一种可单脚操控的两轮电动平衡车及操作方法与流程
1.本发明属于平衡车技术领域,具体涉及一种可单脚操控的两轮电动平衡车及操作方法。
背景技术:
2.现有的两轮电动平衡车,大都包括第一车轮、第一传感器、第二车轮、第二传感器和控制器,控制器接收第一传感器和第二传感器的信息并控制第一车轮和第二车轮。具体地,第一传感器采集第一踏板的前后倾斜角度,第二传感器采集第二踏板的前后倾斜角度,当两个踏板前倾角度基本一致时,平衡车前进,当两个踏板前倾但前倾角度大于一定值时,平衡车向前转向,当两个踏板后倾角度基本一致时,平衡车后退,当两个踏板后倾但后倾角度大于一定值时,平衡车向后转向。
3.现有的两轮电动平衡车,设有左右两个踏板,需要双脚进行操控,对于残障人士极不友好。
技术实现要素:
4.本发明针对现有两轮电动平衡车需要双脚操控的不足,提供一种可单脚操控的两轮电动平衡车,以提高两轮电动平衡车的适用性。本发明同时提供一种该两轮电动平衡车的操作方法。
5.为实现上述目的,本发明采用如下技术方案:一种可单脚操控的两轮电动平衡车,所述可单脚操控的两轮电动平衡车包括:
6.控制器;
7.第一车轮,具有受控于所述控制器的第一电机;
8.第二车轮,具有受控于所述控制器的第二电机;
9.第一踏板;
10.第二踏板;
11.一直行传感器,与所述控制器电连接,检测所述第一踏板或第二踏板的前后倾斜角度;
12.其中,所述两轮电动平衡车具有单脚操控模式,在单脚操控模式下,所述控制器根据所述直行传感器的信息发送相同的指令给所述第一电机和第二电机,所述第一电机和第二电机同步,使所述两轮电动平衡车直行。
13.本发明的两轮电动平衡车,具有单脚操控模式,在单脚操控模式下,所述控制器仅根据某一直行传感器的信息控制所述第一电机和第二电机同步,使所述两轮电动平衡车直行,从而实现单脚操控。通俗而言,现有的平衡车采集到的两个前后倾斜角是a和 b,平衡车根据a和b的大小以及a和b的差别控制两电机,两电机可能同步可能不同步;而本发明的直行平衡车采集到的倾斜角是c,平衡车仅根据c控制器两电机同步,或者,当设有两个直行传感器时,在同一时间仅一个直行传感器工作,或者,当设有两个直行传感器时,在同一时间
两个直行传感器工作,但是控制器仅根据其中一个直行传感器的信息控制两电机同步,而对另一个直行传感器的信息不做处理。当平衡车根据第一踏板上的直行传感器控制第一电机和第二电机时,控制器使第一踏板平衡,而不管第二踏板是否平衡。
14.作为改进,在单脚操控模式下,所述控制器通过控制第一电机保持第一踏板平衡,通过控制第二电机保证第二踏板与第一踏板同步。
15.作为改进,所述两轮电动平衡车包括与所述第一电机和第二电机固接的车体,所述第一踏板和第二踏板与所述车体前后摆动连接,所述第一踏板或第二踏板与所述车体间设有可拆卸的防止踏板摆动的防摆件。
16.作为改进,所述第一踏板和第二踏板下表面设有与所述控制器电连接且由所述防摆件触发的模式切换开关。
17.作为改进,所述两轮电动平衡车包括两个直行传感器。两个踏板上均设有直行传感器,两个踏板均可前后摆动。但是,控制器只根据其中一个直行传感器的信息控制两个电机同步。
18.作为改进,两个所述直行传感器同步运动,当其中一个损坏时,不影响平衡车的运行,此种平衡车为单脚操控专用。在其它方案中,两个直行控制器分别安装在第一踏板和第二踏板上。
19.作为改进,所述第一踏板上设有第一人体检测开关,所述第二踏板上设有第二人体检测开关。
20.作为改进,所述第一踏板和/或第二踏板上还设有与所述控制器相连的转向传感器。
21.作为改进,所述第一踏板和/或第二踏板可左右摆动,所述控制器根据所述第一踏板和/或第二踏板的左右倾斜角度控制所述第一电机和第二电机异步,实现左右转向。
22.作为改进,所述控制器根据两个转向传感器的左右倾斜角度差控制所述第一电机和第二电机异步,以实现左右转向。当路面左右不平时,根据左右倾斜角度差相比仅根据一个左右倾斜角度控制电机,控制更加准确。
23.作为改进,所述第一踏板和/或第二踏板处还设有可随小腿向左倾斜的左转触发件和可随小腿向右倾斜的右转触发件。
24.作为改进,所述控制器根据所述左转触发件和右转触发件的左右倾斜幅度控制所述第一电机和第二电机异步,实现左右转向。
25.作为改进,所述左转触发件和所述右转触发件处设有压力传感器;所述左转触发件和所述右转触发件上作用有复位件。
26.一种两轮电动平衡车的操作方法,所述两轮电动平衡车的操作方法包括:
27.s1、打开电源开关,选择或者直接进入单脚操控模式;
28.s2、踩上一只脚或者两只脚,平衡车大功率运行后,操作单个踏板前倾或后仰,所述控制器仅根据某一直行传感器的信息控制所述第一电机和第二电机同步,使所述两轮电动平衡车直行;
29.s3、单脚左右倾斜实现左右转向,或者,单腿左右倾斜实现左右转向。
30.本发明的两轮电动平衡车的有益效果是:具有单脚操控模式,在单脚操控模式下,所述控制器仅根据某一直行传感器的信息控制所述第一电机和第二电机同步,使所述两轮
电动平衡车直行,从而实现单脚操控。
31.本发明的两轮电动平衡车的操作方法的有益效果是:可以实现单脚操控。
附图说明
32.图1是本发明实施例一的两轮电动平衡车的结构框图。
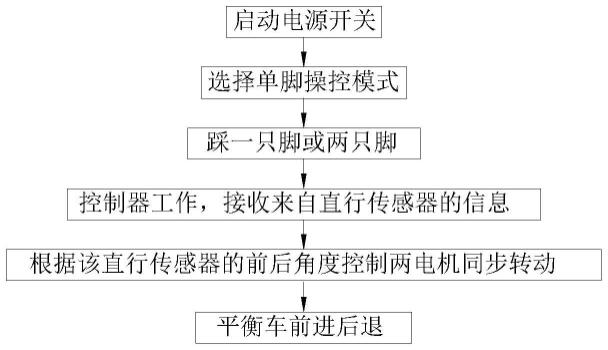
33.图2是本发明实施例一的两轮电动平衡车的操作方法步骤图。
34.图3是本发明实施例二的两轮电动平衡车的结构框图。
35.图4是本发明实施例二的两轮电动平衡车的操作方法步骤图。
36.图5是本发明实施例三的两轮电动平衡车的结构框图。
37.图6是本发明实施例三的两轮电动平衡车的操作方法步骤图。
38.图7是本发明实施例一的两轮电动平衡车的结构示意图。
39.图8是本发明实施例一的两轮电动平衡车的结构分解图。
40.图9是本发明实施例一的两轮电动平衡车的踏板和模式切换开关的结构示意图。
41.图中,1、第一车轮;
42.2、第二车轮;
43.3、第一踏板;
44.4、第二踏板;41、定位槽;
45.5、车体;
46.6、防摆件;
47.7、模式切换开关。
具体实施方式
48.下面结合本发明创造实施例的附图,对本发明创造实施例的技术方案进行解释和说明,但下述实施例仅为本发明创造的优选实施例,并非全部。基于实施方式中的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的其他实施例,都属于本发明创造的保护范围。
49.参见图1、图7至图9,一种可单脚操控的两轮电动平衡车,所述可单脚操控的两轮电动平衡车包括:
50.控制器;
51.第一车轮1,具有受控于所述控制器的第一电机;
52.第二车轮2,具有受控于所述控制器的第二电机;
53.第一踏板3;
54.第二踏板4;
55.一直行传感器,与所述控制器电连接,检测所述第一踏板3或第二踏板4的前后倾斜角度;
56.其中,所述两轮电动平衡车具有单脚操控模式,在单脚操控模式下,所述控制器根据所述直行传感器的信息发送相同的指令给所述第一电机和第二电机,所述第一电机和第二电机同步,使所述两轮电动平衡车直行。
57.本实施例中,所述第一踏板3上设有第一人体检测开关,所述第二踏板4上设有第
二人体检测开关。第一人体检测开关和第二人体检测开关可以设置为只一个触发时平衡车即进行动力输出,从而适用于未配备假肢的残障人士,或者设置为两个都触发时才进行动力输出,从而适用于已配备假肢的残障人士。
58.本实施例中,所述第一踏板3和所述第二踏板4上均设有与所述控制器电连接的直行传感器。直行传感器包括第一踏板3上的第一直行传感器和第二踏板4上的第二直行传感器,当用户先踩在第一踏板3上,后踩在第二踏板4上,或者用户只踩在第一踏板3上,控制器根据第一直行传感器的信息控制左电机和右电机同步运行,而对第二直行传感器的信息不做处理,使平衡车直行。
59.在其它实施例中,第一踏板3和第二踏板4同步摆动,两直行传感器同步摆动,当其中一个直行传感器损坏时,平衡车仍能正常运行。
60.本实施例中,所述两轮电动平衡车包括与所述第一电机和第二电机固接的车体5,所述第一踏板3和第二踏板4与所述车体5前后摆动连接,所述第一踏板3或第二踏板4与所述车体5间设有可拆卸的防止踏板摆动的防摆件6。
61.本实施例中,第一踏板3和第二踏板4上开设定位槽41,防摆件6具有锥形部,防摆件6定位于定位槽41中并由车体5支撑。防摆件6从轴向端部沿轴向向中心安装于踏板和车体5间。防摆件6有两个且相对踏板的转动中心前后分布。
62.本实施例中,所述第一踏板3和第二踏板4下表面设有与所述控制器电连接且由所述防摆件6触发的模式切换开关7。模式切换开关7可以采用光电接近开关。本实施例的平衡车的控制器中存储有双脚操控模式和单脚操控模式,当未安装防摆件6时,控制器默认为双脚操控模式,当安装防摆件6后,防摆件6触发模式切换开关7,从双脚操控模式切换为单脚操控模式。同时,其中一块踏板不会前后摆动,残障人士可以用灵活的脚踩在可前后摆动的踏板上,不灵活的脚踩在不前后摆动的踏板上,操作更加容易。
63.本实施例中,模式切换开关7有两个,两个模式切换开关7并联触发,即当任意一个模式切换开关7被触发时,向控制器发出模式切换信号。
64.本实施例中的两轮电动平衡车,虽然在单脚操控时,仅能直行,但是对于残障人士来说,仍是一个新的选择。
65.本发明实施例一的两轮电动平衡车,具有单脚操控模式,在单脚操控模式下,所述控制器仅根据某一直行传感器的信息控制所述第一电机和第二电机同步,使所述两轮电动平衡车直行,从而实现单脚操控。
66.参见图1和图2,本发明实施例一的两轮电动平衡车的操作方法,所述两轮电动平衡车的操作方法包括:
67.s1、打开电源开关,选择或者直接进入单脚操控模式;
68.s2、踩上一只脚或者两只脚,平衡车大功率运行后,操作单个踏板前倾或后仰,所述控制器仅根据某一直行传感器的信息控制所述第一电机和第二电机同步,使所述两轮电动平衡车直行。
69.实施例二
70.参见图3,本发明实施例二的一种可单脚操控的两轮电动平衡车,所述可单脚操控的两轮电动平衡车包括:
71.控制器;
72.第一车轮,具有受控于所述控制器的第一电机;
73.第二车轮,具有受控于所述控制器的第二电机;
74.第一踏板;
75.第二踏板;
76.第一转向传感器,与所述控制器电连接,检测所述第一踏板的左右倾斜角度;
77.第二转向传感器,与所述控制器电连接,检测所述第二踏板的左右倾斜角度;
78.其中,所述两轮电动平衡车具有单脚操控模式,在单脚操控模式下,所述控制器根据所述第一转向传感器和第二转向传感器的信息控制所述第一电机和第二电机异步,使所述两轮电动平衡车左右转向。
79.本实施例中,左右转向可以通过陀螺仪实现,陀螺仪检测踏板前后倾角和左右倾角。踏板既可前后摆动又可左右摆动的结构可以参照现有技术。
80.在其它实施例中,所述第一踏板和/或第二踏板还设有可随小腿向左倾斜的左转触发件和可随小腿向右倾斜的右转触发件,以实现左右转向。左转触发件和右转触发件高于踏板。所述转向传感器为左转触发件和所述右转触发件处设置的压力传感器,所述左转触发件和所述右转触发件上作用有复位件。当小腿触碰左右转传感器时,平衡车左右转向,具体结构可以借鉴现有的平板车。
81.参见图3和图4,本发明实施例一的一种两轮电动平衡车的操作方法,所述两轮电动平衡车的操作方法包括:
82.s1、打开电源开关,选择或者直接进入单脚操控模式;
83.s2、踩上一只脚或者两只脚,平衡车大功率运行后,操作踏板左右倾斜,所述控制器转向传感器的信息控制所述第一电机和第二电机异步,实现左右转向。
84.实施例三
85.参见图5,本发明实施例三的一种可单脚操控的两轮电动平衡车,所述可单脚操控的两轮电动平衡车包括:
86.控制器;
87.第一车轮,具有受控于所述控制器的第一电机;
88.第二车轮,具有受控于所述控制器的第二电机;
89.第一踏板;
90.第二踏板;
91.第一直行传感器,与所述控制器电连接,检测所述第一踏板的前后倾斜角度;
92.第二直行传感器,与所述控制器电连接,检测所述第二踏板的前后倾斜角度;
93.第一转向传感器,与所述控制器电连接,检测所述第一踏板的左右倾斜角度;
94.第二转向传感器,与所述控制器电连接,检测所述第二踏板的左右倾斜角度;
95.其中,所述两轮电动平衡车具有单脚操控模式,在单脚操控模式下,所述控制器根据所述第一直行传感器和第二直行传感器之一的信息控制所述第一电机和第二电机同步,使所述两轮电动平衡车直行;所述控制器根据所述第一转向传感器和第二转向传感器的信息控制所述第一电机和第二电机异步,使所述两轮电动平衡车左右转向。
96.本实施例中,所述控制器根据两个转向传感器的左右倾斜角度差控制所述第一电机和第二电机异步,以实现左右转向。
97.参见图5和图6,本发明实施例三的两轮电动平衡车的操作方法,包括:
98.s1、打开电源开关,选择或者直接进入单脚操控模式;
99.s2、踩上一只脚或者两只脚,平衡车大功率运行;
100.s31、操作踏板前倾或后仰,所述控制器仅根据某一直行传感器的信息控制所述第一电机和第二电机同步,使所述两轮电动平衡车直行;
101.s32、单脚左右倾斜,所述控制器根据转向传感器的信息控制所述第一电机和第二电机异步,实现左右转向。
102.以上所述,仅为本发明创造的具体实施方式,但本发明创造的保护范围并不局限于此,熟悉该本领域的技术人员应该明白本发明创造包括但不限于上面具体实施方式中描述的内容。任何不偏离本发明创造的功能和结构原理的修改都将包括在权利要求书的范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1