一种防范制动故障列车追尾前行列车的调控方法与流程
本发明涉及铁路安全管理,尤其涉及一种防范制动故障列车追尾前行列车的调控方法。
背景技术:
1、传统的列车驾驶方案中,司机需要观察列车运行前方信号机的显示情况来判定列车该怎样运行,现在逐步演变为依据车载计算机显示的控制曲线来调整列车运行速度的方式,在列车搭载运行控制系统的情况下,司机依据车载设备显示的控车曲线对列车进行操控。
2、对于现有的目标—距离控制曲线而言,列车控制曲线的终点是前行列车占据的闭塞分区的始端,列车开始制动的起点(起模点)由空闲距离、目标速度以及列车本身的制动性能决定。控车曲线的终点相对固定,在同一闭塞分区内不因前行列车的移动而改变,均为前行列车占据的闭塞分区的始端。而制动的起点(起模点)会随列车制动性能和的线路参数的不同而变化。
3、当列车采用ctcs-2级(chinese train control system level 2)控制系统时,控车曲线由车载设备根据轨道电路以及应答器上传的信息配合生成。轨道电路实时向列车提供运行前方的轨道区段空闲/占用信息、通过设在每一个闭塞分区入口处设置的地面应答器向列车提供前方线路的轨道区段长度、限速以及坡度等信息,车载设备根据对上述信息的实时处理,生成目标―距离制动曲线监控列车运行。
4、当列车采用ctcs-3级(chinese train control system level 3)控制系统时,无线闭塞中心rbc(radio block center)根据调度指令生成行车许可,经由gsm-r(globalsystem for mobile communications–railway)发送给车载设备。车载设备依据列车运行前方的空闲轨道区段长度、行车终点等信息生成的目标―距离制动曲线监控列车运行。
技术实现思路
1、本发明的实施例提供了一种防范制动故障列车追尾前行列车的调控方法,用于解决现有技术中存在的问题。
2、为了实现上述目的,本发明采取了如下技术方案。
3、一种防范制动故障列车追尾前行列车的调控方法,包括:
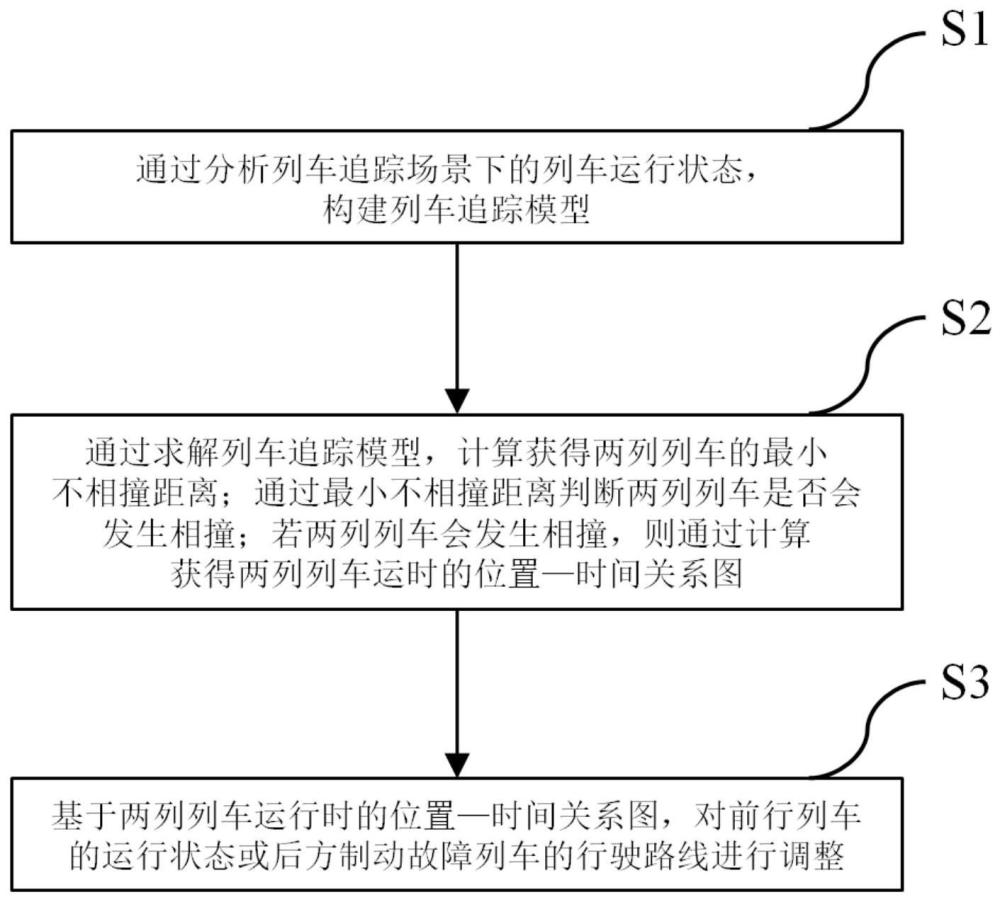
4、s1通过分析列车追踪场景下的列车运行状态,构建列车追踪模型;
5、s2通过求解列车追踪模型,计算获得两列列车的最小不相撞距离;通过最小不相撞距离判断两列列车是否会发生相撞;若两列列车会发生相撞,则通过计算获得两列列车运行时的位置—时间关系图;
6、两列列车运行时的位置—时间关系图用于获得两列列车的相撞点、两列列车相撞时的速度和两列列车的相撞时间;
7、s3基于两列列车运行时的位置—时间关系图,对前行列车的运行状态或后方制动故障列车的行驶路线进行调整。
8、优选地,步骤s1包括:
9、通过式
10、
11、
12、
13、构建前行列车动力学模型;式(1)中,为前车当前速度,单位为m/s;为下一时刻的速度,单位为m/s;β为前车的加速度使用系数(对应不同加速档位);aah为加速度,m/s2;为速度下所受到的单位阻力,单位为n/kn,iah为前车所经区段的平均坡度;γah为前车的回转系数;式(2)中,为前车最大的运行速度;
14、通过式
15、
16、
17、
18、构建后方制动故障列车动力学模型;式(4)中,为后车当前速度,单位为m/s;为下一时刻的速度,单位为m/s;ξ为后车制动力使用系数;f为后车制动失效系数;abe为减速度,单位为m/s2;为速度下所受到的单位阻力,单位为n/kn;ibe为后车所经区段的平均坡度;γbe为后车的回转系数;式(5)中,为后车在减速前的运行速度。
19、优选地,步骤s2包括:
20、通过式
21、
22、确认两列列车的速度和位置关系;
23、通过式
24、
25、预测计算两列列车在速度相同时的位置间隔sin;位置间隔sin为最小不相撞距离;如果位置间隔sin大于零,则两车在不会相撞;如果位置间隔sin小于零,则两车会发生追尾相撞事故;
26、若通过判断获得两列列车会发生相撞,则通过求解式
27、
28、获得两列列车具体相撞点位置坐标;根据调度系统计算预测的两车运行时的速度时间位置等数据,以追尾相撞时刻前车的位置为基准,反向逐个比较列车位置点,直至位置差sin等于零或第一次小于零,记下此时刻的位置、时间;通过此种对比方案,获得两辆列车相撞位置点处的具体信息。
29、优选地,步骤s3包括:
30、若通过判断获知两列列车会发生相撞,则基于两列列车运行时的位置—时间关系图,以及两列列车的追踪场景的类型,对前行列车的运行状态或后方制动故障列车的行驶路线进行调整;具体包括:
31、若前行列车处于启动加速阶段,则通过调度使得前行列车停止牵引加速,并通过调度使得后方制动故障列车改变行驶股道;若前行列车在停车股道上并未启动,则通过调度命令前行列车停留在原位不得前行,并通过调度使得后方制动故障列车改变行驶股道;
32、若前行列车处于匀速出站阶段,则通过调度增加前行列车的牵引力,使得两列列车之间的间隔增大;
33、若前行列车处于站间行驶阶段,则通过调度增加前行列车的牵引力;具体包括:
34、s31调度系统通过求解列车追踪模型,计算获得前行列车的增加牵引力之后的两车的最小不相撞距离,判断两列列车是否会发生相撞;
35、s32若预测两列列车会相撞,则执行子步骤s33;若预测两列列车不会相撞,则直接以前行列车当前牵引力输出数值为新牵引力数值,并执行子步骤s36;
36、s33增加前行列车的牵引力,计算前行列车在新牵引力下的最小不相撞距离是否大于零;
37、s34若前行列车在新牵引力下的最小不相撞距离大于零,则执行子步骤s36;
38、s35若前行列车在新牵引力下的最小不相撞距离小于零;则执行子步骤s33,直至前行列车的牵引力被增加到最大;
39、s36调度系统以新牵引力数值为准下达调度命令,使得前行列车牵引力实际输出数值须保持或大于新牵引力数值;
40、优选地,步骤s3中,通过调度使得前行列车停止牵引加速的过程还包括:
41、当前行列车停稳时,若该前行列车的停车点超过了股道警冲标,则通过调度向该前行列车施加反向牵引力,使得该前行列车回退至原停车股道;若该前行列车的停车点未超过股道警冲标,在后方制动故障列车停稳之前,通过调度命令前行列车停留在当前位置不得前行。
42、由上述本发明的实施例提供的技术方案可以看出,本发明提供一种防范制动故障列车追尾前行列车的调控方法,包括:通过分析列车追踪场景下的列车运行状态,构建列车追踪模型;通过求解列车追踪模型,计算获得两列列车的最小不相撞距离;通过最小不相撞距离判断两列列车是否会发生相撞,若是,则通过计算获得两列列车运行时的位置—时间关系图;基于两列列车运行时的位置—时间关系图,对前行列车的运行状态或后方制动故障列车的行驶路线进行调整。本发明通过建立含有失效系数的牵引—制动模型,量化了两车在位移以及速度不断变化情况下的追踪细节;然后给出了在列车制动失效场景下,调度系统的计算策略。本发明提供的方法为调度系统编排应急预案提供了设计依据,进一步完善了列车安全运行体系。
43、本发明附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!