类阿克曼转向机构转向控制的参数整定方法与流程
1.本发明涉及车辆控制技术领域,尤其涉及一种类阿克曼转向机构转向控制的参数整定方法。
背景技术:
2.在智能车自动导航过程中为了减小编码器的误差应尽量减小车轮与地面的打滑。而使用car
‑
like底盘的智能车在转向时受力情况较为复杂,部分转向牵引力由前轮提供,若要使得车轮不发生打滑现象需要根据车速及转弯半径合理控制前轮转向的角度。而car
‑
like底盘的转向控制方案通常使用舵机和一系列连杆机构,则存在车轮转向角度和舵机转向角度的转换关系。而由于转向机构的设计精度以及安装误差的存在通常转换关系会有一定差别从而影响转向控制。
3.现有的方案往往是假定前轮转向角和舵机转动角度之间存在一个一维函数关系。设舵机转度角度为x,车轮转向角为y则函数关系为y=kx+b。先使x为0后调整b的值同时测试车的直线行驶性能,将b设为直线行驶性能较好情况的参数值。之后使小车最大限度进行转向,并测量出小车的转弯半径与理论转弯半径相比较,调整k的值使得测量值与理论值相匹配则得到k值。现有方案需要多次手动测量,工作量大,手动测量也容易产生较大误差。并且仅仅通过两次整定得到参数,与实际函数关系拟合度较低。
技术实现要素:
4.针对上述问题,本发明提供了一种类阿克曼转向机构转向控制的参数整定方法,具备误差小,测量数据多的优点,解决了实验参数与实际函数关系拟合度较低的问题。
5.本发明的类阿克曼转向机构转向控制的参数整定方法是通过如下技术方案实现的。
6.(1)给定小车一个约束范围内的速度使之围绕一个固定点做圆周运动。
7.进一步的,小车的速度可分解为向前做直线运动的线速度和做转向运动的角速度。
8.进一步的,小车的线速度越大则小车做圆周运动的半径越大,受限于测试场地大小线速度不宜设置过大,又因为一些电机在低速时转速不稳定,小车线速度也不宜设置过小,具体大小需要视实际情况而定。
9.(2)通过改变小车前轮转动控制舵机转动角度,改变小车转向轮的转向角,在小车速度一定的情况下改变小车圆周运动的半径。
10.(3)对小车上陀螺仪的转动角度数据进行采样并进行差分计算,再除以采样周期可以得到小车的角速度数据。
11.进一步的,通常通过陀螺仪直接得到角速度数据抖动及误差过大,所以本发明采用读取角度数据通过差分方式计算角速度。
12.进一步的,因为小车运动中的抖动以及与地面产生的滑移等影响,计算得到的角
速度数据仍然会有抖动,还需要对数据进行滤波处理。
13.(4)待角速度趋于稳定后与之前设定的小车角速度进行对比,若小于之前设定的小车角速度则适当增大前轮转向角,相反适当减小小车前轮转向角。
14.(5)重复(3)、(4)两个步骤,直到设定的小车角速度与测试得到的小车角速度相等,通过小车转向运动模型计算得到此时小车的理论转向角,此时认为确定一组转向角和舵机转动角度。
15.(6)修改小车设定的角速度,重复(2)、(3)、(4)、(5)步骤,得到若干对应的转向角和舵机转动角度数据。
16.(7)利用测试得到的数据进行线性回归拟合,得到小车当前运动转向角和舵机转动角度的函数关系。
17.进一步的,通常由于各种类阿克曼转向机构只是模仿了阿克曼转向机构,在转向运动上并不具备良好的对称性,因此在测试时需要分为左转右转两种情况,分别设定小车向左做圆周运动以及向右做圆周运动,分别测试得到数据分别进行拟合得到两段转向角和舵机转动角度的函数关系。
18.本发明的有益效果是:本发明提供了一种类阿克曼转向机构转向控制的参数整定方法,具备误差小,测量数据多的优点,解决了实验参数与实际函数关系拟合度较低的问题。
附图说明
19.图1为本发明的智能车转向系统的结构示意图。
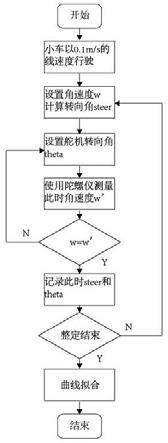
20.图2为本发明的类阿克曼转向机构转向控制的参数整定方法的流程图。
21.图3为本发明的小车转向运动模型示意图。
具体实施方式
22.下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能更易被本领域人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
23.本实施例的智能车转向系统如图1所示。
24.其中通过陀螺仪传感器对小车的角度数据进行采样。
25.其中通过两个直流电机控制小车两个驱动轮的转动。
26.其中通过伺服舵机控制转向轮的转向角大小。
27.其中通过电机驱动器接收指令,通过pid算法控制电机转速,控制小车速度。
28.其中控制器通过采集小车角度信息,并设定小车角速度以及控制小车转向轮转向角实现本发明的参数整定方法,其步骤如图2所示。
29.(1)将实验小车的线速度v固定在一个较小值(0.1m/s)。
30.(2)如图3所示,根据实验需求,设定一个角速度w,根据小车转向运动模型角速度w和线速度v满足关系v=wr,r为小车的转弯半径,小车设置的w不同做圆周运动的半径也不同需留出足够的场地进行测试。
31.(3)根据公式steer=arctan(wheelbase/v*w)计算出此时小车的设定转向角结构如图3所示,steer为此时小车的转向角,wheelbase为小车轴距,v为小车此时的线速度,w为
小车此时的角速度。
32.(4)直接改变实验小车前轮转向舵机的转动角度theta,使小车做圆周运动。
33.(5)通过实验小车当前转向角度,计算得出小车此时转向运动的角速度w’值。
34.(6)测量得到的w’值与设定的w值相比较,若测量值小于设定值则增加舵机的转动角度,若测量值大于设定值则减小前轮的转动角度,重复步骤3直到设定值和测量值相匹配。
35.(7)记录下此时的转向角steer和舵机转动角度theta。
36.(8)重复步骤(2)至(7)。
37.(9)得到若干点后通过线性回归拟合计算得到转向角steer和舵机转动角度theta的映射关系,设所求函数关系式为theta=k*steer+b,其中k和b为待定系数,将所记录对应点代入公式:。
38.上述公式中为测试数据中steer的均值,为theta的均值,为每一组steer和theta乘积的均值,为steer的平方的均值。
39.求出拟合函数的系数k值,之后采用待定系数法得到b值从而确定theta和steer的函数关系theta=k*steer+b。
40.具体的,所述实验小车的底盘采用car
‑
like底盘的类似模拟用底盘;此底盘满足阿克曼梯形,即为满足阿克曼理论转向特性的四连杆机构。
41.具体的,若前轮转向使用了对称性不好的连杆机构则需要将小车的左转右转分开整定;因为转向机构的精度问题,在转换关系后会造成转动角度一定量的偏移误差,将不同方向的转向误差数据进行整合,计算后得到的数据更准确。
42.具体的,采用最小二乘法对steer和theta参数映射关系进行拟合;最小二乘法可以最小化误差的平方和寻找数据的最佳函数匹配,使实验数据结构更准确。
43.具体的,设定角速度w的范围最大不能超过小车转向机构所确定的最小转弯半径,w过大会影响到线速度的限制,w过小则不利于测量。
44.具体的,本方法采用参数自整定方法获得steer参数及其对应的theta参数;自整定的方法人为干预较少,通过多次进行实验后通过最小二乘法得到映射关系,可减少误差。
45.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1