足式机器人及足式机器人的足部的制作方法
1.本实用新型属于带交替升起或顺序升起的支承座或支腿的无轨陆用车辆技术领域,具体涉及一种足式机器人及足式机器人的足部。
背景技术:
2.现有的移动机器人主要分为轮式、履带式和足式等几种类型。轮式机器人在运动过程中需要连续平整的地面,难以适应未知的复杂路面。履带式机器人运动需要较大的转弯半径,导致灵活度较低。在行走过程中,足式机器人的腿与地面是间断接触的,使其可以灵活地跨过崎岖程度较高的障碍,具备较高的越障能力,满足在复杂非结构地形环境下运行的要求。
3.目前足式机器人控制方式主要是力控制,即通过设置在足部的力传感器作为感应装置,控制器将力反馈信号与位置控制(或速度控制)的输入信号相结合,通过相关的力/位混合算法(或力/速混合算法),来实现大小腿的运动控制。因此,带压力传感器的足部相当于足式机器人的触觉系统,一个好的足部设计可以使足式机器人的行走更加简便,同时也可以使其适应更多复杂的地形。
4.现有技术中足式机器人的足部力传感器,仅能判断足部是否受到力,而无法判断足部的哪个部位受到力,及哪个部位先受到力,导致对足式机器人的移动产生影响。举例来说:当足式机器人在台阶上行走或在崎岖不平的石块基面上行走时,如果足部底端先与台阶或石块接触,则说明该足部对应的腿模块已经迈到台阶或石块上,控制器应控制该足部对应的腿部模块落足,如果足部的前端与台阶或石块接触,说明足部还不够高,控制器应控制该足部对应的腿部模块继续抬腿。足式机器人的行走模式类似盲人迈台阶,如果足底碰到台阶,则应该落足,如果脚尖碰到台阶,应该继续抬腿。而现有技术的足式机器人的足部不能判断足部的哪个部位受到力,及哪个部位先受到力,导致无法准确的对下一步的动作做出准确的指示,影响足式机器人的移动。因此,需要提供一种针对上述现有技术不足的改进技术方案。
技术实现要素:
5.本实用新型的目的是提供一种足式机器人及足式机器人的足部,以克服上述现有技术中的足式机器人的足部,无法准确检测足部的哪个部位受到力,及哪个部位先受到力,导致无法准确的对下一步的动作做出准确的指示的问题。
6.为了实现上述目的,本实用新型提供如下技术方案:足式机器人的足部,
7.包括:
8.足部基体,所述足部基体固定在足式机器人的小腿的下端;
9.分布式压力传感器,所述分布式压力传感器设置在小腿的下端与所述足部基体之间,具有多个测点;
10.导杆孔,所述足部基体上设置有所述导杆孔,所述导杆孔具有多个,所述导杆孔的
上端分别对准所述分布式压力传感器的所述测点;
11.导杆,所述导杆设置在所述导杆孔中,所述导杆的下端伸出所述导杆孔,所述导杆为弹性件和/或所述导杆与所述测点之间设有弹性件。
12.进一步的,各所述导杆孔的下端呈放射状向下延伸。
13.进一步的,足部还包括足部外壳,所述足部外壳与所述足部基体连接,所述足部外壳为弹性材料并包覆所述足部基体的底部,所述足部外壳在所述足部触地时与地面接触。
14.进一步的,所述足部外壳与所述足部基体围成密封空腔,所述密封空腔中填充泡沫胶,所述泡沫胶将所述足部外壳与所述足部基体粘接。
15.进一步的,所述足部外壳的外周面为弧面,且各处厚度均匀。
16.进一步的,所述足部基体的上端设有插槽,所述插槽供所述小腿的下端插入。
17.进一步的,所述导杆孔的数量为五,五个所述导杆孔的布置位置在所述足部基体的横截面上形成十字形。
18.进一步的,所述导杆沿轴向分为导杆主体和小径段,所述小径段形成所述导杆的下端部且伸出所述导杆孔;
19.所述导杆孔的孔壁具有环形凸起,所述环形凸起与所述导杆主体的下端面挡止配合,防止所述导杆从所述导杆孔中脱出。
20.足式机器人,包括机身和腿模块;
21.所述腿模块固定在所述机身上,所述腿模块包括大腿、小腿和足部;
22.足部,包括:
23.足部基体,所述足部基体固定在足式机器人的小腿的下端;
24.分布式压力传感器,所述分布式压力传感器设置在小腿的下端与所述足部基体之间,具有多个测点;
25.导杆孔,所述足部基体上设置有所述导杆孔,所述导杆孔具有多个,所述导杆孔的上端分别对准所述分布式压力传感器的所述测点;
26.导杆,所述导杆设置在所述导杆孔中,所述导杆的下端伸出所述导杆孔,所述导杆为弹性件和/或所述导杆与所述测点之间设有弹性件。
27.进一步的,各所述导杆孔的下端呈放射状向下延伸。
28.进一步的,足部还包括足部外壳,所述足部外壳与所述足部基体连接,所述足部外壳为弹性材料并包覆所述足部基体的底部,所述足部外壳在所述足部触地时与地面接触。
29.进一步的,所述足部外壳与所述足部基体围成密封空腔,所述密封空腔中填充泡沫胶,所述泡沫胶将所述足部外壳与所述足部基体粘接。
30.进一步的,所述足部外壳的外周面为弧面,且各处厚度均匀。
31.进一步的,所述足部基体的上端设有插槽,所述插槽供所述小腿的下端插入。
32.进一步的,所述导杆孔的数量为五,五个所述导杆孔的布置位置在所述足部基体的横截面上形成十字形。
33.进一步的,所述导杆沿轴向分为导杆主体和小径段,所述小径段形成所述导杆的下端部且伸出所述导杆孔;
34.所述导杆孔的孔壁具有环形凸起,所述环形凸起与所述导杆主体的下端面挡止配合,防止所述导杆从所述导杆孔中脱出。
35.进一步的,足式机器人还包括螺栓,插槽的槽侧壁上对称设有通孔,所述小腿上对应所述通孔设有螺纹孔,所述螺栓穿过所述通孔与所述螺纹孔连接,以将所述足部基体固定在所述小腿上。
36.与最接近的现有技术相比,本实用新型提供的技术方案至少具有如下有益效果:
37.1)能同时测不同点的实时压力情况,根据各点的实时压力情况判断机器人工况为平路、爬坡或下坡等,足式机器人上设置的处理器针对平路、爬坡、下坡等不同路况,实时调整控制算法,达到更精准的运动控制和更好的运动效果。
38.2)导杆孔呈放射状,各导杆孔的延伸方向与对应导杆的受力方向同向或接近,间接提高了压力传感器的检测精度。
39.3)足部外壳为弹性材料,运动过程中不仅能更好的减震和缓冲,而且与地面的摩擦力大。
40.4)泡沫胶不仅能够粘接足部外壳和足部基体,还能进一步起到减震作用。
41.5)足部外壳为球形,在挤压作用下,弹性材料变形,与地面的接触由点
‑
面接触变成了面
‑
面接触,增大了接触面积,具有更好的抓地力,不易打滑。
42.6)小腿下端插入插槽,小腿与足部基体的连接能够更加牢固。
43.7)十字交叉分布使导杆相对均衡分布,在足部的下部各点受到压力时都能准确检测。
44.8)通过简单的结构防止导杆从导杆孔中脱出,挡止可靠成本较低。
45.9)通过螺栓可拆连接小腿和足部,在足部损坏后便于维护和更换。
附图说明
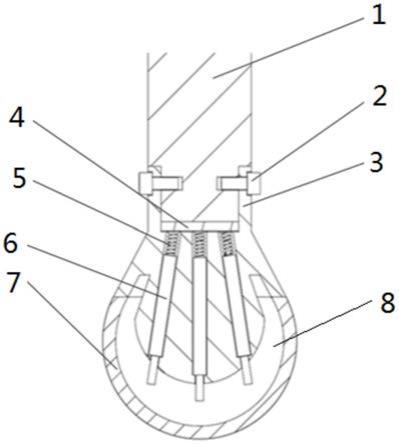
46.图1为本实用新型的足式机器人的具体实施例中的小腿的一部分和足部的剖视图;
47.图2为图1中分布式压力传感器的结构示意图;
48.图3为图1中足部基体的剖视图;
49.图4为图1中导杆的剖视图。
50.图中:1、小腿;2、螺栓;3、足部基体;31、插槽;32、通孔;4、分布式压力传感器;41、测点;5、弹簧;6、导杆;61、导杆主体;62、小径段;7、足部外壳;8、泡沫胶;9、导杆孔;10、环形凸起。
具体实施方式
51.下面将对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本实用新型保护的范围。
52.下面将参考附图并结合实施例来详细说明本实用新型。需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
53.本实用新型的足式机器人的具体实施例:足式机器人包括机身和腿模块,腿模块固定在机身上,腿模块包括大腿、小腿1和足部。机身、大腿和小腿1为现有技术中足式机器人的固有结构,本实用新型的足式机器人中的机身、大腿和小腿1与现有技术中足式机器人
的机身、大腿和小腿并无区别,即本实用新型的改进之处不在于机身、大腿和小腿1,不再赘述。
54.足部包括足部基体3、分布式压力传感器4、导杆6、弹簧5、足部外壳7。
55.足部基体3为3d打印件,固定在足式机器人的小腿1的下端,具体的:足部基体3的上端设有插槽31,插槽31供小腿1的下端插入,插槽31的槽侧壁上对称设有两对通孔32,小腿1上对应通孔32设有螺纹孔。足式机器人包括四个螺栓2,螺栓2穿过通孔32与螺纹孔螺纹连接,以将足部基体3固定在小腿1上。
56.如图3所示,分布式压力传感器4为分布式柔性薄膜压力传感器,设置在小腿1的下端与足部基体3之间,具有多个测点41;本实施例中的分布式压力传感器4具有五个测点41,这五个测点41呈十字形分布,具体的,绕分布式压力传感器4周侧均布四个测点,在分布式压力传感器4的中心处布置一个测点。
57.足部基体3上设置有导杆孔9,导杆孔9具有五个(数量与分布式压力传感器4的测点41数量对应),导杆孔9的上端分别对准分布式压力传感器4的测点41,导杆孔9的下端沿放射状向下延伸,各导杆孔9的呈放射状(非平行状)设置在足部基体3内。导杆6设置在导杆孔9中,导杆6的下端伸出导杆孔9,本实施例中,导杆6与分布式压力传感器4之间设置弹簧5作为弹性件,起到缓冲吸能的作用。其他实施例中,也可以不设置弹簧5,此时导杆6需要用高弹橡胶等弹性材料制成,避免导杆6损坏分布式压力传感器4。
58.足部外壳7的外周面为弧面,且各处厚度均匀。足部外壳7为弹性材料(具体为橡胶)并包覆足部基体3的底部,足部外壳7在足部触地时与地面接触。
59.足部外壳7与足部基体3围成密封空腔,密封空腔中填充泡沫胶8,泡沫胶8将足部外壳7与足部基体3粘接,泡沫胶8既起到连接作用,又起到缓冲吸能的作用。泡沫胶8、足部外壳7和弹簧5形成多级缓冲。
60.导杆6沿轴向分为导杆主体61和小径段62,导杆主体61和小径段62的连接处形成环形台阶面,小径段62形成导杆6的下端部且伸出导杆孔9并伸入泡沫胶8中。导杆孔9的孔壁具有环形凸起10,环形凸起10与导杆主体61的下端面挡止配合,防止导杆6在弹簧5作用下从导杆孔9中脱出。
61.本实用新型的足式机器人的足部的具体实施例的结构,与上述足式机器人的具体实施例中的足部的结构相同,不再赘述。
62.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均在本实用新型待批权利要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1