移动机器人及其履带式底盘和重心自平衡装置及方法与流程
1.本发明涉及一种移动机器人,特别是一种移动机器人及其履带式底盘和重心自平衡装置及方法。
背景技术:
2.履带底盘具有土壤单位面积压力小、土壤附着性能好以及不易打滑等优点,被广泛应用于移动机器人领域。传统的履带式底盘具有较好的通过性能,但在复杂行驶环境当中,在通过性、稳定性和越障性三个方面仍存在较大的提升空间。现有技术中主要通过改变履带式底盘的悬挂结构形式来提升复杂环境中的适应性,如在履带底盘两侧增加辅助越障摆臂等,这些方法虽然能够有效提高履带式底盘的越障能力,但同时会显著增加底盘结构复杂程度,维护成本相对较高,使用经济性相对较差。
技术实现要素:
3.本发明所要解决的技术问题是针对现有技术的上述缺陷,提供一种移动机器人及其履带式底盘和重心自平衡装置及方法。
4.为了实现上述目的,本发明提供了一种履带式底盘的重心自平衡装置,其中,包括:
5.横向滑动机构,安装在履带式底盘的车体内,包括横向滑轨、横向滑动电机和横向丝杠,所述横向丝杠与所述横向滑动电机连接,并与所述横向滑轨平行设置;
6.纵向滑动机构,包括纵向滑轨、纵向滑动电机和纵向丝杠,所述纵向丝杠与所述纵向滑动电机连接,并与所述纵向滑轨平行设置,所述纵向滑轨与所述横向滑轨连接,且所述纵向滑轨与所述横向滑轨互相垂直,所述纵向滑动机构可沿所述横向滑轨整体横向移动;
7.配重块,与所述纵向滑动机构连接,并沿所述纵向滑轨移动;
8.传感器,安装在所述履带式底盘的车体内,用于实时采集所述履带式底盘的车体姿态;以及
9.控制器,安装在所述履带式底盘的车体内,并分别与所述传感器、横向滑动电机和纵向滑动电机连接,基于所述传感器采集的信号,实时驱动所述横向滑动电机和/或所述纵向滑动电机,以调整所述配重块的位置。
10.上述的履带式底盘的重心自平衡装置,其中,所述横向滑轨包括前后平行设置的第一横轨和第二横轨,所述第一横轨和第二横轨分别通过螺栓安装于所述履带式底盘的车体前部和后部,所述横向丝杠通过轴承座安装于所述履带式底盘的车体中部,所述横向滑动电机通过法兰安装所述履带式底盘的车体外侧,所述横向滑动电机的电机轴与所述横向丝杠直连,并驱动所述横向丝杠旋转。
11.上述的履带式底盘的重心自平衡装置,其中,所述纵向丝杠通过轴承座安装于所述纵向滑轨上,所述纵向滑动电机通过法兰安装于所述纵向滑轨一侧,所述纵向滑动电机的电机轴与所述纵向丝杠直连,并驱动所述纵向丝杠旋转。
12.上述的履带式底盘的重心自平衡装置,其中,所述纵向滑轨设置有底部滑块和丝杠轴套,所述纵向滑轨通过所述底部滑块与所述横向滑轨连接,并通过所述丝杠轴套与所述横向丝杠连接,所述纵向滑轨可沿所述横向滑轨滑动。
13.上述的履带式底盘的重心自平衡装置,其中,所述配重块包括配重本体、配重滑槽和配重丝杠轴套,所述配重块通过所述配重滑槽与所述纵向滑轨连接,并通过所述配重丝杠轴套与所述纵向丝杠连接,以沿所述纵向滑轨滑动。
14.上述的履带式底盘的重心自平衡装置,其中,所述配重滑槽和配重丝杠轴套设置在所述配重本体底部。
15.为了更好地实现上述目的,本发明还提供了一种履带式底盘的重心自平衡方法,其中,采用上述的重心自平衡装置控制车体重心平衡,包括如下步骤:
16.s100、通过安装在履带式底盘的车体上的传感器实时检测车体姿态,并将检测到的车体姿态信号传送至控制器;
17.s200、控制器根据所述车体姿态信号判断所述履带式底盘的车体是否倾斜,若判断结果为是,则进一步判断是车体左右倾斜或车体前后倾斜;以及
18.s300、若车体为左右倾斜,则控制器实时驱动横向滑动电机调整所述配重块的位置以调节车体重心;若车体为前后倾斜,则控制器实时驱动纵向滑动电机调整所述配重块的位置以调节车体重心。
19.上述的履带式底盘的重心自平衡方法,其中,所述控制器基于重心自动控制算法或手动遥控驱动所述横向滑动电机或所述纵向滑动电机旋转以调整所述配重块的位置改变车体重心。
20.为了更好地实现上述目的,本发明还提供了一种履带式底盘,其中,包括上述的重心自平衡装置。
21.为了更好地实现上述目的,本发明还提供了一种移动机器人,其中,包括上述的履带式底盘。
22.本发明的技术效果在于:
23.本发明能够在避免增加底盘结构复杂程度的同时,有效提高履带式底盘的通过性、稳定性和越障性,成本相对较低,维护相对简单。其履带式底盘重心自平衡装置可根据车体姿态实时调整配重块位置以改变车体重心,进而改善履带式底盘的复杂地形适应性。当履带底盘在平地行驶时,配重块位于初始位置,重心位于车体几何中心。当履带底盘需要爬上垂直障碍时,配重块往车体前部移动,重心前移防止车体翘头,同时可以增大履带与台阶接触位置的牵引力。当履带底盘需要爬坡时,配重块往车体前部移动,重心前移保证履带纵向接地比压基本一致,能够在避免车体翘头的同时,避免履带局部打滑,提高底盘行走牵引力。当履带底盘爬下垂直障碍时,配重块往车体后部移动,重心后移防止车头过早栽至平地,提高车体爬下垂直障碍的稳定性。当履带底盘下坡时,配重块往车体后部移动,重心后移保证履带接地比压基本一致,避免车体翘尾的同时,避免履带局部打滑,提高底盘行走牵引力。当履带底盘需要跨越壕沟时,配重块往车体后部移动,重心后移防止车头栽入壕沟,当履带前沿搭至壕沟后沿,配重块往车体前部移动,直到重心调整至壕沟后沿,重心前移防止车尾栽入壕沟,提高底盘越壕宽度。当履带底盘沿侧坡行走时,配重块沿车体上坡侧移动,重心侧移保证两侧接地比压一致,避免行驶打滑与侧翻。
24.以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
附图说明
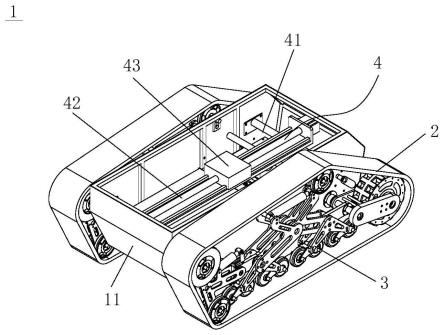
25.图1为本发明一实施例的履带式底盘结构示意图;
26.图2为本发明一实施例的底盘俯视图;
27.图3为本发明一实施例的重心自平衡装置结构示意图;
28.图4为本发明一实施例的横向滑动机构示意图;
29.图5为本发明一实施例的纵向滑动机构示意图;
30.图6为本发明一实施例的纵向滑轨结构示意图;
31.图7为本发明一实施例的配重块结构示意图;
32.图8为本发明一实施例的重心自平衡方法流程图;
33.图9a-9h为本发明在不同地形条件下的配重块位置示意图。
34.其中,附图标记
35.1履带式底盘
36.11车体
37.12电池
38.13底盘驱动电机
39.14电机减速器
40.2履带行走机构
41.3悬挂机构
42.4重心自平衡装置
43.41横向滑动机构
44.411横向滑轨
45.412横向滑动电机
46.413横向丝杠
47.42纵向滑动机构
48.421纵向滑轨
49.422纵向滑动电机
50.423纵向丝杠
51.424底部滑块
52.425丝杠轴套
53.43配重块
54.431配重本体
55.432配重滑槽
56.433配重丝杠轴套
57.44控制器
具体实施方式
58.下面结合附图对本发明的结构原理和工作原理作具体的描述:
59.参见图1,图1为本发明一实施例的履带式底盘1结构示意图。本发明的履带式底盘1,包括车体11和安装在车体11两侧的履带行走机构2和悬挂机构3,以及电池12、底盘驱动电机13和电机减速器14,还包括设置在车体11内的重心自平衡装置4。该重心自平衡装置4适用于在复杂路面环境中行驶的履带式底盘1,例如:丘陵山地果园机器人底盘等。可基于传感器实时感知的履带式底盘1位姿信息,控制器44控制横向滑动机构41和纵向滑动机构42电机,实时调整配重块43位置,进而改变整机重心,提高履带式底盘1复杂地形的适应能力。该履带式底盘1其他部分的组成、结构、相互位置关系和连接关系均为较成熟的现有技术,故在此不做赘述,下面仅对本发明的重心自平衡装置4予以详细说明。
60.参见图2及图3,图2为本发明一实施例的底盘俯视图,图3为本发明一实施例的重心自平衡装置4结构示意图。本发明的履带式底盘1的重心自平衡装置4,可适用于不同悬挂类型的履带2底盘,包括:横向滑动机构41,安装在履带式底盘1的车体11内,包括横向滑轨411、横向滑动电机412和横向丝杠413,所述横向丝杠413与所述横向滑动电机412连接,并与所述横向滑轨411平行设置;纵向滑动机构42,包括纵向滑轨421、纵向滑动电机422和纵向丝杠423,所述纵向丝杠423与所述纵向滑动电机422连接,并与所述纵向滑轨421平行设置,所述纵向滑轨421与所述横向滑轨411连接,且所述纵向滑轨421与所述横向滑轨411互相垂直,所述纵向滑动机构42可沿所述横向滑轨411整体横向移动;配重块43,与所述纵向滑动机构42连接,并沿所述纵向滑轨421移动;传感器,安装在所述履带式底盘1的车体11内,用于实时采集所述履带式底盘1的车体11姿态,所述传感器优选与所述履带式底盘1的车体11固连,优选为惯性测量单元,能够实时采集车体11的姿态信息;以及控制器44,安装在所述履带式底盘1的车体11内,并分别与所述传感器、横向滑动电机412和纵向滑动电机422连接,基于所述传感器采集的信号,实时驱动所述横向滑动电机412和/或所述纵向滑动电机422,以调整所述配重块43的位置。还可包括驱动器、数传模块及遥控器,控制器44用于接收传感器采集的位姿信号并进行处理,控制驱动器驱动横向滑动电机412和纵向滑动电机422进行旋转,数传模块用于接受遥控器的控制信号并传送至控制器44,遥控器用于手动遥控驱动所述横向滑动电机412或所述纵向滑动电机422旋转。
61.参见图4,图4为本发明一实施例的横向滑动机构41示意图。本实施例的所述横向滑轨411包括前后平行设置的第一横轨和第二横轨,可根据履带2底盘的实际长度和配重块43的重量增加横向滑轨411的数量,所述第一横轨和第二横轨分别通过螺栓安装于所述履带式底盘1的车体11前部和后部,所述横向丝杠413通过轴承座安装于所述履带式底盘1的车体11中部,所述横向滑动电机412通过法兰安装所述履带式底盘1的车体11外侧,所述横向滑动电机412的电机轴与所述横向丝杠413直连,并驱动所述横向丝杠413旋转。
62.参见图5,图5为本发明一实施例的纵向滑动机构42示意图。所述纵向丝杠423通过轴承座安装于所述纵向滑轨421上,所述纵向滑动电机422通过法兰安装于所述纵向滑轨421一侧,所述纵向滑动电机422的电机轴与所述纵向丝杠423直连,并驱动所述纵向丝杠423旋转。
63.参见图6,图6为本发明一实施例的纵向滑轨421结构示意图。所述纵向滑轨421设置有底部滑块424和丝杠轴套425,所述纵向滑轨421通过所述底部滑块424与所述横向滑轨411连接,并通过所述丝杠轴套425与所述横向丝杠413连接,所述纵向滑轨421可沿所述横向滑轨411滑动。
64.参见图7,图7为本发明一实施例的配重块43结构示意图。所述配重块43包括配重本体431、配重滑槽432和配重丝杠轴套433,所述配重块43通过所述配重滑槽432与所述纵向滑轨421连接,并通过所述配重丝杠轴套433与所述纵向丝杠423连接,以沿所述纵向滑轨421滑动。所述配重滑槽432和配重丝杠轴套433优选设置在所述配重本体431底部。本实施例中,所述配重块43中的配重本体431优选由两层材质组成,外层材质为不锈钢,内层材质为铅或钨。其中外层材质用于内层材质的保护与配重块43的固定,内层材质为铅或钨,用于增加配重块43的配重,铅或钨材质密度较大,能够有效节省机体内部空间。
65.参见图8,图8为本发明一实施例的重心自平衡方法流程图。本发明的履带式底盘1的重心自平衡方法,采用上述的重心自平衡装置4控制车体11的重心平衡,包括如下步骤:
66.步骤s100、通过安装在履带式底盘1的车体11上的传感器实时检测车体11姿态,并将检测到的车体11姿态信号传送至控制器44;
67.步骤s200、控制器44根据所述车体11姿态信号判断所述履带式底盘1的车体11是否倾斜,若判断结果为是,则进一步判断是车体11左右倾斜或车体11前后倾斜;以及
68.步骤s300、若车体11为左右倾斜,则控制器44实时驱动横向滑动电机412调整所述配重块43的位置以调节车体11重心;若车体11为前后倾斜,则控制器44实时驱动纵向滑动电机422调整所述配重块43的位置以调节车体11重心。
69.其中,所述控制器44基于重心自动控制算法或手动遥控驱动所述横向滑动电机412或所述纵向滑动电机422旋转以调整所述配重块43的位置改变车体11重心。
70.本发明还提供一种包括上述履带式底盘1,且采用上述重心自平衡装置4控制车体11重心平衡的移动机器人。
71.参见图9a-9h,图9a-9h为本发明在不同地形条件下的配重块43位置示意图。当履带式底盘1平地行驶时,配重块43位于初始位置,重心位于车体11几何中心。当履带2底盘需要爬上垂直障碍时,如图9a所示,配重块43往车体11前部移动,重心前移防止车体11翘头,同时可以增大履带2与台阶接触位置的牵引力。当履带2底盘需要爬坡时,如图9b所示,配重块43往车体11前部移动,重心前移保证履带2纵向接地比压基本一致,避免车体11翘头的同时,避免履带2局部打滑,提高底盘行走牵引力。当履带2底盘爬下垂直障碍时,如图9c所示,配重块43往车体11后部移动,重心后移防止车头过早栽至平地,提高车体11爬下垂直障碍的稳定性。当履带2底盘下坡时,如图9d所示,配重块43往车体11后部移动,重心后移保证履带2接地比压基本一致,避免车体11翘尾的同时,避免履带2局部打滑,提高底盘行走牵引力。当履带2底盘沿侧坡行走时,如图9e和图9f所示,配重块43沿车体11上坡侧移动,重心侧移保证两侧接地比压一致,避免行驶打滑与侧翻。当履带2底盘需要跨越壕沟时,如图9g和9h所示,配重块43往车体11后部移动,重心后移防止车头栽入壕沟,当履带2前沿搭至壕沟后沿,配重块43往车体11前部移动,直到重心调整至壕沟后沿,重心前移防止车尾栽入壕沟,提高底盘越壕宽度。
72.工作时,安装于车体11的传感器实时采集整车的位姿信息,控制器44通过重心自动控制算法或手动遥控驱动纵向滑动机构42和横向滑动机构41的电机旋转,进而调整对应滑块位置。当车体11前倾时,控制系统控制配重块43后移调整车体11重心;当车体11后倾时,控制系统控制配重块43前移调整车体11重心;当车体11侧倾时,控制系统控制配重块43侧移调整车体11重心;当车体11处于任意倾斜角度,控制系统控制配重块43沿反倾斜方向
移动调整车体11重心。重心自平衡系统可通过两种方式对底盘重心进行调节,一种通过手动遥控滑块位置调节重心,一种通过传感器检测姿态进行重心自动控制。
73.当通过传感器检测姿态进行重心自动控制时,在履带2底盘行进过程当中,传感器对车体11姿态变化进行实时检测,当底盘上台阶和上坡时,如图9a和图9b,车体11向后倾斜,传感器将测量到的车体11姿态变化量传输至控制器44,控制器44通过电机驱动器驱动纵向滑动电机422,进而调节纵向滑动机构42上的配重块43位置前移,实现车体11重心整体前移。
74.当底盘下台阶和下坡时,如图9c和图9d,车体11向前倾斜,传感器将测量到的车体11姿态变化量传输至控制器44,控制器44通过电机驱动器驱动纵向滑动电机422,进而调节纵向滑动机构42上的配重块43位置后移,实现车体11重心整体后移。
75.当底盘在侧坡行驶时,如图9e,车体11右侧倾斜,传感器将测量到的车体11姿态变化量传输至控制器44,控制器44通过电机驱动器驱动横向滑动电机412,进而调节横向滑动机构41上的纵向滑动机构42整体左移,实现车体11重心整体左移。
76.当底盘在侧坡行驶时,如图9f,车体11左侧倾斜,传感器将测量到的车体11姿态变化量传输至控制器44,控制器44通过电机驱动器驱动横向滑动电机412,进而调节横向滑动机构41上的纵向滑动机构42整体右移,实现车体11重心整体右移。
77.当底盘跨越壕沟时,如图9g和9h,重心自平衡系统通过手动遥控控制车体11重心,当车体11前部悬空时,手动调整配重块43后移,防止车头栽入壕沟,底盘行进至履带2前沿与壕沟后沿接触时,手动调整配重块43前移,防止车尾栽入壕沟。
78.本发明的履带式自走底盘,其重心自平衡装置4可通过调整车体11重心位置提高履带式底盘1复杂地形的适应性。当履带2底盘在复杂地形环境中行驶时,基于传感器采集的车体11位姿状态信息,通过控制器44实时调整滑动机构上的配重块43位置,进而实现履带式底盘1随地形改变整机的重心,提高履带式底盘1在复杂地形环境中的通过性能、稳定性能以及越障性能。且该重心自平衡装置4结构简单,可靠性强,成本低廉,空间占据小,整体可安装于车体11内部,能够有效节省车体11内部空间,适用于不同悬挂类型的履带2底盘。
79.当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1