一种排水机器人的制作方法
1.本发明涉及应急排水技术领域,尤其涉及一种排水机器人。
背景技术:
2.在应急排涝抢险作业中,机器人代替人工作业已经逐渐成为一种技术潮流。目前市场上的机器人按照动力源可以分为自带动力和不带动力两种,两种技术方案在实践中均有其局限性。具体表现为以下几个方面:首先,不带动力的排水机器人需要依靠外部设备通过液压管路或者电线向自身提供作业动力,不能独立作业,且排水机器人脱离动力源的距离受限;其次,自带动力的机器人一般情况下动力有限,排水量小,扬程低,排水距离不足,整个机器人的涉水深度也有限;再次,无论是否带动力,目前市场上机器人的排水泵和机器人底盘为一体化设计,排水泵无法离开机器人进行远程独立作业,机器人需要长时间浸泡在水中作业,对机器人的使用寿命造成一定的影响;另外,市场上的排水机器人一般都是将排水泵安装在排水机器人的底盘下方,排水泵离地间隙很小,当排水地形恶劣时,排水机器人在地面通过能力大大下降,严重的会造成排水泵与地面障碍物碰撞导致受损。因此,需要设计一种自带动力、整个机器人涉水深度可调、排水泵的离地间隙可调、排水泵根据需要可以脱离机器人主体进行远程排水作业的排水机器人,从而大大提高排水机器人的越障能力、涉水能力和远程排水作业能力,提高排水机器人的整体作战能力。
技术实现要素:
3.本发明目的就是为了弥补已有技术的缺陷,提供一种排水机器人。
4.本发明是通过以下技术方案实现的:一种排水机器人,包括有行走单元、安装于行走单元上的升降单元、安装于升降单元上的动力单元、排水泵单元、水带绞盘、控制单元、电池组、逆变器单元、充电器单元和水位探测仪单元,还包括有安装于行走单元上的燃油油箱和液压油箱。
5.所述的行走单元包括履带式行走底盘和轮胎式行走底盘。
6.所述升降单元至少包括两组升降机构,每组升降机构包括竖直固定在行走单元两侧架内侧面的导轨、上下滚动或滑动安装于导轨内侧的龙门升降架、固定于龙门升降架顶梁下侧面的升降推杆以及连接在龙门升降架上的一组l形支撑臂,所述的升降推杆下端固定连接有升降推杆托板。
7.所述的龙门升降架包括竖直的左、右侧梁和连接于左、右侧梁顶部之间的顶梁,每侧侧梁正对导轨内侧面的一面分别固定连接有轴,所述轴分别安装于对应侧的轴承件,龙门升降架中左、右侧梁前侧面之间固定有上、下两条分别沿左右水平方向延伸的支撑座,所述的一组l形支撑臂各自后端分别安装在两条支撑座上,l形支撑臂各自前端分别向前水平伸展,所述的升降推杆托板连接在支撑座上。
8.所述的动力单元整体安装在所述的l形支撑臂上,动力单元包括有柴油机/汽油机、散热器、连接盘、传动轴、液压泵固定板、液压泵、液压油箱出油管、长进油管和长出油
管,所述的散热器安装在柴油机/汽油机风扇端,在柴油机/汽油机的另一端分别设置有飞轮盘、传动轴、连接盘、液压泵固定板和液压泵,传动轴与飞轮盘相连,液压泵的动力输入轴与传动轴相连,液压泵整体固定在液压泵固定板上,液压油箱出油管连接液压油箱和液压泵;所述排水泵单元包括潜水泵、液压马达、进油管、进油管快速接头、出油管、出油管快速接头、浮块、连接拉杆、排水泵挂耳、潜水泵进水口滤网及潜水泵液压油冷却管,所述的液压马达通过轴与潜水泵直联,潜水泵泵体外侧设置有排水泵挂耳,潜水泵的进水口处安装有潜水泵液压油冷却管和潜水泵进水口滤网,所述进油管、出油管的两端分别连接有进油管快速接头和出油管快速接头,进油管的一端通过进油管快速接头与液压泵的出油口相连,另一端通过进油管快速接头与液压马达的进油口相连,出油管的一端通过出进油管快速接头与液压马达的出油口相连,另一端通过出油管快速接头与液压油箱的进油口相连,浮块整体位于液压马达和潜水泵的上方,潜水泵泵体上端面设有一组螺孔,浮块通过一组两端带螺纹的连接拉杆及螺母将浮块固定在潜水泵上;所述的动力单元的长进油管、长出油管分别与排水泵单元中液压马达的进油管快速接头和出油管快速接头相连,升降单元中的l形支撑臂与排水泵单元中排水泵挂耳通过龙门升降架及升降推杆的同步升降调节排水泵单元的离地高度,通过行走单元、龙门升降架、升降推杆、进油管和出油管的共同运动,使排水泵单元脱离l形支撑臂和机器人进行分体式远程排水作业。
9.所述水带绞盘包括绞盘和绞盘安装架,绞盘安装在绞盘安装架上,绞盘安装架固定在所述导轨外侧或龙门升降架上;所述控制单元包括柴油机/汽油机控制器、机器人底盘控制器和升降单元控制器,柴油机/汽油机控制器、机器人底盘控制器和升降单元控制器均固定安装在从柴油机/汽油机所在升降机构的l形支撑臂底面一侧或两侧向上延伸出来的安装架上;所述电池组包括柴油机/汽油机用电瓶和行走单元用电池,柴油机/汽油机用电瓶和行走单元用电池均固定安装在从柴油机/汽油机所在升降机构的l形支撑臂底面一侧向上延伸出来的安装架上;水带绞盘的电机通过连接控制单元和电池组来回收或释放排水水带。
10.所述逆变器单元包括逆变器、电力输入导线组一、电力输出导线组一和逆变器安装支架,电力输入导线组一一端连接所述柴油机/汽油机用电瓶的正负极,另一端连接所述逆变器的正负极;所述充电器单元包括充电器、电力输入导线组二、电力输出导线组二和充电器安装支架,电力输入导线组二一端连接逆变器的正负极,另一端连接所述行走单元用电池的正负极;所述电池组中的柴油机/汽油机用电瓶向逆变器等压充电,逆变器经过提升电压,再向充电器传输电力,充电器向行走单元用电池充电,行走单元用电池获得电力后向其他机构输送电力。
11.所述水位探测仪单元包括水位探测仪、导线和水位探测仪安装支架,水位探测仪通过水位探测仪安装支架固定在绞盘安装架的一侧上,水位探测仪通过导线连接在柴油机/汽油机用电瓶上;
所述水位探测仪单元整体安装在水带绞盘的绞盘安装架上,水位探测仪连接在柴油机/汽油机用电瓶上,水位探测仪及时探测前方水深,并将信息提供给升降单元控制器。
12.所述燃油油箱固定安装在行走单元的底盘连接架上,并列位于柴油机/汽油机的一侧,包括箱体一、加油口一、油位计、油温计和油压传感器,油位计、油温计和油压传感器分别与柴油机/汽油机控制器相连;所述液压油箱固定安装在行走单元的底盘连接架的下方,包括箱体二、进油口、出油口、油温传感器和加油口二,其中:进油口通过快速接头连接液压马达出口管,出油口通过液压油箱出油管连接液压泵进油口,油温传感器连接柴油机/汽油机控制器。
13.本发明的优点是:本发明自带动力、整个机器人涉水深度可调、排水泵的离地间隙可调、排水泵根据需要可以脱离机器人主体进行远程排水作业的排水机器人,大大提高排水机器人的越障能力、涉水能力和远程排水作业能力,提高排水机器人的整体作战能力。
附图说明
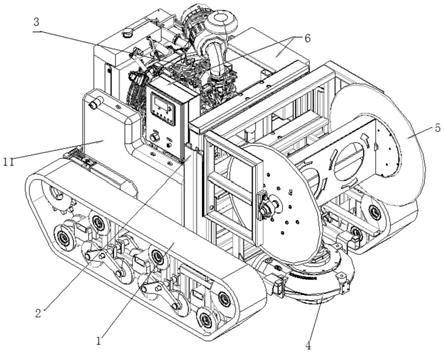
14.图1为本发明的结构示意图。
15.图2为本发明去掉动力单元后结构示意图。
16.图3为本发明升降单元结构示意图。
17.图4为本发明升降单元导轨与轴承件连接结构图。
18.图5为本发明底部结构示意图。
19.图6为本发明左侧视图。
20.图7为本发明右侧视图。
21.图8为本发明俯视图。
22.图9为本发明动力单元与排水泵单元连接示意图。
23.图10为本发明动力单元结构图。
24.图11为本发明排水泵单元结构图。
25.图12为本发明逆变单元和充电单元导线连接图。
26.图13为本发明远程作业场景一示意图。
27.图14为本发明远程作业场景二示意图。
具体实施方式
28.如图1、2、5、6、7、8所示,一种排水机器人,包括有行走单元、安装于行走单元1上的升降单元2、安装于升降单元2上的动力单元3、排水泵单元4、水带绞盘5、控制单元6、电池组7、逆变器单元8、充电器单元9和水位探测仪单元10,还包括有安装于行走单元1上的燃油油箱11和液压油箱12。
29.所述的行走单元1包括履带式行走底盘和轮胎式行走底盘。
30.如图3、4所示,所述升降单元2至少包括两组升降机构,每组升降机构包括竖直固定在行走单元两侧架内侧面的导轨2.1、上下滚动或滑动安装于导轨2.1内侧的龙门升降架2.2、固定于龙门升降架顶梁下侧面的升降推杆2.4以及连接在龙门升降架上的一组l形支撑臂2.5,所述的升降推杆2.4下端固定连接有升降推杆托板2.3。
31.所述的龙门升降架2.2包括竖直的左、右侧梁2.6和连接于左、右侧梁顶部之间的
顶梁2.7,每侧侧梁正对导轨内侧面的一面分别固定连接有轴2.8,所述轴分别安装于对应侧的轴承件2.9,龙门升降架中左、右侧梁前侧面之间固定有上、下两条分别沿左右水平方向延伸的支撑座2.10,所述的一组l形支撑臂2.5各自后端分别安装在两条支撑座上,l形支撑臂各自前端分别向前水平伸展,所述的升降推杆托板2.3连接在支撑座2.10上。
32.所述动力单元3整体通过升降单元2中的导轨2.1、龙门升降架2.2、升降推杆2.4和l形支撑臂2.5的共同作用可以上下调节动力单元3的安装高度,从而提高排水机器人的涉水深度。
33.如图10所示,所述的动力单元3整体安装在所述的l形支撑臂上,动力单元3包括有柴油机/汽油机3.1、散热器3.2、连接盘3.3、传动轴3.4、液压泵固定板3.5、液压泵3.6、液压油箱出油管、长进油管3.7和长出油管3.8,所述的散热器3.2安装在柴油机/汽油机3.1风扇端,在柴油机/汽油机3.1的另一端分别设置有飞轮盘3.9、传动轴3.4、连接盘3.3、液压泵固定板3.5和液压泵3.6,传动轴3.4与飞轮盘3.9相连,液压泵3.6的动力输入轴与传动轴3.4相连,液压泵3.6整体固定在液压泵固定板3.5上,液压油箱出油管连接液压油箱12和液压泵3.6;所述动力单元3还可以为集成式动力站;如图11所示,所述排水泵单元4包括潜水泵4.1、液压马达4.2、液压马达进油管4.10、进油管快速接头4.3、液压马达出油管4.11、出油管快速接头4.4、浮块4.5、连接拉杆4.6、排水泵挂耳4.7、潜水泵进水口滤网4.8及潜水泵液压油冷却管4.9,所述的液压马达4.2通过轴与潜水泵4.1直联,潜水泵4.1泵体外侧设置有排水泵挂耳4.7,潜水泵4.1的进水口处安装有潜水泵液压油冷却管4.9和潜水泵进水口滤网4.8,所述液压马达进油管4.10、液压马达出油管4.11的两端分别连接有进油管快速接头4.3和出油管快速接头4.4,液压马达进油管4.10的一端通过进油管快速接头与液压泵3.6的出油口相连,另一端通过进油管快速接头与液压马达4.2的进油口相连,液压马达出油管4.11的一端通过出进油管快速接头与液压马达4.2的出油口相连,另一端通过出油管快速接头与液压油箱12的进油口相连,浮块4.5整体位于液压马达4.2和潜水泵4.1的上方,潜水泵4.1泵体上端面设有一组螺孔,浮块4.5通过一组两端带螺纹的连接拉杆4.6及螺母将浮块固定在潜水泵上;所述排水泵单元4包括潜水泵4.1、液压马达4.2、进油管快速接头4.3、出油管快速接头4.4、浮块4.5、连接拉杆4.6、排水泵挂耳4.7、潜水泵进水口滤网4.8及潜水泵液压油冷却管4.9;如图9所示,所述的动力单元的长进油管3.7、长出油管3.8分别与排水泵单元4中液压马达4.2的进油管快速接头4.3和出油管快速接头4.4相连,升降单元2中的l形支撑臂2.5与排水泵单元4中排水泵挂耳4.7通过龙门升降架2.2及升降推杆2.4的同步升降调节排水泵单元4的离地高度,通过行走单元1、龙门升降架2.2、升降推杆2.4、进油管3.7和出油管3.8的共同运动,使排水泵单元脱离l形支撑臂和机器人进行分体式远程排水作业。
34.所述水带绞盘5包括绞盘5.1和绞盘安装架5.2,绞盘安装在绞盘安装架上,绞盘安装架固定在所述导轨2.1外侧或龙门升降架2.2上;所述控制单元包括6柴油机/汽油机控制器6.1、机器人底盘控制器6.2和升降单元控制器6.3,柴油机/汽油机控制器6.1、机器人底盘控制器6.2和升降单元控制器6.3均固定安装在从柴油机/汽油机所在升降机构的l形支撑臂2.5底面一侧或两侧向上延伸出来的安装架上;
所述电池组7包括柴油机/汽油机用电瓶7.1和行走单元用电池7.2,柴油机/汽油机用电瓶7.1和行走单元用电池7.2均固定安装在从柴油机/汽油机所在升降机构的l形支撑臂2.5底面一侧向上延伸出来的安装架上;水带绞盘5的电机通过连接控制单元和电池组来回收或释放排水水带。
35.如图12所示,所述逆变器单元8包括逆变器8.1、电力输入导线组一8.2、电力输出导线组一8.3和逆变器安装支架8.4,电力输入导线组一8.2一端连接所述柴油机/汽油机用电瓶7.1的正负极,另一端连接所述逆变器8.1的正负极;所述充电器单元9包括充电器9.1、电力输入导线组二9.2、电力输出导线组二9.3和充电器安装支架9.4,电力输入导线组二9.2一端连接逆变器8.1的正负极,另一端连接所述行走单元用电池7.2的正负极;所述电池组7中的柴油机/汽油机用电瓶7.1向逆变器8.1等压充电,逆变器8.1经过提升电压,再向充电器9.1传输电力,充电器9.1向行走单元用电池7.2充电,行走单元用电池7.2获得电力后向其他机构输送电力。
36.所述水位探测仪单元10包括水位探测仪10.1、导线10.2和水位探测仪安装支架,水位探测仪10.1通过水位探测仪安装支架固定在绞盘安装架5.2的一侧上,水位探测仪10.1通过导线10.2连接在柴油机/汽油机用电瓶7.1上;所述水位探测仪单元10整体安装在水带绞盘5的绞盘安装架上,水位探测仪10.1连接在柴油机/汽油机用电瓶7.1上,水位探测仪及时探测前方水深,并将信息提供给升降单元控制器6.3。
37.所述电池组燃油油箱11固定安装在行走单元1的底盘连接架上,并列位于柴油机/汽油机3.1的一侧,包括箱体一11.1、加油口一11.2、油位计11.3、油温计11.4和油压传感器11.5,油位计11.3、油温计11.4和油压传感器11.5分别与柴油机/汽油机控制器6.1相连;所述液压油箱12固定安装在行走单元1的底盘连接架的下方,包括箱体二12.1、进油口12.2、出油口12.3、油温传感器12.4和加油口二12.5,其中:进油口12.2通过快速接头连接液压马达出口管,出油口12.3通过液压油箱出油管连接液压泵进油口,油温传感器12.4连接柴油机/汽油机控制器6.1。
38.本发明远程作业场景如图13、14所示,所述液压油箱12整体安装在排水机器人底盘连接架的下方,当排水机器人进入水中排水时,液压油箱12整体浸没在水中,从而有效地将液压油的热量传递到水中,确保液压系统在低温下的稳定运行。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1