构传动,所述前齿轮轴的第二端与所述中轴的第二端通过第二带轮机构传动,所述中轴的第一端所述后齿轮轴的第一端通过第二带轮机构传动。
7.根据权利要求1至3中任意一项所述的适用于全方向轨道的攀爬移动机器人,其特征在于,所述中行走轮为槽轮。
8.根据权利要求1至3中任意一项所述的适用于全方向轨道的攀爬移动机器人,其特征在于,所述弹性伸缩件为弹簧。
9.根据权利要求1至3中任意一项所述的适用于全方向轨道的攀爬移动机器人,其特征在于,所述前左轮、所述前右轮、所述后左轮、所述后右轮和所述中行走轮均为胶轮。
技术总结
本发明公开了一种适用于全方向轨道的攀爬移动机器人,包括前、后行走机构,前行走机构包括前机架、前行走轮对和驱动装置,后行走机构包括后机架和后行走轮对,前机架与后机架通过中轴转动连接,中轴位于前、后行走轮对之间,中轴上设有以中轴为轮轴的中行走轮,前、后机架之间设有弹性伸缩件,弹性伸缩件伸缩时对前、后机架施加转矩,前行走轮对包括左右并排设置的前左、右轮,后行走轮对包括左右并排设置的后左、右轮,前左、右轮及后左、右轮行走于轨道的左右侧凹槽内且轮轴均垂直于中轴,中行走轮行走于轨道的前侧面,驱动装置通过传动机构驱动所有行走轮同步转动。本发明通过重力锁止,可以在轨道上稳定可靠的行走和过弯。
技术研发人员:岳湘,胡俊清,徐燕,丁力,乔雪洁,杨富豪,张洋,王伟
受保护的技术使用者:沈阳农业大学
技术研发日:
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!