一种用于重型商用车的线控转向系统
1.本发明涉及一种用于重型商用车的线控转向系统,属汽车转向器领域。
背景技术:
2.目前,对于重型商用车主要使用循环球式液压助力转向器。传统的液压动力转向器具有诸多不足:(1)车速提高,流量提升影响手感。存在高速稳定性和低速轻便性的矛盾;(2)发动机怠速时输出额定流量,对于常流式系统,不转向时油泵也工作,附加燃油消耗大。
3.授权公告号为cn108820035a发明专利公开了一种商用车线控液压转向系统的转向控制方法,系统包括转向盘模块、机械转向模块、液压传动模块及控制模块。控制模块中的ecu输出信号控制液压泵驱动电机和电磁换向阀工作,通过改变液压缸活塞两侧油压,驱动连杆机构以改变车轮的转角;ecu还输出电流信号,通过路感电机反馈给驾驶员对应路感,完成线控液压转向。
4.授权公告号为cn105501293a发明专利公开了一种用于商用车的电动液压转向系统,它由循环球转向器、中间轴、芯轴、蜗轮、蜗杆、传感器、支撑座、电机和控制器构成;循环球转向器的连接阀体一侧通过连接螺钉固装有中间壳体,中间壳体内通过轴承a装有芯轴,芯轴的一端与循环球转向器的输入轴键连接,芯轴的另一端延伸至中间壳体外端,中间壳体内的芯轴上活动套装有中间轴,中间轴与循环球转向器的转向螺杆连接。
5.上述两种发明专利通过增设电机对传统液压动力转向器进行了优化,第一个发明专利通过电机为液压泵提供动力一定程度上减少了燃油消耗,并且可以通过控制电机实现线控转向,但是该设计中转向器转向速度较慢;第二个发明专利通过电机和液压助力共同工作,使转向时所需液压助力减小,达到了节能目的,但是该设计中液压助力与电动助力的耦合令转向器的控制系统更加复杂,也增加了成本,此外上述两种设计都没有改变液压助力系统的油泵、油罐、油管等零部件以及复杂的管路布置和液压油的使用,仍然存在漏油问题,造成环境污染。
技术实现要素:
6.本发明的目的在于提供一种用于商用车的线控转向系统,该线控转向系统能使转向系统去除转向泵和液压油,提高传动效率,从而降低能量损耗和减少环境污染,同时本发明可以由控制器根据车辆的行驶工况实时设置可变传动比,增加驾驶舒适性和减少安全隐患。
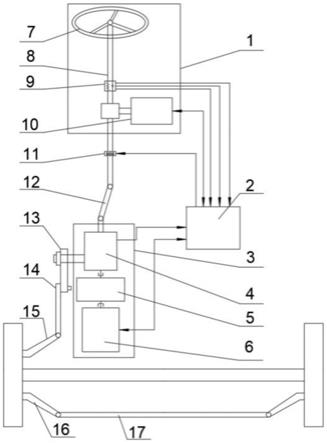
7.为实现上述目的,本发明采用了以下技术方案:一种用于重型商用车的线控转向系统,包括包括路感模拟装置、控制器和主动转向装置,所述路感模拟装置包括转向盘、转向管柱、转矩转角传感器、蜗轮蜗杆减速装置和路感电机,所述路感模拟装置的底部设置有电磁离合器,所述转向管柱底端通过万向节与转向中间轴相连接,所述转向中间轴底端通过万向节与主动转向装置相连接,所述主动转向装置包括循环球式转向器,行星齿轮减速器和转向电机,所述循环球式转向器内部设置有转角传感器。
8.本发明所述转向盘的底部固定连接有转向管柱(8),所述转向管柱的中部设置有蜗轮,所述转向管柱的一侧设置有路感电机,所述路感电机的输出轴固定安装有蜗杆,所述蜗杆与蜗轮传动连接,所述转向盘与蜗轮之间的转向管柱上安装有转矩转角传感器,转矩转角传感器为双通道转角传感器。
9.本发明所述控制器与转向电机、路感电机、电慈离合器电连接并控制工作,所述控制器与转矩转角传感器和循环球式转向器内部转角传感器电连接和信号连接。
10.本发明所述转向器壳体与行星齿轮减速器壳体通过止口结构固定连接,所述转向电机壳体与所述行星齿轮减速器壳体通过止口结构固定连接,所述转向电机为48v直流无刷伺服大扭矩电机,所述行星齿轮减速器为二级行星齿轮减速器,减速比范围为10到30。
11.本发明所述转向器的转向摇臂另一端通过球头销与转向直拉杆滑动连接,所述转向直拉杆另一端通过球头销与转向节臂滑动连接,所述梯形臂一端通过球头销与转向横拉杆滑动连接。
12.本发明的有益效果为:
13.1.本发明不仅可以设置可变传动比,车辆低速行驶时减轻驾驶员的负担,提高商用车转向系统的响应能力;车辆高速行驶时使车辆转向更加稳定,提高商用车的安全性;并通过模拟转向路感,帮助驾驶员获取路面信息,增强驾驶员对车辆和路面状况的综合判断能力。
14.2.本发明去掉转向泵和液压油罐,无复杂的油路及油路附件需要组装,不存在漏油问题,不会造成环境污染。
15.3.本发明采用电动机为转向器提供动力,转向器内部设置有转角传感器,可实时监测转向器转角,且可实现主动转向、车道保持等智能驾驶功能,转向轻便灵活,采用行星齿轮减速机构,降低能量损耗,提高传动效率。
16.4.本发明采用了冗余设计,提高了转向系统的容错性,避免了电机故障导致转向系统失灵引发的安全问题。
附图说明
17.图1是本发明的结构示意图;图2是本发明中转向器的结构示意图
18.1、路感模拟装置2、控制器3、主动转向装置
19.4、转向器5、行星齿轮减速器6、转向电机
20.7、转向盘8、转向管柱9、转矩转角传感器
21.10、路感电机11、电磁离合器12、转向管柱中间轴
22.13、转向摇臂14、转向直拉杆15、转向节臂
23.16、梯形臂17、转向横拉杆
24.401、输入轴402、传感器转子403、传感器定子
25.404、扭杆405、中间壳体406、转向器壳体
26.407、输出轴408、转向螺母409、滚珠
27.410、螺旋弹道411、转向螺杆
28.501、行星架二502、行星轮销轴二503、行星轮二
29.504、太阳轮二505、太阳轴二506、内齿圈
30.507、行星架一508、行星轮销轴一509、行星轮一
31.510、太阳轮一511、太阳轴一
具体实施方式
32.下面对照附图,通过对实施例的描述,对本发明的具体实施方式作进一步详细的说明,目的是帮助本领域的技术人员对本发明的构思、技术方案有更完整、准确和深入的理解,并有助于其实施。
33.需要说明的是,在下述的实施方式中,所述的“第一”和“第二”并不代表结构和/或功能上的绝对区分关系,也不代表先后的执行顺序,而仅仅是为了描述的方便。
34.该用于重型商用车的线控转向系统总成由转向盘(7)、转向管柱(8)、转矩/转角传感器(9)、路感电机(10)、电磁离合器(11)、转向器(4)、行星齿轮减速器(5)、转向电机(6)、转向摇臂(13)、转向直拉杆(14)、转向节臂(15)、梯形臂(16)、转向横拉杆(17)、控制器(2),其特征在于,方向盘(7)装配在转向管柱(8)顶端,转矩转角传感器(9)、电磁离合器(11)依次装配在转向中间轴(8)上,转向中间轴(12)底端与转向器(4)通过万向节相连接。
35.本发明所述转矩转角传感器(9)和转角传感器与控制器(2)相连接,转矩转角传感器(9)能够向控制器(2)输出转角信号、转矩信号和自检信号,,转角传感器也能够向控制器(2)输出转角信号,路感电机(10)、电磁离合器(11)、转向电机(6)与控制器(2)相连接并由控制器(2)控制工作。本发明所述路感电机(10)和转向电机(6)均为直流无刷伺服电机,路感电机(10)和转向电机(6)内设置有电机驱动模块,路感电机(10)和转向电机(6)均设置有电机位置传感器和电流传感器能够对当前路感电机(10)和转向电机(6)的转子位置和转向电流进行测量,且能对路感电机(10)和转向电机(6)工作状态进行监测并在路感电机(10)和转向电机(6)故障时向控制器(2)输出报警信号。
36.驾驶员控制车辆转向时,驾驶员转动转向盘(7),通过转向管柱(8)将转向力矩和转向角度传输到转矩转角传感器(9),转矩转角传感器将作用在转向盘(7)上的转动力矩大小和转动方向以及转向盘(7)转动角度信号收集后发送给控制器(2),控制器(2)将方向盘(7)上的转动力矩大小和转动方向信号以及转向盘转动角度信号处理后,输出电流与转动方向信号至转向电机(6),转向电机(6)转动,经过转向器(4)后,通过转向节臂(15)和转向横拉杆(17)带动车轮进行转向,控制器(2)通过传感器转子(410)相对于传感器定子(403)偏转角度计算输出轴(407)的转动角度,控制器(2)将通过传感器接收到的路感信号处理后,输出电流与转动方向信号至路感电机(10),通过转向管柱(8)传输到转向盘(7),给驾驶员提供路感,当转向电机(6)故障失效时,控制器(2)通过控制电磁离合器(11)闭合,驾驶员可以通过机械转向提供转向力矩,保证电动转向故障下的转向可靠性,防止车辆因转向失去转向力发生事故,提升整车驾乘安全性。
37.车辆自动转向时,整车采集当前所需转向角度,并将转角信号传输至控制器(2);控制器(2)接收到转向角度后,输出电流与转动方向信号至转向电机(6),并输出至转向器(4);转向器(4)在接收到转向电机(6)的转角传递后,通过转向摇臂(13)、转向横拉杆(14)、转向节臂(15)、梯形臂(16)的传递后驱动转向横拉杆(17),实现转向;转向器(4)内部转角传感器将测得的转角信号反馈至控制器(2),控制器(2)将所需转角信号与测得的转角信号进行比较处理后完成自动转向。
38.该二级行星齿轮减速机构由装配壳体和两套太阳轴、行星架和行星轮构成,装配壳体内通过轴承安装有太阳轴一(511),太阳轴一(511)一端与转向电机(6)相连接,太阳轴一(511)另一端通过销连接安装有太阳轮一(510),太阳轮一(510)与四个行星轮一(509)啮合,四个行星轮一(509)与装配壳体上的内齿圈(506)啮合,行星轮销轴一(508)一端与行星架一(507)过盈连接,行星轮销轴一(508)的另一端通过滑动轴承与行星轮一(509)活动连接,行星架一(507)另一端通过销与太阳轴二(505)固定连接,太阳轴二(505)另一端通过销连接安装有太阳轮二(504),太阳轮二(504)与四个行星轮二(503)啮合,四个行星轮二(503)与装配壳体上的内齿圈(506)啮合,行星轮销轴二(502)一端与行星架二(501)过盈连接,行星轮销轴二(502)的另一端通过滑动轴承与行星轮二(503)活动连接,行星架二(501)另一端通过销与转向螺杆(411)固定连接。
39.该循环球式转向器由转向器壳体(406)、转向螺杆(411)、转向螺母(408)、输出轴(407)和传感器构成,转向器壳体(406)内通过轴承活动安装有转向螺杆(411),转向螺杆(411)上活动套装有转向螺母(408),转向螺杆(411)圆周上和转向螺母(408)内壁上分别设置有螺旋弹道(410),螺旋弹道(410)之间通过滚珠(409)活动连接,螺旋弹道(410)配合滚珠(409)能将转向螺母(408)与转向螺杆(411)之间的滑动摩擦转变为转向螺母(408)与滚珠(409)及转向螺杆(411)与滚珠(409)之间的滚动摩擦,由此减小摩擦阻力,且减小转向螺杆(411)和转向螺母(406)的磨损;转向螺杆(411)一侧的转向器壳体(406)上设置有输出轴(407),输出轴(407)端头与转向螺母(408)啮合,转向螺母(408)在转向螺杆(411)的作用下沿着转向螺杆(411)运动时,转向螺母(408)能带动输出轴(407)转动,由此能带动与输出轴(407)连接的车轮进行偏转而进行转向;转向螺杆(411)一端端头的转向器壳体(406)上设置有传感器;传感器由输入轴(401)、扭杆(404)、传感器定子(403)和传感器转子(402)构成,,输入轴(401)为管状体,输入轴(401)通过滑动轴承与转向螺杆(411)活动连接;输入轴(401)内插装有扭杆(404),扭杆(404)通过圆柱销与输入轴(401)连接;输入轴(401)圆周上焊接有传感器定子(403),传感器定子(403)一侧的输入轴(401)上套装有传感器转子(402),传感器转子(402)与转向螺杆(411)固定连接;扭杆(404)与转向螺杆(411)插装连接;中间壳体(405)通过轴承与转向螺杆(411)活动连接;转向螺杆(411)的另一端端头与行星架二(501)固定连接;行星架二(501)转动时,行星架二(501)带动转向螺杆(411)转动,转向螺杆(411)带动传感器转子(402)转动,同时转向螺杆(411)带动扭杆(404)转动,进而使扭杆(404)带动输入轴(401)转动,在输入轴(401)转动过程中带动传感器定子(403)转动,扭杆(404)带动输入轴(401)转动过程中,扭杆(404)发生形变而使传感器转子(402)相对于传感器定子(403)偏转,通过传感器转子(402)相对于传感器定子(403)的偏转角度而测得转向螺杆(411)的转动角度,进而测得转向螺母(408)相对于转向螺杆(411)的行程,由此测得输入轴(401)的转动角度;传感器转子(402)和传感器定子(403)分别与控制器(2)连接,控制器(2)检测传感器转子(402)和传感器定子(403)的状态,传感器转子(402)相对于传感器定子(403)偏转时,控制器(2)通过传感器转子(402)相对于传感器定子(403)偏转角度计算输出轴(407)的转动角度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1