一种汽车停车自动回正装置及方法
uno控制板的5v引脚、gnd引脚和a2引脚连接;所述发光二极管的正极与arduino uno控制板的d7引脚连接,其负极通过限流电阻接地;所述蜂鸣器的正极端子与arduino uno控制板的d4引脚连接,其负极接地;所述电磁换向阀的+vs端子、gnd端子和v端子分别与arduino uno控制板的d3引脚、gnd引脚和d2引脚连接。
12.作为一种优选,所述电磁换向阀为三位四通换向阀;其工作在左位时,其p口和a口之间的气路连通,其s口与b口之间的气路连通;其工作在中位时,其p口、a口、b口和s口均截止;其工作在右位时,其p口与b口之间的也路连通,其s口与a口之间的气路连通。
13.进一步,为了保证动作的稳定性和可靠性,所述电磁换向阀的p口通过定压调节阀与汽车的节气门连接;作为一种优选,所述蜂鸣器为有源蜂鸣器。
14.本发明中,通过行星齿轮机构的设置,能方便的通过旋转气缸来驱动转向转动轴的转动,从而能方便的实现回正作业,也能避免在回正过程中因卡滞而引起的安全隐患。本发明有效的解决了停车后转向轮未回正的问题。
15.本发明还提供了一种汽车停车自动回正方法,包括以下步骤:
16.步骤一:通过ckp/cmp传感器和挡位传感器实时采集曲轴位置信号和挡位信号,在确定挡位处于驻车档且车辆已经处于熄火状态时执行步骤二;
17.步骤二:通过转向盘转矩/角度传感器采集转向传动轴的角度信号,判断车辆是否处于居中回正状态,在处于居中回正状态时不动作,在未居中回正状态时执行步骤三,并控制蜂鸣器进行设定时长的蜂鸣示警,控制发光二极管闪烁报警;
18.步骤三:控制电磁换向阀工作在左位,利用发动机进气管负压作为能源驱动旋转气缸带动涡杆转动,涡杆转动过程中驱动环形齿圈转动,旋转的环形齿圈通过行星齿轮驱动转向传动轴转动,以通过转向传动轴带动转向轮回正;该过程中通过转向盘转矩/角度传感器实时采集转向传动轴转动的角度信号,并根据角度信号获得转向传动轴旋转的角度,在旋转的角度达到回正所需要的角度时完成回正作业,并执行步骤四;
19.步骤四:控制电磁换向阀工作在中位,控制发光二极管熄灭、蜂鸣器停止蜂鸣。
20.本发明通过ckp/cmp传感器和挡位传感器双重信号来进行车辆状态的判断,有效的保证了车辆处于熄火状态的准确判断,能避免因车辆等红灯等因素而导致的误判情况的发生,显著的提高了判断的准确性;通过转向盘转矩/角度传感器实时采集转向传动轴转动的角度信号,可不必专门设置其他传感器,有效的利用了车辆原有的部件,并能提高检测的准确性,同时,降低了该方法的实施成本。通过利用发动机进气管负压作为能源进行回正,不需要消耗车辆的电能,节能环保效果较好;通过行星齿轮机构有效避免机构卡死引起的安全隐患,安全性更高;该方法步骤简单、实现成本低,可行性高,具有良好的应用前景。
附图说明
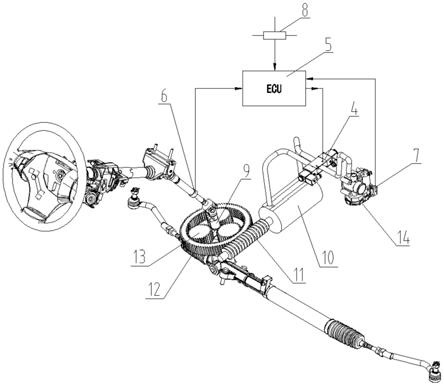
21.图1是发明的结构示意图;
22.图2是本发明中的电路原理图;
23.图3是本发明中回正方法的流程图。
24.图中:1、发光二极管,2、限流电阻,3、蜂鸣器,4、电磁换向阀,5、控制板,6、转向盘转矩/角度传感器,7、ckp/cmp传感器,8、挡位传感器,9、转向传动轴,10、旋转气缸,11、涡杆,12、环形齿圈,13、行星齿轮,14、节气门。
具体实施方式
25.下面结合附图对本发明作进一步说明。
26.如图1和图2所示,一种汽车停车自动回正装置,包括控制板5、转向盘转矩/角度传感器6、ckp/cmp传感器7、挡位传感器8、转向传动轴9、行星齿轮机构、旋转气缸10、涡杆11和电磁换向阀4;
27.所述行星齿轮机构安装在车架上,其包括环形齿圈12、行星齿轮架和多个行星齿轮13,所述环形齿圈12的内部设置有内齿圈,外部设置有外齿圈;多个行星齿轮13通过行星齿轮架可转动的设置在环形齿圈12的内部,且多个行星齿轮13均与环形齿圈12的内齿圈啮合;多个行星齿轮13之间形成太阳轮安装空间;
28.所述转向传动轴9的上段与下段断开,上段的下端为齿轮轴,插装于太阳轮安装空间中,并分别与多个行星齿轮13啮合;转向传动轴9下段的上端与行星齿轮架的中心固定连接,且下段的下端通过万向节与转向器的输入轴连接;
29.所述旋转气缸10安装在车架的下方,且位于行星齿轮机构的一侧;所述涡杆11与旋转气缸10的活塞杆同轴心的设置,涡杆11远离行星齿轮机构的一端与旋转气缸10的活塞杆端部固定连接,其中段与环形齿圈12的外齿圈啮合;
30.所述电磁换向阀4安装在车架上,其p口通过管路与汽车的节气门14连接,其a口和b口分别与旋转气缸10的两个进气口连接;
31.所述控制板5分别与转向盘转矩/角度传感器6、ckp/cmp传感器7、挡位传感器8和电磁换向阀4连接。
32.为了方便进行示警和状态指示,还包括蜂鸣器3和发光二极管1,所述蜂鸣器3和发光二极管1均与控制板5连接,发光二极管1、蜂鸣器3安装在驾驶室内部。
33.作为一种优选,所所述控制板5为arduino uno控制板;所述转向盘转矩/角度传感器6的+vs端子、gnd端子和vout端子分别与arduino uno控制板的5v引脚、gnd引脚和a0引脚连接;所述ckp/cmp传感器7的+vs端子、gnd端子和vout端子分别与arduino uno控制板的5v引脚、gnd引脚和a1引脚连接;所述挡位传感器8的+vs端子、gnd端子和vout端子分别与arduino uno控制板的5v引脚、gnd引脚和a2引脚连接;所述发光二极管1的正极与arduino uno控制板的d7引脚连接,其负极通过限流电阻2接地;所述蜂鸣器3的正极端子与arduino uno控制板的d4引脚连接,其负极接地;所述电磁换向阀4的+vs端子、gnd端子和v端子分别与arduino uno控制板的d3引脚、gnd引脚和d2引脚连接。
34.作为一种优选,所述电磁换向阀4为三位四通换向阀;其工作在左位时,其p口和a口之间的气路连通,其s口与b口之间的气路连通;其工作在中位时,其p口、a口、b口和s口均截止;其工作在右位时,其p口与b口之间的也路连通,其s口与a口之间的气路连通。
35.为了保证动作的稳定性和可靠性,所述电磁换向阀4的p口通过定压调节阀与汽车的节气门14连接;作为一种优选,所述蜂鸣器3为有源蜂鸣器。
36.本发明中,通过行星齿轮机构的设置,能方便的通过旋转气缸来驱动转向转动轴的转动,从而能方便的实现回正作业,也能避免在回正过程中因卡滞而引起的安全隐患。本发明有效的解决了停车后转向轮未回正的问题。该套装置还可以用在行车过程中的转向助力,达到和液压、电动助力同等助力效果,其实用性很高,适合广泛推广。
37.如图3所示,本发明还提供了一种汽车停车自动回正方法,包括以下步骤:
38.步骤一:通过ckp/cmp传感器7和挡位传感器8实时采集曲轴位置信号和挡位信号,在确定挡位处于驻车档且车辆已经处于熄火状态时执行步骤二;
39.步骤二:通过转向盘转矩/角度传感器6采集转向传动轴9的角度信号,判断车辆是否处于居中回正状态,在处于居中回正状态时不动作,在未居中回正状态时执行步骤三,并控制蜂鸣器3进行设定时长的蜂鸣示警,控制发光二极管1闪烁报警;
40.步骤三:控制电磁换向阀4工作在左位,利用发动机进气管负压作为能源驱动旋转气缸10带动涡杆11转动,涡杆11转动过程中驱动环形齿圈12转动,旋转的环形齿圈12通过行星齿轮13驱动转向传动轴9转动,以通过转向传动轴9带动转向轮回正;该过程中通过转向盘转矩/角度传感器6实时采集转向传动轴9转动的角度信号,并根据角度信号获得转向传动轴9旋转的角度,在旋转的角度达到回正所需要的角度时完成回正作业,并执行步骤四;
41.步骤四:控制电磁换向阀4工作在中位,控制发光二极管1熄灭、蜂鸣器3停止蜂鸣。
42.本发明通过ckp/cmp传感器和挡位传感器双重信号来进行车辆状态的判断,有效的保证了车辆处于熄火状态的准备判断,能避免因车辆等红灯等因素而导致的误判情况的发生,显著的提高了判断的准确性;通过转向盘转矩/角度传感器实时采集转向传动轴转动的角度信号,可不必专门设置其他传感器,有效的利用了车辆原有的部件,并能提高检测的准确性,同时,降低了该方法的实施成本。通过利用发动机进气管负压作为能源进行回正,不需要消耗车辆的电能,节能环保效果较好;通过行星齿轮机构有效避免机构卡死引起的安全隐患,安全性更高;该方法步骤简单、实现成本低,可行性高,具有良好的应用前景。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1