履带式运动平台的制作方法
1.本实用新型属于靶车技术领域,特别是涉及一种履带式运动平台。
背景技术:
2.运动靶车是一种射击训练器材,在使用时搭载靶机,实现轻武器或装甲运动目标的射击训练,提高射手对运动目标的射击技能,也可用于视频侦察。现有技术的运动靶车存在的问题点在于,减振性能不理想,不能适应颠簸路况下的运动,爬坡性能不佳,只能适应较缓的坡度,对于陡峭的坡度无法适应。
3.因此,如何解决上述现有技术存在的缺陷成为了该领域技术人员努力的方向。
技术实现要素:
4.本实用新型的目的就是提供一种履带式运动平台,能完全解决上述现有技术的不足之处。
5.本实用新型的目的通过下述技术方案来实现:
6.一种履带式运动平台,包括车身以及车身两侧的履带式行走机构,所述车身内设有驱动安装腔和电池安装腔,在驱动安装腔内可拆卸式安装有第一驱动电机、第二驱动电机、电机控制器和主控箱,所述第一驱动电机和第二驱动电机用于驱动车身两侧的履带式行走机构,在电池安装腔内可拆卸式安装有电池组,所述驱动安装腔和电池安装腔顶部对应可拆卸式安装第一顶盖和第二顶盖,在第一顶盖上设有靶机安装块和固定式全向天线,第二顶盖上安装靶机安装块,在车身左右两侧安装有防弹钢板,车身前后两端安装有红外线探测器,所述第一、第二驱动电机与电机控制器电联,电机控制器、固定式全向天线、红外线探测器与主控箱电联。
7.进一步,在车身左右两侧通过连接杆安装侧挡板,所述履带式行走机构设置在侧挡板与车身之间,该履带式行走机构包括主动轮组件、从动轮组件、上辅助轮组、下辅助轮组和履带,所述主动轮组件包括主动轮和主动轴,该主动轮安装在主动轴上,且主动轮两侧由法兰盘限位,所述从动轮组件包括从动轮和从动轴,该从动轮安装在从动轴上,且从动轮两侧由法兰盘限位,所述主动轮和从动轮边缘沿周向均匀设置有凸起,所述第一或第二驱动电机的输出轴通过齿轮链条连接主动轴,在主动轮组件与从动轮组件之间均匀设置上辅助轮组和下辅助轮组,履带一端与主动轮配合,另一端与从动轮配合,履带上部内侧与上辅助轮组配合,下部内侧与下辅助轮组配合,所述履带上设有与凸起配合的配合孔。
8.进一步,所述下辅助轮组包括两个辅助轮、第一连接轴、第二连接轴和两个连接板,第一、第二连接轴在竖直方向平行设置,在第一、第二连接轴的两端分别安装连接板,在连接板底端安装辅助轮,两个辅助轮之间通过车轴连接,在第一连接轴的同一水平面上设置减振安装轴,在减振安装轴与第二连接轴之间安装减振部件。
9.进一步,所述下辅助轮组有四组,且前面两组下辅助轮组对应的减振部件与后面两组下辅助轮组对应的减振部件相互对称。
10.进一步,所述减振部件包括下杆、上杆和减振弹簧,所述上杆的一端设有盲孔,下杆的一端套接在第二连接轴上,另一端活动插接在上杆的盲孔中,上杆的另一端套接在减振安装轴上,减振弹簧套接在上杆上。
11.进一步,所述从动轴的两端设有轴孔,通过轴孔在从动轴上安装履带张紧机构,所述履带张紧机构包括张紧杆、套筒、第一紧固块、第二紧固块和垫块,所述张紧杆尾端依次穿过轴孔、套筒和垫块后与第二紧固块螺纹连接,第一紧固块螺纹连接在张紧杆前端。
12.与现有技术相比,本实用新型的有益效果在于:
13.1.减振性能优秀,能够适应颠簸路况下的运动;
14.2.能够适应较陡峭的坡度,适应性更强;
15.3.车身两侧加装有防弹钢板,可防95式自动步枪在30米处正面射击不击穿;
16.4.能快速更换电池组,电池组可拆卸充电,可作为其它设备的备用电源;
17.5.可搭载多种类型的靶机,如:装甲起倒靶机、轻武器起倒靶机、旋转靶机、劫持人质晃动靶机。
附图说明
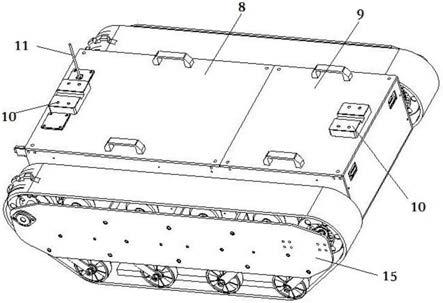
18.图1是本实用新型的结构示意图;
19.图2是本实用新型去掉第一顶盖和第二顶盖后的结构示意图;
20.图3是第一驱动电机和第二驱动电机与履带式行走机构的连接结构示意图;
21.图4是履带式行走机构的结构示意图;
22.图5是主动轮组件的结构示意图;
23.图6是从动轮组件的结构示意图;
24.图7是下辅助轮组的结构示意图;
25.图8是减振部件的结构示意图;
26.图9是上辅助轮组的结构示意图;
27.图10是连接板的结构示意图。
具体实施方式
28.下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
29.如图1至图10所示,一种履带式运动平台,包括车身以及车身两侧的履带式行走机构,所述车身内设有驱动安装腔1和电池安装腔2,在驱动安装腔1内可拆卸式安装有第一驱动电机3、第二驱动电机4、电机控制器5和主控箱6,所述第一驱动电机3和第二驱动电机4用于驱动车身两侧的履带式行走机构,在电池安装腔2内可拆卸式安装有电池组7,所述驱动安装腔1和电池安装腔2顶部对应可拆卸式安装第一顶盖8和第二顶盖9,在第一顶盖8上设有靶机安装块10和固定式全向天线11,第二顶盖9上安装靶机安装块10,在车身左右两侧安装有防弹钢板13,车身前后两端安装有红外线探测器12,所述第一、第二驱动电机3、4与电机控制器5电联,电机控制器5、固定式全向天线11、红外线探测器12与主控箱6电联。
30.该运动平台采用遥控的方式进行控制,在主控箱6内安装无线接收模块,无线接收模块与固定式全向天线11连接,在外部的遥控器上对应设置无线发送模块,利用遥控器发送控制信号,由固定式全向天线11接收信号传递给无线接收模块,从而对运动平台进行控制,遥控的距离大于等于1千米。该靶车除了通过遥控进行控制之外,还可以在地面铺设简易轨道按照预设路线运行。
31.车身前后两端分别设有两个红外线探测器12,用于感应前后方的障碍物,感应距离为1
‑
5米。红外线探测器感应到障碍物后,将信号传递给主控箱,由主控箱控制第一、第二驱动电机工作,实现运动平台停止或返回。
32.车身左右两侧防弹钢板13的厚度≥7毫米,可防95式自动步枪在30米处正面射击不击穿。
33.所述电池组7为2组直流48v20ah电池组,可快速更换电池组,电池组可拆卸充电,可作为其它设备的备用电源。
34.通过靶机安装块可以搭载装甲靶架以及各种不同的靶机,如:装甲起倒靶机、轻武器起倒靶机、旋转靶机、劫持人质晃动靶机。也可以通过靶机安装块搭载无线传输摄像机,用于观察前方情况或感知前方态势。该运动平台不仅仅可以搭载靶机用于射击训练,还具有侦查功能。
35.在车身左右两侧通过连接杆14安装侧挡板15,侧挡板15具有挡尘的作用,所述履带式行走机构设置在侧挡板15与车身之间,该履带式行走机构包括主动轮组件16、从动轮组件17、上辅助轮组18、下辅助轮组19和履带20,所述主动轮组件16包括主动轮21和主动轴22,该主动轮21安装在主动轴22上,且主动轮21两侧由法兰盘23限位,所述从动轮组件17包括从动轮24和从动轴25,该从动轮24安装在从动轴25上,且从动轮24两侧由法兰盘23限位,所述主动轮21和从动轮24边缘沿周向均匀设置有凸起26,所述第一和第二驱动电机3、4的输出轴通过齿轮链条对应连接相应侧履带式行走机构的主动轴22,在主动轮组件16与从动轮组件17之间均匀设置上辅助轮组18和下辅助轮组19,履带20一端与主动轮21配合,另一端与从动轮24配合,履带20上部内侧与上辅助轮组18配合,下部内侧与下辅助轮组19配合,所述履带20上设有与凸起26配合的配合孔。
36.由于履带20通过其上的配合孔与主动轮21及从动轮24上的凸起26配合,使得履带与主动轮和从动轮之间配合非常紧密,采用此传动结构的运动平台在陡坡上行驶不会打滑,并且能够爬60
°
的陡坡。
37.所述从动轴25的两端设有轴孔27,通过轴孔27在从动轴25上安装履带张紧机构,所述履带张紧机构包括张紧杆28、套筒29、第一紧固块30、第二紧固块31和垫块32,所述张紧杆28尾端依次穿过轴孔27、套筒29和垫块32与第二紧固块31螺纹连接,第一紧固块30螺纹连接在张紧杆28前端。在实际使用中,通过调整张紧杆28的长度来调节履带20的张紧程度。
38.所述履带20内侧中部设有限位条33。该限位条33位于上辅助轮组18、下辅助轮组19中两个车轮之间,用于对车轮进行限位。
39.所述下辅助轮组19包括两个辅助轮34、第一连接轴35、第二连接轴36和两个连接板37,第一、第二连接轴35、36在竖直方向平行设置,在第一、第二连接轴35、36的两端分别安装连接板37,在连接板37底端安装辅助轮34,两个辅助轮34之间通过车轴38连接,在第一
连接轴35的同一水平面上设置减振安装轴39,在减振安装轴39与第二连接轴36之间安装减振部件40。
40.所述下辅助轮组19有四组,且前面两组下辅助轮组19对应的减振部件40与后面两组下辅助轮组19对应的减振部件40相互对称。这种对称结构设计可以起到交叉减振效果,进一步提高减振效果。偶遇颠簸路面时,辅助轮向上抬起,进而带动连接板旋转,连接板带动第二连接轴对减振部件作用,减振部件起到减振作用。
41.所述减振部件40包括下杆41、上杆42和减振弹簧43,所述上杆42的一端设有盲孔,下杆41的一端套接在第二连接轴36上,另一端活动插接在上杆42的盲孔中,上杆42的另一端套接在减振安装轴39上,减振弹簧43套接在上杆42上。除此之外,该减振部件40也可以单独采用弹簧。
42.所述连接板37包括上部44和下部45,上部44顶端套接在第一连接轴35上,上部44底端与下部45顶端一体成型,且上部44与下部45之间形成一个钝角,下部45底端安装辅助轮34。所述上部44与下部45相交处连接第二连接轴36。
43.所述前面两组下辅助轮组19对应的连接板37与后面两组下辅助轮组19对应的连接板37相互对称。这种对称结构设计可以起到交叉减振效果,在偶遇颠簸路面时,辅助轮抬起的方向正好相反,减振作用方向相互对称,具有抵销振动分力的效果。
44.类似地,应当理解,为了精简本公开并帮助理解各个实用新型方面中的一个或多个,在上面对本实用新型的示例性实施例的描述中,本实用新型的各个特征有时被一起分组到单个实施例、图、或者对其的描述中。然而,并不应将该公开的方法解释成反映如下意图:即所要求保护的本实用新型要求比在每个权利要求中所明确记载的特征更多的特征。更确切地说,如下面的权利要求书所反映的那样,实用新型方面在于少于前面公开的单个实施例的所有特征。因此,遵循具体实施方式的权利要求书由此明确地并入该具体实施方式,其中每个权利要求本身都作为本实用新型的单独实施例。
45.本领域那些技术人员可以理解,可以对实施例中的设备中的模块进行自适应性地改变并且把它们设置在与该实施例不同的一个或多个设备中。可以把实施例中的模块或单元或组件组合成一个模块或单元或组件,以及此外可以把它们分成多个子模块或子单元或子组件。除了这样的特征和/或过程或者单元中的至少一些是相互排斥之外,可以采用任何组合对本说明书(包括伴随的权利要求、摘要和附图)中公开的所有特征以及如此公开的任何方法或者设备的所有过程或单元进行组合。除非另外明确陈述,本说明书(包括伴随的权利要求、摘要和附图)中公开的每个特征可以由提供相同、等同或相似目的的替代特征来代替。
46.此外,本领域的技术人员能够理解,尽管在此的一些实施例包括其它实施例中所包括的某些特征而不是其它特征,但是不同实施例的特征的组合意味着处于本实用新型的范围之内并且形成不同的实施例。例如,在下面的权利要求书中,所要求保护的实施例的任意之一都可以以任意的组合方式来使用。
47.应该注意的是上述实施例对本实用新型进行说明而不是对本实用新型进行限制,并且本领域技术人员在不脱离所附权利要求的范围的情况下可设计出替换实施例。在权利要求中,不应将位于括号之间的任何参考符号构造成对权利要求的限制。单词“包含”不排除存在未列在权利要求中的元件或步骤。位于元件之前的单词“一”或“一个”不排除存在多
个这样的元件。本实用新型可以借助于包括有若干不同元件的硬件以及借助于适当编程的计算机来实现。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。单词第一、第二、以及第三等的使用不表示任何顺序。可将这些单词解释为名称。
48.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1