一种运动型实用汽车用带有辅助侧翼的收展式尾翼的制作方法
1.本发明涉及汽车技术领域,特别涉及一种运动型实用汽车用带有辅助侧翼的收展式尾翼。
背景技术:
2.现有suv上的翼板,属于汽车空气动力套件中的一部分,主要作用是为了减少车辆尾部的升力,汽车尾翼在汽车高速行驶时,使空气阻力形成一个向下的压力,现有翼板固定安装在汽车尾部,减小空气阻力的作用较小,不可收,比较占空间,而且翼板较小,汽车尾翼的作用较小。
技术实现要素:
3.本发明的目的在于针对现有技术的不足,提供一种运动型实用汽车用带有辅助侧翼的收展式尾翼。
4.为解决上述问题,本发明提供以下技术方案:
5.一种运动型实用汽车用带有辅助侧翼的收展式尾翼,所述汽车的尾端设置有用于容纳收展式尾翼的容纳槽,所述收展式尾翼包括有翼板、用于驱动翼板升降的主驱动机构、两个辅助侧翼和用于驱动辅助侧翼绕翼板转动的次驱动机构,两个辅助侧翼分别通过连杆机构与翼板的两端传动配合,所述主驱动机构包括有双头驱动电机和若干个分布在双头驱动电机两端旁侧的顶推杆,顶推杆上滑动配合有滑动组件,所述双头驱动电机的两端均设置有丝杆,所有滑动组件分别与两个丝杆传动配合,所述次驱动机构包括有两个分别与两个连杆机构联动配合的联动杆和能够拉动两个联动杆对向移动的驱动组件。
6.优选的,每个所述滑动组件均包括有安装在容纳槽内的滑道、与丝杆传动配合的连接块和若干个转动安装在连接块上的推动辊,每个滑道上滑动配合有滑动座,所有顶推杆的一端均通过与车身方向平行的铰接轴与所有滑动座铰接,所有顶推杆的另一端均通过与铰接轴平行的转动轴与翼板的底部铰接,所有推动辊均通过连接轴与连接块转动配合,每个推动辊均抵触在对应的顶推杆的侧面,所有连接轴轴线均与铰接轴的轴线平行。
7.优选的,所述驱动组件包括有旋转电机、旋转齿轮和两个分别与连杆机构联动配合的拉动杆,所述旋转电机通过固定座固定在翼板的底部,所述旋转齿轮通过旋转轴与翼板的底部转动配合,两个拉动杆的一端均与旋转齿轮的偏心处转动配合,所述旋转电机的输出轴上安装有与旋转齿轮啮合的主动齿轮。
8.优选的,所述连杆机构包括有两个连杆组件,每个所述连杆组件均包括有第一转动座、两个转动杆和第二转动座,每个连杆组件的第二转动座均固定在辅助侧翼上,每个第一转动座上转动安装有两个与铰接轴轴线平行的第一衔接轴,每个第二转动座上转动安装有两个与铰接轴轴线平行的第二衔接轴,每个两个转动杆的一端分别与对应的第一转动座上的两个衔接轴转动配合,该两个转动杆的另一端转动连接有l形连接杆,该两个转动杆的另一端均与l型连接杆的半段转动配合,l型连接杆远离第一转动座的一端与第二转动座的
第二衔接轴转动配合,每个第一转动座其中靠近翼板中心的转动杆远离衔接轴的一端通过拉动轴与拉动杆的一端转动配合,该第一转动座其中远离翼板中心的转动杆远离衔接轴的一端转动安装有第一衔接杆,第二转动座远离l型连接杆的第二衔接轴转动安装有第二衔接杆,所述第一衔接杆的一端与第二衔接杆的一端转动连接。
9.优选的,所述旋转电机和双头驱动电机的两端均安装有角度传感器,所述旋转电机电性连接有控制器,所有角度传感器均与控制器电性连接。
10.优选的,所述拉动轴的中心线与铰接轴轴线平行,与第一转动座转动连接的两个转动杆相互平行,所有第一衔接轴和所有第二衔接轴轴线均与铰接轴轴线平行。
11.优选的,所有所述第二衔接杆与第二转动座铰接的一端均设置有弯曲段。
12.优选的,所有所述顶推杆均为方形杆,所述顶推杆的宽度与推动辊的宽度相同。
13.有益效果:本发明的一种运动型实用汽车用带有辅助侧翼的收展式尾翼,具有以下优点:
14.其一:主驱动机构驱动所有顶推杆由倾斜的八字形状态和至竖直状态转换,从而使得翼板升降,能够将翼板收起来,避免占用空间。
15.其二:次驱动机构能够驱动两个朝下的辅助侧翼旋转向上,辅助侧翼能够提高减少车辆尾部的升力的作用。
附图说明
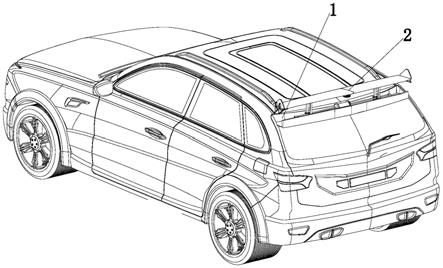
16.图1为本发明在汽车上升起状态的立体结构示意图;
17.图2为本发明在汽车上收回状态的立体结构示意图;
18.图3为本发明的立体结构示意图一;
19.图4为本发明的立体结构示意图二;
20.图5为本发明主驱动机构的立体结构示意图;
21.图6为图5的a处放大图;
22.图7为本发明连杆机构的立体结构示意图;
23.附图标记说明:容纳槽1,收展式尾翼2,翼板3,主驱动机构4,双头驱动电机41,丝杆42,顶推杆43,辅助侧翼5,次驱动机构6,旋转电机61,拉动杆62,主动齿轮63,旋转齿轮64,连杆机构7,第一转动座71,第一衔接轴72,第二转动座73,第二衔接轴74,l形连接杆75,第一衔接杆76,第二衔接杆77,,弯曲段78,滑动组件8,滑道81,连接块82,推动辊83,滑动座84,铰接轴85,连接轴86,拉动轴87,转动杆88。
具体实施方式
24.下面结合说明书附图和实施例,对本发明的具体实施例做进一步详细描述:
25.参照图1至图7所示的一种运动型实用汽车用带有辅助侧翼的收展式尾翼,所述汽车的尾端设置有用于容纳收展式尾翼2的容纳槽1,所述收展式尾翼2包括有翼板3、用于驱动翼板3升降的主驱动机构4、两个辅助侧翼5和用于驱动辅助侧翼5绕翼板3转动的次驱动机构6,两个辅助侧翼5分别通过连杆机构7与翼板3的两端传动配合,所述主驱动机构4包括有双头驱动电机41和若干个分布在双头驱动电机41两端旁侧的顶推杆43,顶推杆43上滑动配合有滑动组件8,所述双头驱动电机41的两端均设置有丝杆42,所有滑动组件8分别与两
个丝杆42传动配合,所述次驱动机构6包括有两个分别与两个连杆机构7联动配合的联动杆和能够拉动两个联动杆对向移动的驱动组件。
26.旋转电机61和双头驱动电机41同时旋转,双头驱动电机41驱动两个丝杆42旋转,使得双头驱动电机41两侧的连接块82均朝向双头驱动电机41移动,带动所有滑动组件8推动所有顶推杆43由八字形状态旋转至竖直状态,使得整个翼板3、次驱动机构6和所有辅助侧翼5升起,旋转电机61带动旋转齿轮64正向旋转,推动两个拉动杆62沿着翼板3长度方向背向移动,推动连杆机构7带动辅助侧翼5旋转向上竖直状态。
27.旋转电机61和双头驱动电机41同时旋转,双头驱动电机41驱动两个丝杆42反向旋转,使得双头驱动电机41两侧的连接块82均背向双头驱动电机41移动,带动所有滑动组件8推动所有顶推杆43由竖直状态旋转至八字形状态,使得整个翼板3、次驱动机构6和所有辅助侧翼5下降,旋转电机61带动旋转齿轮64反向旋转,拉动两个拉动杆62沿着翼板3长度方向对向移动,拉动连杆机构7带动辅助侧翼5旋转朝下状态。
28.每个所述滑动组件8均包括有安装在容纳槽1内的滑道81、与丝杆42传动配合的连接块82和若干个转动安装在连接块82上的推动辊83,每个滑道81上滑动配合有滑动座84,所有顶推杆43的一端均通过与车身方向平行的铰接轴85与所有滑动座84铰接,所有顶推杆43的另一端均通过与铰接轴85平行的转动轴与翼板3的底部铰接,所有推动辊83均通过连接轴86与连接块82转动配合,每个推动辊83均抵触在对应的顶推杆43的侧面,所有连接轴86轴线均与铰接轴85的轴线平行,双头驱动电机41驱动两个丝杆42正向旋转,使得双头驱动电机41两侧的连接块82均朝向双头驱动电机41移动,带动所有滑动组件8推动所有顶推杆43的底端随着滑动座84朝向双头驱动电机41移动,使得所有顶推杆43由八字形状态旋转至竖直状态,使得整个翼板3、次驱动机构6和所有辅助侧翼5升起。
29.所述驱动组件包括有旋转电机61、旋转齿轮64和两个分别与连杆机构7联动配合的拉动杆62,所述旋转电机61通过固定座固定在翼板3的底部,所述旋转齿轮64通过旋转轴与翼板3的底部转动配合,两个拉动杆62的一端均与旋转齿轮64的偏心处转动配合,所述旋转电机61的输出轴上安装有与旋转齿轮64啮合的主动齿轮63,
30.旋转电机61驱动主动齿轮63旋转带动旋转齿轮64正向旋转,推动两个拉动杆62沿着翼板3长度方向背向移动,推动连杆机构7带动辅助侧翼5旋转向上竖直状态。
31.旋转电机61带动旋转齿轮64反向旋转,拉动两个拉动杆62沿着翼板3长度方向对向移动,拉动连杆机构7带动辅助侧翼5旋转朝下状态。
32.所述连杆机构7包括有两个连杆组件,每个所述连杆组件均包括有第一转动座71、两个转动杆88和第二转动座73,每个连杆组件的第二转动座73均固定在辅助侧翼5上,每个第一转动座71上转动安装有两个与铰接轴85轴线平行的第一衔接轴72,每个第二转动座73上转动安装有两个与铰接轴85轴线平行的第二衔接轴74,每个两个转动杆88的一端分别与对应的第一转动座71上的两个衔接轴转动配合,该两个转动杆88的另一端转动连接有l形连接杆75,该两个转动杆88的另一端均与l型连接杆的半段转动配合,l型连接杆远离第一转动座71的一端与第二转动座73的第二衔接轴74转动配合,每个第一转动座71其中靠近翼板3中心的转动杆88远离衔接轴的一端通过拉动轴87与拉动杆62的一端转动配合,该第一转动座71其中远离翼板3中心的转动杆88远离衔接轴的一端转动安装有第一衔接杆76,第二转动座73远离l型连接杆的第二衔接轴74转动安装有第二衔接杆77,所述第一衔接杆76
的一端与第二衔接杆77的一端转动连接,所述l形连接杆75有两段半杆,其中一个半杆的两端同时与两个转动杆88一端转动配合,另一个半杆的一端与一个转动杆88的一端转动连接,该半杆的另一端与第二转动座73的第二衔接轴74转动连接。
33.拉动杆62拽动拉动轴87靠近旋转齿轮64,使得所有转动杆88绕第一衔接轴72顺时针旋转,使得l形连接杆75和第一衔接杆76拉动辅助侧翼5旋转至朝下的状态。
34.拉动杆62推动动拉动轴87远离旋转齿轮64,使得所有转动杆88绕第一衔接轴72逆时针旋转,使得l形连接杆75和第一衔接杆76推动辅助侧翼5旋转至竖直朝上的状态。
35.所述旋转电机61和双头驱动电机41的两端均安装有角度传感器,所述旋转电机61电性连接有控制器,所有角度传感器均与控制器电性连接,角度传感器的型号为0-5v的ssa00xxh2-v005,所述控制器图中未显示采用可编程逻辑控制器,是一种具有微处理器的用于自动化控制的数字运算控制器,可以将控制指令随时载入内存进行储存与执行,可编程逻辑控制器为现有技术,此处不必详述,可编程逻辑控制器的型号为simatic s7-400。
36.所述拉动轴87的中心线与铰接轴85轴线平行,与第一转动座71转动连接的两个转动杆88相互平行,所有第一衔接轴72和所有第二衔接轴74轴线均与铰接轴85轴线平行,所有所述第二衔接杆77与第二转动座73铰接的一端均设置有弯曲段78,拉动杆62拽动拉动轴87靠近旋转齿轮64,使得所有转动杆88绕第一衔接轴72顺时针旋转,使得l形连接杆75的两个半杆之间的夹角为最大,第一衔接杆76拉动辅助侧翼5旋转至朝下的状态。
37.拉动杆62推动动拉动轴87远离旋转齿轮64,使得所有转动杆88绕第一衔接轴72逆时针旋转,使得l形连接杆75的两个半杆之间的夹角为最小,使得l形连接杆75和第一衔接杆76推动辅助侧翼5旋转至竖直朝上的状态。
38.所有所述顶推杆43均为方形杆,所述顶推杆43的宽度与推动辊83的宽度相同,避免推动辊83在顶推杆43上的偏移。
39.工作原理:
40.升起状态:旋转电机61和双头驱动电机41同时启动,双头驱动电机41驱动两个丝杆42旋转,使得双头驱动电机41两侧的连接块82均朝向双头驱动电机41移动,带动所有滑动组件8推动所有顶推杆43由八字形状态旋转至竖直状态,当角度传感器检测到双头驱动电机41的输出轴旋转角度达到预设值的时候,传送一个电信号x1给控制器,控制器控制双头驱动电机41停止旋转,使得整个翼板3、次驱动机构6和所有辅助侧翼5升起,旋转电机61带动旋转齿轮64正向旋转,推动两个拉动杆62沿着翼板3长度方向背向移动,推动连杆机构7带动辅助侧翼5旋转向上竖直状态,当角度传感器检测到旋转电机61的输出轴旋转角度达到预设值的时候,传送一个电信号x2给控制器,控制器控制旋转电机61停止旋转。
41.降回状态:旋转电机61和双头驱动电机41同时反向旋转,双头驱动电机41驱动两个丝杆42反向旋转,使得双头驱动电机41两侧的连接块82均背向双头驱动电机41移动,带动所有滑动组件8推动所有顶推杆43由竖直状态旋转至八字形状态,当角度传感器检测到双头驱动电机41的输出轴旋转角度达到预设值的时候,传送一个电信号x3给控制器,控制器控制双头驱动电机41停止旋转,使得整个翼板3、次驱动机构6和所有辅助侧翼5下降,旋转电机61带动旋转齿轮64反向旋转,拉动两个拉动杆62沿着翼板3长度方向对向移动,拉动连杆机构7带动辅助侧翼5旋转朝下状态,当角度传感器检测到旋转电机61的输出轴旋转角度达到预设值的时候,传送一个电信号x4给控制器,控制器控制旋转电机61停止旋转。
42.以上所述,仅是本发明的较佳实施例而已,并非对本发明的技术范围作出任何限制,故凡是依据本发明的技术实质对以上实施例所作的任何细微修改、等同变化与修饰,均仍属于本发明的技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1