用于线控车辆的转向控制装置及其转向控制方法与流程
1.本发明是有关于一种用于线控车辆的转向控制装置及其转向控制方法。
背景技术:
2.因应车辆主动式安全以及自驾车系统发展,车辆线控(control-by-wire)程度需求与日俱增,而线控转向系统(steer-by-wire)则是自驾车的必备装置,不仅能实时响应来自操作者的转向指令,也能将方向盘隐匿,为自驾车提供充足的机舱空间。然而,由于缺少方向盘与转向车轮之间的机械连接,导致驾驶路感无法直接反馈给操作者,因此需要车辆反馈装置,为操作者提供一个接近真实路面反馈的路感信息。
3.尤其是,操作者在进行具高危险性的实车测试前,通常依靠有线或无线的控制装置远端下达驾驶命令,然而测试途中若车辆发生异常或逐渐失控,在远端控制装置无法提供准确路感反馈的情况下,通常会导致车辆的损毁。因此,如何能在测试车辆时真实地反馈实际车辆状态及驾驶路感,至为重要。
技术实现要素:
4.本发明有关于一种用于线控车辆的转向控制装置及其转向控制方法,以提供操作者实际车辆状态及驾驶感受。
5.根据本发明的一方面,提出一种用于线控车辆的转向控制装置,转向控制装置以无线或有线的方式连接线控车辆,转向控制装置包括一转向控制界面、一转向负载驱动单元以及一处理器。转向控制界面用以输出一车辆转向控制信号至线控车辆,线控车辆对应车辆转向控制信号产生一车辆转向反馈信号。转向负载驱动单元用以反馈一转向感受至一操作者。处理器包括一响应鉴别单元以及一转向负载模拟单元,其中,响应鉴别单元根据车辆转向控制信号及车辆转向反馈信号取得一转向角命令、一转向角反馈以及一车辆速度,并进行傅里叶转换以取得一转向角增益及一转向角相位,以鉴别出线控车辆的一响应特性。转向负载模拟单元分别连接响应鉴别单元及转向负载驱动单元,并将转向角反馈、车辆速度、转向角增益及转向角相位输入至一转向系统模型中,以模拟线控车辆的一转向负载,且转向负载输入至转向负载驱动单元中,以生成转向感受。
6.根据本发明的一方面,提出一种用于线控车辆的转向控制方法,包括下列步骤。输出一车辆转向控制信号至线控车辆,线控车辆对应车辆转向控制信号产生一车辆转向反馈信号。根据车辆转向控制信号及车辆转向反馈信号,取得一转向角命令、一转向角反馈以及一车辆速度。进行傅里叶转换以取得一转向角增益及一转向角相位,以鉴别出线控车辆的一响应特性。将转向角反馈、车辆速度、转向角增益及转向角相位输入至一转向系统模型中,以模拟线控车辆的一转向负载。将转向负载输入至一转向负载驱动单元中,以生成一转向感受。
7.以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
附图说明
8.图1绘示依照本发明一实施例的转向控制装置及应用其的转向线控系统的示意图;
9.图2绘示依照本发明一实施例的转向控制方法的示意图;
10.图3绘示依照本发明一实施例的响应鉴别单元的操作示意图;
11.图4a及图4b分别绘示对应线控车辆的响应特性的转向角增益及转向角相位的示意图;及
12.图5绘示依照本发明一实施例的转向系统模型的简易示意图。
13.附图标记
14.10:转向线控系统
15.100:转向控制装置
16.101:线控车辆
17.102:操作者
18.103:转向机构
19.104:车辆转向反馈信号
20.105:动力转向系统
21.106:转向角反馈
22.108:车辆速度
23.109:阻尼位移
24.110:转向控制界面
25.111:方向盘总成
26.112:车辆转向控制信号
27.113:网络
28.114:转向角命令
29.120:转向负载驱动单元
30.121:驱动器
31.122:阻力单元
32.123:转向负载
33.124:转向感受
34.130:处理器
35.131:响应鉴别单元
36.132:转向负载模拟单元
37.133:傅里叶转换
38.134:转向角增益
39.135:转向角相位
40.136:响应特性
41.137:转向系统模型
42.138:多体动力学模型
43.139:电动助力转向模型
44.141、142:频率响应曲线
45.143:拟合曲线
46.t
t
:操纵力矩
47.t
assist
:助力力矩
48.t
assist
:助力力矩
49.tf:转向阻力矩
50.tb:轮胎回正力矩
51.dtt:等效负载力矩
具体实施方式
52.下面结合附图对本发明的结构原理和工作原理作具体的描述:
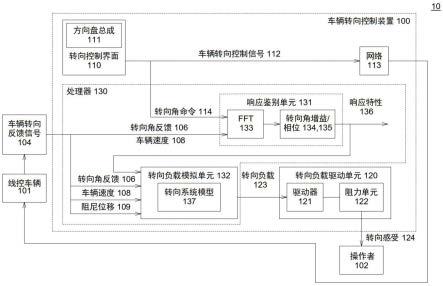
53.请参照第1及2图,其中图1绘示依照本发明一实施例的转向控制装置100及应用其的转向线控系统10的示意图,图2绘示依照本发明一实施例的转向控制方法的示意图。
54.依照本发明的一实施例,转向控制装置100例如以一无线或有线的方式连接一线控车辆101,转向控制装置100用以接收一操作者102的一转向指令,并可将线控车辆101的转向反馈给操作者102,使操作者102如临场般感受到线控车辆101的实际操作。上述无线或有线的方式例如是基于控制器区域网络113(controller area network,can),用于在不需要主机(host)的情况下,允许线控车辆101与转向控制装置100相互通信。
55.请参照图1,转向控制装置100可藉由can通信协议连接线控车辆101内的电子设备,例如藉由电子信号控制引擎或机构的方式,将线控车辆101上原先各自独立操作的机构结构及零组件(例如机械阀或油压装置)改以电子信号取代或整合,并经由行车计算机(ecu)控制,以大幅提升线控车辆101的操纵性与安全性,且线控车辆101内的机械结构及零组件得以精简化。常见的线控应用,例如:线控转向控制(steer-by-wire)、线控悬架控制(suspension-by-wire)、线控制动控制(brake-by-wire)、线控油门控制(throttle-by-wire或drive-by-wire)或线控换挡控制(shift-by-wire)等。
56.请参照图1,转向控制装置100包括一转向控制界面110(包含方向盘总成111)、一转向负载驱动单元120(例如包括驱动器121及阻力单元122)以及一处理器130(例如行车计算机)。转向控制界面110可经由网络(例如can通信网络113)连接至线控车辆101,用以输出一车辆转向控制信号112(例如方向盘转向指令、车速等)至线控车辆101,且响应鉴别单元131可接收线控车辆101的一车辆转向反馈信号104(例如车轮转向角反馈106、车辆速度108、轮胎转向阻尼位移109等),转向负载模拟单元132对应接收来自响应鉴别单元131的响应特性136以及来自线控车辆101的车辆转向反馈信号104(例如车轮转向角反馈106、车辆速度108、轮胎转向阻尼位移109等),并通过转向负载驱动单元120将来自于转向负载模拟单元132的转向负载123转换成符合实际车辆状态及驾驶路感的转向感受124,以反馈转向感受124给操作者102。如图2的步骤s110所示,输出一车辆转向控制信号112至线控车辆101,而线控车辆101对应车辆转向控制信号112产生一车辆转向反馈信号104。
57.在本实施例中,转向控制装置100例如为一线控(control-by-wire)测试装置,其中转向控制界面110(包含方向盘总成111)与线控车辆101的转向机构之间不再采用机械零组件(如转向机柱等)连接,以摆脱传统转向机构的限制,改善驾控方便性与安全性。转向控
制界面110的主要功能是将操作者102的转向意图(通过转向角传感器)转换成数字信号,并传递给处理器130(行车计算机),以产生一车辆转向控制信号112;同时,转向控制界面110亦可接受处理器130(行车计算机)反馈的力矩信号,产生方向盘旋转力矩,以提供操作者102相对应的一路感反馈信息。上述的方向盘总成111包括方向盘、方向盘转角传感器、力矩传感器、控制马达(或致动器)等;线控车辆101的转向机构主要是接受处理器130(行车计算机)的命令,藉由控制马达(或致动器)控制线控车辆101的车轮转动,以实现操作者102的转向意图。
58.请参照图1,处理器130包括一响应鉴别单元131以及一转向负载模拟单元132,例如以软件及/或硬件实现,响应鉴别单元131连接转向控制界面110,并根据车辆转向控制信号112取得一转向角命令114以及根据车辆转向反馈信号104取得一转向角反馈106以及一车辆速度108。此外,响应鉴别单元131还可进行傅里叶转换133以取得一转向角增益134及一转向角相位135,以鉴别出线控车辆101的一响应特性136。如图2的步骤s120所示,响应鉴别单元131根据车辆转向控制信号112及车辆转向反馈信号104,取得一转向角命令114、一转向角反馈106以及一车辆速度108,并进行傅里叶转换133以取得一转向角增益134及一转向角相位135,以鉴别出线控车辆101的一响应特性136。
59.请参照图3、图4a及图4b,其中图3绘示依照本发明一实施例的响应鉴别单元131的操作示意图,图4a及图4b分别绘示对应线控车辆101的响应特性136的转向角增益134及转向角相位135的示意图,图4a纵轴为增益响应(db),横轴为频率(hz);第4b图纵轴为角度(degree),横轴为频率(hz)。响应鉴别单元131可根据转向角增益134及转向角相位135来鉴别线控车辆101的一响应特性136,以得知线控车辆101的一路感反馈,其操作方式如下列步骤s231至s234所示。在步骤s231中,傅里叶转换133用以将一个时域信号转换到一频域信号,也就是将转向角命令114、转向角反馈106以及车辆速度108等时域信号转换成由不同频率响应组成的频谱,其中增益表示为各个频率响应的大小,而相位表示为各个频率响应的周期,接着,在步骤s232中,可由傅里叶转换133之后的频谱计算一转向角增益134及一转向角相位135,用以表示线控车辆101的一响应特性136,接着,在步骤s233中,进行频率响应曲线拟合,例如通过二阶曲线以最小平方法拟合,以求得线控车辆101转向时的模态参数(例如自然频率、阻尼比、模态振型)。在步骤s234中,通过模态参数来进行比较验证,可鉴别出线控车辆101的一响应特性136,响应特性136包括转向角增益134、一转向角相位135及其频率响应曲线141、142等,其中图4a及图4b所示的频率响应曲线141、142分别为转向角增益134相对于频率的响应曲线及转向角相位135相对于频率的响应曲线,第4a图所示的虚线为拟合曲线143。
60.请参照图1,转向负载模拟单元132分别连接响应鉴别单元131及转向负载驱动单元120,用以将转向角反馈106、车辆速度108、转向角增益134及转向角相位135输入至一转向系统模型137中,以模拟线控车辆101的一转向负载123。之后,转向负载123可输入至转向负载驱动单元120中,用以供驱动器121(例如马达)及阻力单元122(例如气压或液压单元)生成一等效负载力矩,以提供操作者102实际车辆状态及转向感受124。如图2的步骤s130所示,将转向角反馈106、车辆速度108、阻尼位移109、转向角增益134及转向角相位135输入至一转向系统模型137中,以模拟线控车辆101的一转向负载123,并将转向负载123反馈至一转向负载驱动单元120中,以生成一转向感受124。
61.请参照图5,其绘示依照本发明一实施例的转向系统模型137的操作示意图。转向系统模型137包括一多体动力学模型138以及一电动助力转向模型139。多体动力学模型138用以建构线控车辆101刚体系统的模型,以供转向负载模拟单元132对包括整车加速、减速、转向、爬坡、下坡时轮胎与地面产生的阻力与转向力矩等进行递推演算,并对车辆动力学性能和参数优化等进行分析及调整,以得知线控车辆101的操控稳定性和平顺性。
62.多体动力学模型138的表达式如下:
63.其中jf是车轮系统的等效惯性,δ
fw
是前轮角度,bf是车轮的黏滞摩擦系数,gf是齿轮减速比,tf是车轮的前轮转向电机输出扭矩,fr是齿条力,r
p
是小齿轮的半径。
64.此外,电动助力转向模型139用以建构线控车辆101的助力转向,以供转向负载模拟单元132模拟电机(或驱动器)提供助力力矩至线控车辆101的动力转向系统105(包含转向机构103及其连杆),使处理器130可根据车速传感器和转矩传感器的信号控制电机的旋转方向和助力大小,以达到实时控制助力力矩。电机可在车速不同时提供不同的电动助力效果,以保证线控车辆101在低速转向行驶时轻便灵活,高速转向行驶时稳定可靠。
65.电动助力转向模型139的表达式如下:
66.其中jc是方向盘的等效惯性,δ
sw
是方向盘角度,bc是方向盘系统的黏滞摩擦系数,t
sw
是操作者输入扭矩,gm是齿轮减速比,tm是电机输出扭矩。
67.请参照图5,一般而言,转矩传感器测出的力矩为线控车辆101输出的操纵力矩t
t
,电机输出的力矩为助力力矩t
assist
。转向阻力矩tf包括转向机构103的惯性力矩、阻尼力矩和摩擦力矩。线控车辆101的操纵力矩t
t
与电机产生的助力力矩t
assist
用以克服转向负载123(包括轮胎的回正力矩tb和转向机构103的惯性力矩、阻尼力矩、摩擦力矩组成的转向阻力矩tf),其中t
t
=tb+t
f-t
assist
。在本实施例中,为了模拟轮胎的回正力矩tb,将轮胎的转向角反馈106、转向角增益134及转向角相位136作为输入参数,输入至转向系统模型137中,以产生模拟的轮胎回正力矩tb,tb=krxr,其中kr为弹性系数,xr为轮胎的角位移。
68.此外,在本实施例中,为了求得线控车辆101的转向负载123,可将车辆转向反馈信号104(包括转向角反馈106、车辆速度108、阻尼位移109、转向角增益134及转向角相位135)输入到转向系统模型137中,用以模拟实际路面上轮胎的回正力矩tb、转向阻力矩tf和助力力矩t
assist
,以求得近似于线控车辆101的操纵力矩t
t
的转向负载123。
69.之后,回到图1,通过转向系统模型137的模拟将近似于线控车辆101的操纵力矩t
t
的转向负载123输入至转向负载驱动单元120(包括驱动器121以及阻力单元122)中,用以生成一等效负载力矩dt
t
,其中dt
t
相当于t
t
,以提供操作者102实际车辆状态及转向感受124。
70.由此可知,本发明上述实施例的用于线控车辆的转向控制装置及其转向控制方法,其中转向系统模型能模拟近似于线控车辆101于真实道路上的操纵力矩t
t
的转向负载(包括轮胎的回正力矩和转向机构103的惯性力矩、阻尼力矩和摩擦力矩等转向阻力矩),并将线控车辆的转向负载反馈至远端的转向控制装置中,用以生成等效负载力矩,为操作者提供一个接近真实转向反馈的驾驶感受。因此,可避免在测试途中车辆发生异常或逐渐失控而无法提供准确路感反馈的情况,以提高车辆转向线控系统的操纵性。
71.当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1