一种摆轮式曲面自适应爬壁机器人的制作方法
1.本发明涉及一种摆轮式曲面自适应爬壁机器人,属于爬壁机器人技术领域。
背景技术:
2.爬壁机器人是可以在垂直壁面上攀爬并完成作业的自动化机器人。爬壁机器人又称为壁面移动机器人,因为垂直壁面作业超出人的极限,因此在国外又称为极限作业机器人。随着安全责任意识的不断提高,爬壁机器人应用的也越来越广泛。比如:用于石化企业对圆柱形大罐进行探伤检查或喷漆处理;对建筑物进行清洁和油漆喷涂;在核工业中用来检查测厚;在造船行业对船体进行焊接等。
3.目前,绝大多数的磁性吸附爬壁机器人只能适应平滑或者曲率半径很大的壁面。有些能够一定程度上适应曲面的爬壁机器人存在转弯不灵活、存在硬滑动摩擦等问题,继而产生位置精度不易保证,性能不够稳定等问题。
技术实现要素:
4.针对上述问题,本发明要解决的技术问题是提供一种摆轮式曲面自适应爬壁机器人。
5.本发明的摆轮式曲面自适应爬壁机器人,它包含机架、摆动式驱动轮组、机舱盖板、机舱和尾轮,所述机架前部设置有两组摆动式驱动轮组,且机架中部设置有机舱,所述机舱上部设置有机舱盖板,所述机架后部设置有凹形缺口结构,且凹形缺口结构内设置有尾轮;
6.所述摆动式驱动轮组包含减速电机驱动、第一轮架板、紧固板、驱动轴、第二轮架板、端盖、轴承、第三轮架板、轴套、销轴、第四轮架板和磁性爬壁轮,所述减速电机驱动的输出端通过驱动轴与性爬壁轮连接,所述性爬壁轮四周设置有第一轮架板、第二轮架板、第三轮架板和第四轮架板,所述驱动轴贯穿第一轮架板、磁性爬壁轮和第三轮架板,且驱动轴与第三轮架板之间设置有轴承,所述轴承外部设置有端盖,所述第一轮架板、第二轮架板、第三轮架板和第四轮架板之间通过紧固板连接固定,且第二轮架板、第四轮架板与机架之间通过轴套、销轴固定;
7.所述尾轮包含轮轴螺母、全向轮、永磁体、尾轮轴套和尾轮轴,所述全向轮设有两组,且两组全向轮之间设置有永磁体,两组全向轮和永磁体通过尾轮轴、轮轴螺母与机架固定,所述尾轮轴与机架连接处设置有尾轮轴套。
8.优选的,所述磁性爬壁轮采用宽体轮结构。
9.优选的,所述减速电机驱动采用蜗轮蜗杆减速电机、行星式减速电机或平行轴减速电机,减速电机驱动的输出轴为空心轴或实心轴,实心轴并通过联轴器与驱动轴连接。
10.优选的,所述尾轮采用全向轮加永磁体组合轮方式,永磁体外径小于全向轮直径。
11.与现有技术相比,本发明的有益效果是:该摆轮式曲面自适应爬壁机器人结构简单,设计合理,前侧双轮采用轮心部位摆动结构,尾轮为从动全向轮组,具有转向时机器中
心位置稳定,轮组踏面与壁面无相对滑移,并能适应各种大小曲率壁面等特点,具有卓越的性能。
附图说明
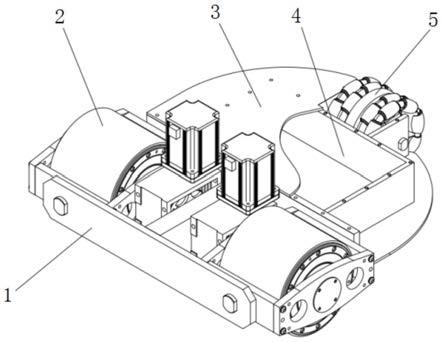
12.图1为本发明的整体结构示意图;
13.图2为本发明的整体结构剖视图;
14.图3为本发明的摆动式驱动轮组爆炸结构示意图;
15.图4为本发明的工作状态图。
16.附图标记:机架1、摆动式驱动轮组2、减速电机驱动201、第一轮架板202、紧固板203、驱动轴204、第二轮架板205、端盖206、轴承207、第三轮架板208、轴套209、销轴210、第四轮架板211、磁性爬壁轮212、机舱盖板3、机舱4、尾轮5、轮轴螺母501、全向轮502、永磁体503、尾轮轴套504、尾轮轴505。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.如图1-图4所示,本具体实施方式采用以下技术方案:它包含机架1、摆动式驱动轮组2、机舱盖板3、机舱4和尾轮5,机架1前部设置有两组摆动式驱动轮组2,且机架1中部设置有机舱4,机舱4上部设置有机舱盖板3,机架1后部设置有凹形缺口结构,且凹形缺口结构内设置有尾轮5,机舱4用于安装控制器件,机架1的结构型式可以根据尾轮5的大小、控制器件的大小以及外挂作业装置等需求做灵活变动。
19.摆动式驱动轮组2包含减速电机驱动201、第一轮架板202、紧固板203、驱动轴204、第二轮架板205、端盖206、轴承207、第三轮架板208、轴套209、销轴210、第四轮架板211和磁性爬壁轮212,减速电机驱动201的输出端通过驱动轴204与性爬壁轮212连接,性爬壁轮212四周设置有第一轮架板202、第二轮架板205、第三轮架板208和第四轮架板211,驱动轴204贯穿第一轮架板202、磁性爬壁轮212和第三轮架板208,且驱动轴204与第三轮架板208之间设置有轴承207,轴承207外部设置有端盖206,第一轮架板202、第二轮架板205、第三轮架板208和第四轮架板211之间通过紧固板203连接固定,且第二轮架板205、第四轮架板211与机架1之间通过轴套209、销轴210固定,摆动式驱动轮组2可以适应大范围曲率变化的表面,保证最佳吸附性能,大幅度提高机器人整体负载性能。
20.尾轮5包含轮轴螺母501、全向轮502、永磁体503、尾轮轴套504和尾轮轴505,全向轮502设有两组,且两组全向轮502之间设置有永磁体503,两组全向轮502和永磁体503通过尾轮轴505、轮轴螺母501与机架1固定,尾轮轴505与机架1连接处设置有尾轮轴套504。
21.磁性爬壁轮212采用宽体轮结构,使得摆动式驱动轮组2在磁性吸附力作用下能够保持自立,并且具有很好的抗轴向外负载能力。
22.减速电机驱动201采用蜗轮蜗杆减速电机、行星式减速电机或平行轴减速电机,减速电机驱动201的输出轴为空心轴或实心轴,实心轴并通过联轴器与驱动轴204连接。
23.尾轮5采用全向轮502加永磁体503组合轮方式,永磁体503外径小于全向轮502直径,该结构能够满足机器人任意方向行走、转向且不造成任何牵制阻碍。
24.工作原理:爬壁机器人采用3轮结构,前两组轮为独立驱动摆动轮组,尾轮5采用加磁全向轮结构,为从动轮组,3个轮组均通过销轴与异形机架相连接,稳定的3点支撑结构,基于全向轮502结构的尾轮5可以让机器人旋转几何中心准确稳定,满足高精度姿态调整需求,工作时,机器人通过摆动式驱动轮组2的磁性爬壁轮212和尾轮5中永磁体503的吸附作用吸附在钢制壁面上,形成3点稳定支撑结构。摆动式驱动轮组2采用独立驱动型式,实现爬壁机器人的任意方向爬行、转弯等功能,尾轮5中的全向轮502能够任意方向运动,对爬壁机器人的转弯动作不造成任何牵制卡阻。壁面曲率变化时,两组摆动式驱动轮组2相对机架1可以相对摆动,并始终保证磁性爬壁轮处于最佳附着状态。
25.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1