一种勾爪式攀爬机器人机械式吸盘机构的制作方法
[0001]
本发明涉及一种勾爪式攀爬机器人机械式吸盘机构,属于核工业检修设备领域。
背景技术:
[0002]
在核工业中,很多情况、环境都具有放射性,特别是在反应堆运行过程中,无法使用人工进行相关的检修操作,所以经常会使用机器人代替人工进行作业,传统的机器人行走方式有履带式、摆臂式,其主要适用于底部表面搬运作业和高空作业,前者虽然可以在狭小空间使用,但是仅能进行地面行走,后者虽然可以高空作业但是无法在狭小空间使用,所以对于一些狭小空间中管道、脚手架、支撑网、栅栏等上层建筑的施工,现有的机器人的运动形式很难胜任;所以对于狭小空间的高空作业,部分公司设计了攀爬机器人,攀爬机器人主要是通过可以收拢或者打开的卡箍或者夹爪实现管道的攀爬,但是对于支撑网、脚手架等攀爬,因为卡箍、夹爪可以提供的摩擦力有限,固定性能也就有限其适应性就较差。
技术实现要素:
[0003]
本发明要解决的技术问题是:克服现有技术中机器人运动形式无法胜任狭小空间高空作业且现有攀爬机器人可攀爬表面有限的技术问题,提供一种勾爪式攀爬机器人机械式吸盘机构。
[0004]
本发明解决其技术问题所采用的技术方案是:一种勾爪式攀爬机器人机械式吸盘机构,包括,翻板组件,翻板组件包括中间板和转动连接于中间板两侧的转动翻板;勾爪机构,勾爪机构分为三组,三组分别设置于中间板中部和转动翻板中部;其中每组勾爪机构均包括至少两个沿中间板或转动翻板直线阵列布置的勾爪组件;翻板机构,翻板机构包括设置于中间板上的主连接座,在主连接座的中部同轴固定有一个与中间板轴线同轴的中部支撑轴,在中部连接轴的径向轴线两端分别连接有一个直线推动机构a,在两侧的转动翻板上各设置有一个副连接座,直线推动机构a的直线伸缩端通过连杆与副连接座转动连接;勾爪组件,在中间板、转动翻板上设置有安装孔,其中在安装孔的底部转动连接有一个勾爪连接座,勾爪组件包括勾爪和驱动块,驱动块为球块状结构,驱动块转动连接到勾爪连接座上,驱动块一体连接到勾爪上,在驱动块的顶端设置有一个推动平面;勾爪摆动组件,勾爪摆动组件包括一个旋转座,旋转座安装于中间板、转动翻板表面且与安装孔同轴,在旋转座中部转动连接有一个旋转驱动块,在旋转驱动块的底部固定连接有一个直线推动机构b,直线推动机构b相对旋转驱动块偏心布置,直线推动机构b的直线推杆与推动平面接触;在旋转驱动块和勾爪连接座之间设置有一个同步连接块,同步连接块的两端分别与旋转驱动块和勾爪连接座固定连接,直线推杆穿过同步连接块,在同步连接块上还偏心连接有一个回位推杆组件,回位推杆组件包括一个与同步连接块通过舒张弹簧
连接的回位推杆,回位推杆的端部与推动平面接触,回位推杆的轴线与直线推杆的轴线相对同步连接块的轴线镜像对称布置;勾爪旋转组件,勾爪旋转组件包括固定于中间板、转动翻板上的旋转驱动机构,在旋转驱动机构的旋转轴上直线阵列固定有若干驱动链轮,在所述旋转驱动块的顶端同轴固定有一个从动链轮,驱动链轮与从动链轮之间通过链条传动。
[0005]
作为本发明的进一步改进,中间板和转动翻板之间设置有扩展铰链板,扩展铰链板通过扩展铰链与中间板、转动翻板活动连接,所述扩展铰链沿扩展铰链板直线阵列设置,所述扩展铰链包括设置于中间板、转动翻板横向端部的转动连接槽,在中间板、转动翻板对应转动连接槽的设置位置贯穿设置有一个铰链轴,在扩展铰链的横向端部设置有一个嵌入到转动连接槽内的连接块,连接块内设置有长度大于铰链轴直径的浮动轴孔,铰链轴贯穿浮动轴孔。
[0006]
作为本发明的进一步改进,在连接块的横向两侧对应浮动轴孔的位置设置有一个滑动垫圈,在转动连接槽的轴向两侧分别通过支撑弹簧连接有一个支撑垫圈,滑动垫圈与支撑垫圈之间滑动接触。
[0007]
作为本发明的进一步改进,所述勾爪连接座包括一个与安装孔转动连接的活动连接套,在活动连接套的顶部固定有一个活动压板,活动连接套与活动压板之间设置一个球状的转动空腔,驱动块嵌入到转动空腔内,在活动压板、活动连接套之间还夹持有一个定角度轴,定角度轴贯穿驱动块并与驱动块转动连接。
[0008]
作为本发明的进一步改进,同步连接块中设置有一个滑动孔,在滑动孔内壁设置有一个滑动衬套,所述直线推杆与滑动衬套之间滑动连接。
[0009]
作为本发明的进一步改进,在所述直线推杆的端部通过球铰连接机构连接一个推动块,推动块底部设置有一个挤压平面,挤压平面与推动平面滑动接触。
[0010]
作为本发明的进一步改进,主连接座的中部同轴固定有一个旋转气缸,中部支撑轴同轴连接于旋转气缸的旋转轴上。
[0011]
本发明的有益效果是:1、本发明通过可开启和收紧的勾爪,配合以转动机构设计了一套攀爬机器人使用的类吸盘机构,同时可以配合以铁网、脚手架、多孔隔离网,实现机器人的稳定固定和高效攀爬。
[0012]
2、本发明通过可开启和收紧的勾爪,可以在任意情况下,以任意角度、和开度夹紧到隔离网等结构上,进行攀爬和固定,同时也发明的勾爪可以在0-180
°
区间内打开和夹紧,所以也可以适应于一些小型管道的夹持,同时提供较大的摩擦力和固定效果。
[0013]
3、扩展铰链板可以降低中间板和转动翻板在转动时的干涉,因为转动的连接铰链收到其自身结构影响,其最大转动角度容易首先,但是增加了可以拉长的扩展铰链结构,就可以大大的降低中间板和转动翻板的互相干涉,提供更大的转动空间,以适应更多的使用场景。
[0014]
4、滑动垫圈可以降低中间板、转动翻板和扩展铰链板之间互相拉长或者收拢时的互相摩擦,提升设备的使用寿命。
[0015]
5、勾爪连接座为可开启的结构,可以根据不同使用场景更换不同规格的勾爪,此外定角度轴可以防止勾爪自由定轴旋转。
[0016]
6、驱动块的推动平面与直线推杆直线呈一定夹角,在直线推杆推挤过程中,夹角
带来的分力会使得直线推杆受一定的弯矩,而滑动孔内的滑动衬套可以辅助支撑直线推杆,防止直线推杆的弯曲。
[0017]
7、推动块可以提升直线推杆与推动平面的接触面积,降低局部压强,从而推动平面的磨损,提升结构的寿命。
[0018]
8、旋转气缸可以控制两组转动翻板与中间板的最大角度,提升设备的适用性。
附图说明
[0019]
下面结合附图和实施例对本发明进一步说明。
[0020]
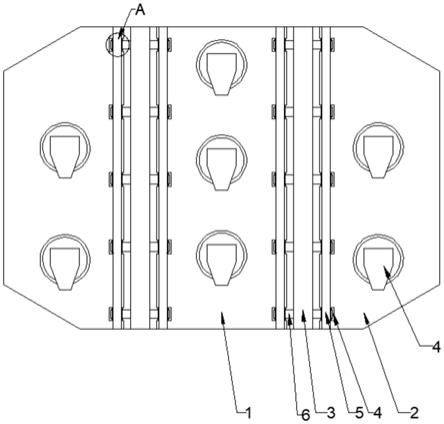
图1是本发明勾爪的布置示意图;图2是勾爪旋转组件的布置示意图;图3是勾爪旋转组件的示意图;图4是勾爪摆动组件的示意图;图5是翻板机构的示意图;图6是图1中a处的局部放大图。
[0021]
图中:1、中间板;2、转动翻板;3、扩展铰链板;4、勾爪机构;5、铰链轴;6、连接块;7、主连接座;8、中部支撑轴;9、直线推动机构a;10、连杆;11、副连接座;12旋转驱动机构、;13、驱动链轮;14、从动链轮;15、旋转座;16、旋转驱动块;17、直线推动机构b;18、活动连接套;19、活动压板;20、驱动块;21、勾爪连;22、定角度轴;23、直线推杆;24、滑动衬套;25、回位推杆组件;26、推动块;27、同步连接块;28、滑动垫圈;29、支撑垫圈;30支撑弹簧;31、浮动轴孔。
具体实施方式
[0022]
现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
[0023]
如图1所示,本发明一种勾爪式攀爬机器人机械式吸盘机构,包括,如图5和图1,翻板组件,翻板组件包括中间板和转动连接于中间板两侧的转动翻板;如图1,勾爪机构,勾爪机构分为三组,三组分别设置于中间板中部和转动翻板中部;其中每组勾爪机构均包括至少两个沿中间板或转动翻板直线阵列布置的勾爪组件;如图5,翻板机构,翻板机构包括设置于中间板上的主连接座,主连接座的中部同轴固定有一个旋转气缸,旋转气缸的旋转轴上设置有一个中部支撑轴,中部连接轴的径向轴线两端分别连接有一个气缸构成的直线推动机构a,在两侧的转动翻板上各设置有一个副连接座,直线推动机构a的直线伸缩端通过连杆与副连接座转动连接;如图1,勾爪组件,在中间板、转动翻板上设置有安装孔,其中在安装孔的底部转动连接有一个勾爪连接座,勾爪组件包括勾爪和驱动块,驱动块为球块状结构,驱动块转动连接到勾爪连接座上,所述勾爪连接座包括一个与安装孔转动连接的活动连接套,在活动连接套的顶部固定有一个活动压板,活动连接套与活动压板之间设置一个球状的转动空腔,驱动块嵌入到转动空腔内,在活动压板、活动连接套之间还夹持有一个定角度轴,定角度轴贯穿驱动块并与驱动块转动连接,驱动块一体连接到勾爪上,在驱动块的顶端设置有一个推动
平面;如图4,勾爪摆动组件,勾爪摆动组件包括一个旋转座,旋转座安装于中间板、转动翻板表面且与安装孔同轴,在旋转座中部转动连接有一个旋转驱动块,在旋转驱动块的底部固定连接有一个直线推动机构b,直线推动机构b相对旋转驱动块偏心布置,直线推动机构b的直线推杆的端部通过球铰连接机构连接一个推动块,推动块底部设置有一个挤压平面,挤压平面与推动平面滑动接触;在旋转驱动块和勾爪连接座之间设置有一个同步连接块,同步连接块的两端分别与旋转驱动块和勾爪连接座固定连接,直线推杆穿过同步连接块,在同步连接块上还偏心连接有一个回位推杆组件,回位推杆组件包括一个与同步连接块通过舒张弹簧连接的回位推杆,回位推杆的端部与推动平面接触,回位推杆的轴线与直线推杆的轴线相对同步连接块的轴线镜像对称布置,同步连接块中设置有一个滑动孔,在滑动孔内壁设置有一个滑动衬套,所述直线推杆与滑动衬套之间滑动连接;如图3,勾爪旋转组件,勾爪旋转组件包括固定于中间板、转动翻板上的旋转驱动机构,在旋转驱动机构的旋转轴上直线阵列固定有若干驱动链轮,在所述旋转驱动块的顶端同轴固定有一个从动链轮,驱动链轮与从动链轮之间通过链条传动。
[0024]
如图1和图6,中间板和转动翻板之间设置有扩展铰链板,扩展铰链板通过扩展铰链与中间板、转动翻板活动连接,所述扩展铰链沿扩展铰链板直线阵列设置,所述扩展铰链包括设置于中间板、转动翻板横向端部的转动连接槽,在中间板、转动翻板对应转动连接槽的设置位置贯穿设置有一个铰链轴,在扩展铰链的横向端部设置有一个嵌入到转动连接槽内的连接块,连接块内设置有长度大于铰链轴直径的浮动轴孔,铰链轴贯穿浮动轴孔;在连接块的横向两侧对应浮动轴孔的位置设置有一个滑动垫圈,在转动连接槽的轴向两侧分别通过支撑弹簧连接有一个支撑垫圈,滑动垫圈与支撑垫圈之间滑动接触。
[0025]
使用时,首先如图1和图5,根据攀爬表面的弧度角度等需求,通过直线推动机构a推动连杆摆动,从而带动转动翻板相对中间板摆动,同时为了提升最大摆动角度,扩展铰链板的补充实现了转动翻板相对中间板的活动连接,而中间铰链轴可以相对浮动轴孔自由移动,所以进一步实现了铰链的伸缩,进一步提升摆动空间;在摆动完成后,锁死直线推动机构a的气缸,实现角度锁定,随后根据受力角度,通过勾爪旋转组件,如图2和图3,通过旋转驱动机构的旋转,通过链条带动从动链轮旋转,从而带动如图4中,旋转驱动块、同步连接块、勾爪连接座的同步旋转,进而实现勾爪角度的调节,调节完成后,在一般状态下,勾爪可以直接插入到网孔中,实现攀爬固定;但是如果是稳定作业,则可以通过驱动气缸构成的直线推动机构b,推动直线推杆移动,进而推挤推动平面,使得推动块相对推动平面滑动,使得驱动块发生偏转,进而带动勾爪摆动,实现勾爪相对隔离网等物体的夹紧固定;从而实现整个攀爬机构的类吸盘机构的固定;当直线推动机构b放松后,通过回位推杆组件,使得勾爪松开。
[0026]
以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1