全地形车的制作方法
1.本实用新型涉及车辆技术,尤其是涉及一种全地形车。
背景技术:
2.随着人们生活水平的提高,作为玩乐用途的全地形车愈发受到欢迎。同时也催生了儿童全地形车的市场和需求。
3.悬架组件是连接车辆行走组件和车架的重要部件,并且起到在行驶过程中滤过路面振动的作用。
4.申请人在实现本技术实施例中实用新型技术方案的过程中,发现上述技术至少存在以下技术问题:
5.现有技术中,前悬架与车辆之间的连接常采用设置摇臂横梁和设于摇臂横梁上的u形安装座进行安装。但是摇臂横梁和u形安装座结构较为臃肿且复杂,占据较多空间,也增加了后期的维护难度。
技术实现要素:
6.有鉴于此,本技术通过提供一种全地形车,其摒弃了传统的摇臂横梁和设于摇臂横梁上的u形安装座的前悬挂安装结构,通过摇臂安装座与装配式支架将前悬架连接到车架上,增加了连接强度,同时简化了连接结构,为安装其他部件预留了空间。
7.本技术实施例提供了一种全地形车,全地形车包括:车架,包括车架主体;行走组件,包括第一行走轮组和第二行走轮组;驱动组件,包括驱动电机,驱动电机用于驱动第一行走轮组和第二行走轮组的至少其中之一;鞍座组件,设置在车架上方;电源组件,至少部分设置在鞍座组件下方,电源组件包括可给驱动组件供电的主电源;制动装置,包括刹车组件和驻车组件;悬架组件,包括前悬架和后悬架,第一行走轮组通过后悬架连接至车架,第二行走轮组通过前悬架连接至车架;其中,前悬架包括第一摇臂组件和第二摇臂组件,第一摇臂组件的一端通过第一枢转轴与车架相连,第一摇臂组件的另一端与第二行走组件的部分枢接,第二摇臂组件一端通过第二枢转轴与车架相连,第二摇臂组件的另一端与第二行走组件的部分枢接;第一摇臂组件与第二摇臂组件沿左右方向对称设置。
8.进一步地,车架主体上设有摇臂安装座,第一摇臂组件的部分与第二摇臂组件的部分分别通过枢接的方式与摇臂安装座连接;车架主体上设有装配式支架,装配式支架将第一摇臂组件与第二摇臂组件连接在一起。
9.进一步地,沿前后方向,摇臂安装座设于装配式支架前方。
10.进一步地,第一摇臂组件包括第一水平摇臂和第一弯摇臂,第一水平摇臂的一端通过第一枢转轴与第二行走轮组枢接,第一水平摇臂的另一端与车架主体枢接,第一弯摇臂的一端与第一水平摇臂固定连接,第一弯摇臂的另一端与车架主体枢接;第二摇臂组件包括第二水平摇臂和第二弯摇臂,第二水平摇臂的一端通过第二枢转轴与第二行走轮组枢接,第二水平摇臂的另一端与车架主体枢接,第二弯摇臂的一端与第二水平摇臂固定连接,
第二弯摇臂的另一端与车架主体枢接。
11.进一步地,沿前后方向,第一水平摇臂基本设于第一弯摇臂的前方,第二水平摇臂基本设于第二弯摇臂的前方。
12.进一步地,第一弯摇臂的一端通过焊接的方式与第一水平摇臂固定连接,第二弯摇臂的一端通过焊接的方式与第二水平摇臂固定连接。
13.进一步地,车架主体上设有摇臂安装座,第一水平摇臂的一端与第二水平摇臂的一端分别通过枢接的方式与摇臂安装座连接;车架主体上设有装配式支架,装配式支架将第一水平摇臂与第二水平摇臂连接在一起。
14.进一步地,摇臂安装座与装配式支架之间还设有制动三通阀,制动三通阀还位于第一枢转轴与第二枢转轴之间。
15.进一步地,以第一枢转轴与第二枢转轴所在的平面为预设平面,制动三通阀设于预设平面上方或预设平面下方,沿竖直方向,制动三通阀与预设平面之间的距离大于等于0且小于等于60mm。
16.进一步地,以第一枢转轴与第二枢转轴所在的平面为预设平面,制动三通阀设于预设平面上方或预设平面下方,沿竖直方向,制动三通阀与预设平面之间的距离大于等于0且小于等于40mm。
17.本技术实现方式中的技术方案,至少具有以下技术效果或优点:
18.由于摒弃了传统的摇臂横梁和设于摇臂横梁上的u形安装座的前悬挂安装结构,通过摇臂安装座与装配式支架将前悬架连接到车架上,增加了连接强度,同时简化了连接结构,为安装其他部件预留了空间。
附图说明
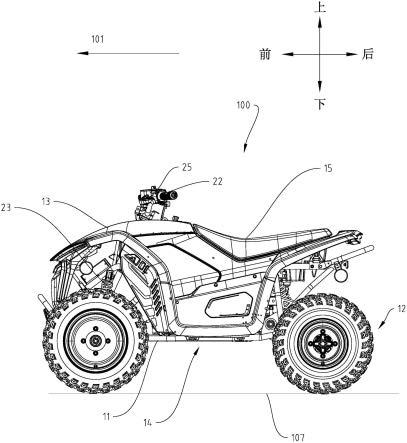
19.图1为本技术中全地形车的一种示意图;
20.图2为本技术中全地形车的一种剖视示意图;
21.图3为本技术中全地形车的一种俯视示意图;
22.图4为本技术中全地形车中车架的立体示意图;
23.图5为本技术中全地形车中前端支撑架的一种示意图;
24.图6为本技术中全地形车中车架的另一视角的立体示意图;
25.图7为图6中a处的放大示意图;
26.图8为本技术中全地形车中车架的侧视示意图;
27.图9为本技术中全地形车中车架安装行走组件后的俯视图;
28.图10为本技术中全地形车中车架的另一种示意图;
29.图11为本技术中全地形车第一行走轮组和第二行走轮组处于第一状态位置的一种示意图;
30.图12为本技术中全地形车第一行走轮组和第二行走轮组处于第二状态位置的一种示意图;
31.图13为本技术中全地形车中车架与驱动电机组合的一种示意图;
32.图14为本技术中全地形车中鞍座组件支撑结构的一种示意图;
33.图15为本技术中全地形车中鞍座组件的一种示意图;
34.图16为本技术中全地形车中刹车组件各部件之间连接关系的一种示意图;
35.图17为本技术中全地形车中第二刹车组件的一种示意图;
具体实施方式
36.以下将结合附图所示的具体实施方式对本实用新型进行详细描述,但这些实施方式并不限制本实用新型,本领域的普通技术人员根据这些实施方式所做出的结构、方法、或功能上的变换均包含在本实用新型的保护范围内。
37.如图1至图3所示,一种全地形车100包括:车架11、行走组件12、车身覆盖件13、电源组件14、鞍座组件15、传动组件16、制动组件17、转向组件18、驱动组件19、车灯组件21、操作组件22、悬架组件23、控制单元24以及仪表组件25。为了清楚的说明本技术的技术方案,还定义了如图1所示的前侧、后侧、上侧和下侧,及如图2所示的前侧、后侧、左侧和右侧。车架11用于支撑车身覆盖件13。行走组件12位于车架11的下方且能带动全地形车100移动,行走组件12包括第一行走轮组121和第二行走轮组122,第一行走轮组121包括两个驱动轮,第二行走轮组122包括两个从动轮。通常情况下,第一行走轮组为设于全地形车100后部的后部轮组,第二行走轮组为设于全地形车100前部的前部轮组。鞍座组件15安装在车架11的上方,用于供使用者乘坐。车架11上位于鞍座组件15的下方位置安装有电源组件14,电源组件14用于为全地形车100提供电能。驱动组件19与电源组件14电连且靠近第一行走轮组121安装在车架11上,驱动组件19驱动行走组件12并带动全地形车100进行移动,驱动组件19驱动第一行走轮组121或第二行走轮组122中的至少之一提供驱动力,使全地形车100进行能够行走。悬架组件23分别与行走组件12和车架11进行枢接。转向组件18与悬架组件23固定连接且与车架11枢接,用于控制全地形车100的行驶的方向。操作组件22靠近进转向组件18安装,用于控制全地形车100的行驶状态。仪表组件25安装在操作者可以目视的前方位置,用于为操作者提供全地形车100行驶中的相关数据。车灯组件21安装在车架11的前端和后端,用于为操作者提供照明、转向或报警指示信号。控制单元24用于控制全地形车100的运行状态。两个驱动轮与地面接触的两点连线与两个从动轮与地面接触两点的连线在同一平面内,定义该平面为接触平面107,以平行于接触面107并且沿全地形车由后往前延伸的方向为第一方向101。
38.作为一种实现方式,如图4所示,车架11为金属框架,包括车架主体111及前端支架112,前端支撑架112固定连接在车架主体111的前端,前端支撑架112用于支撑车身覆盖件13的前端。前端支撑架112包括第一横杆1121、第二横杆1122、第一弯杆1123和第二弯杆1124,第一横杆1121安装在车架主体111前端上部,第二横杆1122安装在车架主体111前端下部,在第一横杆1121和第二横杆1122之间设有与车身覆盖件13前端形状相适应的第一弯杆1123和第二弯杆1124,第一弯杆1123的两端分别与第一横杆1121和第二横杆1122进行焊接,第二弯杆1124的两端分别与第一横杆1121和第二横杆1122进行焊接,使得第一弯杆1123、第二弯杆1124、第一横杆1121的部分、第二横杆1122的部分形成一个四周封闭的安装区,在安装区内的第一横杆1121上设有电器单元安装座1125,电器单元安装座1125用于安装电器单元。在第一横杆1121上还设有向接触平面107延伸的至少一个竖杆1127和线缆单元安装座1126,线缆单元安装座1126通过竖杆1127安装在电器单元安装座1125的下方。
39.作为一种实现方式,如图5所示,在安装区四周的第一横杆1121、第一弯杆1123、第
二弯杆1124上分别设有过线孔1129,过线孔1129用于固定电器单元引出的线缆。电器单元的至少部分线缆还通过过线孔1129沿第一横杆、第一弯杆或第二弯杆至少之一延伸。具体地,电器单元的部分线缆还通过过线孔1129由第一横杆1121向第一弯杆1123延伸,电器单元的部分线缆还通过过线孔1129由第一横杆1121向第二弯杆1124延伸。在第一横杆1121的两端分别设有安装孔1128,在第二横杆1122的两端分别设有安装孔1128,前端支撑架112通过第一横杆两端的安装孔1128及第二横杆两端的安装孔1128固定于车架主体111前端。前端支撑架112与车架主体111之间可以为可拆卸连接,可拆卸连接具体可以为通过螺栓等紧固件连接。前端支撑架112与车架主体111之间也可以为不可拆卸的固定连接,不可拆卸的固定连接具体可以为焊接。前端支撑架112与车架主体111分体式设计,在全地形车100装配前,有利于车架主体111的转运和存放。在车架主体111的前方位置设置前端支撑架112,加强了车身塑料件前部支撑强度,避免出现车身塑料件前端塌陷的情况,同时,电器单元引出的线缆通过线缆单元安装座1126固定,然后线缆经过线孔1129引出至外部。此种设置使线缆布置更规范、合理,能够进一步提高电气系统维修的便利性。
40.作为一种实现方式,如图6至图7所示,车架主体111包括第一主梁架1111、第二主梁架1112、前端支架1113、后端支架1114。第一主梁架1111包括至少两个,两个第一主梁架1111对称设置在车架主体111的顶部位置。第二主梁架1112包括至少两个,两个第二主梁架1112对称设置在车架主体111的底部位置。第二主梁架1112包括第二水平梁1112a。前端支架1113设置在车架主体111前端位置,后端支架1114安装在车架主体111的后端位置。前端支架位于第二水平梁的上方。前端支架1113与第二水平梁之间的夹角大于等于0且小于等于90
°
。前端支架所在的平面与接触平面的夹角大于等于40
°
且小于等于90
°
。进一步地,前端支架所在的平面与接触平面的夹角大于等于50
°
且小于等于80
°
。在前端支架1113与第二主梁架1112的第二水平梁1112a焊接的位置处,在电泳处理后,容易产生积液、漆瘤、流挂等电泳缺陷。作为一种实现方式,前端支架1113与第二主梁架1112的第二水平梁1112a连接处设有弯曲部1113a,弯曲部1113a设有弯曲角度,弯曲角度使弯曲部1113a与第二水平梁1112a连接后二者基本平行。弯曲部1113a位于第二水平梁1112a的上方,弯曲部1113a下表面的部分与第二水平梁1112a相互贴合并连接在一起。弯曲部1113a包括与第二水平梁1112a的外部形状相适应的凹弧形表面,凹弧形表面形成一过流槽1113b,过流槽1113b的长度大于弯曲部1113a与第二水平梁1112a相互接触部分的长度,过流槽1113b基本沿第二水平梁1112a延伸。弯曲部1113a的过流槽1113b表面与第二主梁架1112的第二水平梁1112a外部形状相接触时,围合形成一允许流体通过的腔体,该腔体的长度延伸至前端支架1113与第二水平梁1112a的相交处,该腔体为两端均具有开口并贯穿的腔体。过流槽1113b可以为圆弧形凹槽,也可以为方形凹槽,过流槽1113b的形状不做具体的限定。通过这样的方式,在车架主体111进行电泳处理时,在前端支架1113与第二水平梁1112a的相交处的电泳液体通过过流槽1113b引流到车架主体111的外部,避免了车架主体111出现漆瘤、流挂、积液等电泳缺陷,提高了电泳的合格率。为了提高前端支架1113与第二水平梁1112a焊接后的结构强度,在与过流槽1113b所在凹弧形表面相对的另一面设有凸起结构1113c,凸起结构1113c的长度与过流槽1113b的长度相适应,凸起结构1113c的形状基本与过流槽1113b的形状相同。
41.作为一种实现方式,如图8所示,悬架组件23包括前悬架231、后悬架232、第一减震器233和第二减震器234。悬架组件23用于在行走组件12和车架11之间传递力和力扭,并且
缓冲由不平路面传给车架11的冲击力,并衰减由此引起的震动,以保证全地形车100能平稳地行驶。后悬架232包括后摇臂2321,后摇臂2321的一端与第一行走轮组121枢接,后摇臂2321的另一端与车架主体111枢接。
42.作为一种实现方式,如图9所示前悬架231包括第一摇臂组件2311和第二摇臂组件2312。第一摇臂组件与第二摇臂组件沿左右方向对称设置。第一摇臂组件2311的一端与行走组件12进行枢接,第一摇臂组件2311的另一端与车架主体111进行枢接;第二摇臂组件2312的一端与行走组件12进行枢接,第二摇臂组件2312的另一端与车架主体111进行枢接。第一摇臂组件2311包括第一水平摇臂2311a和第一弯摇臂2311b,第二摇臂组件2312包括第二水平摇臂2312a和第二弯摇臂2312b,第一水平摇臂2311a一端的第一枢转轴2311c与第二行走轮组122进行枢接,第一水平摇臂2311a另一端与车架主体111进行枢接,第一弯摇臂2311b的一端与第一水平摇臂2311a进行焊接,第一弯摇臂2311b另一端与车架主体111进行枢接。第二水平摇臂2312a一端的第二枢转轴2312c与第二行走轮组122进行枢接,第二水平摇臂2312a另一端与车架主体111进行枢接,第二弯摇臂2312b和第二水平摇臂2312a进行焊接,第二弯摇臂2312b另一端与车架主体111进行枢接。
43.小型的全地形车100车架主体111的布置空间有限,为了节省车架主体111的布置空间,在车架主体111上不再设置摇臂横梁及设于摇臂横梁上的u形安装座。图10所示,在车架主体111上固定焊接摇臂安装座2313,第一摇臂组件2311和第二摇臂组件2312通过枢转结构安装在摇臂安装座2313上。具体地,第一摇臂组件2311通过第一枢转轴2311c安装在摇臂安装座2313上,第二摇臂组件2312通过第二枢转轴2312c安装在摇臂安装座2313上。在枢转结构的另一端,即第一摇臂组件2311和第二摇臂组件2312相结合的位置处,还设有装配式支架2314。即第一枢转轴2311c的一端与摇臂安装座2313相连,第一枢转轴2311c的另一端与装配式支架2314相连,第二枢转轴2312c的一端与摇臂安装座2313相连,第二枢转轴2312c的另一端与装配式支架2314相连。通过在车架主体111上取消摇臂横梁,第一摇臂组件2311和第二摇臂组件2312通过枢接结构安装在摇臂安装座2313与装配式支架2314之间,提高第一摇臂组件2311和第二摇臂组件2312与车架主体111连接强度,简化了车架主体111的管梁布置结构。
44.作为一种实现方式,如图9和图10所示,第一减震器233与前悬架231相互连接,第二减震器234与后悬架232相互连接。第一减震器233的一端连接有车架主体111前端连接,第一减震器233另一端与前悬架231连接。第二减震器234的一端与车架主体111的后端连接,第二减震器234另一端与第一行走轮组121相连接。第一减震器233可以使第二行走轮组122在垂直与接触平面107的方向跳动,第二减震器234可以使第一行走轮组121在垂直于接触平面107的方向跳动。在第一减震器233和第二减震器234的作用下,第一行走轮组121和第二行走轮组122具有第一状态位置和第二状态位置,第一状态位置为全地形车100处于最大承载量时第一行走轮组121和第二行走轮组122所处的极限位置(如图11所示),第二状态位置为全地形车100在空车状态下第一行走轮组121和第二行走轮组122所处的位置(如图12所示)。
45.作为一种实现方式,如图13所示,驱动电机191安装于车架主体111上,驱动电机191与车架主体111通过电机安装座192相连接。电机安装座192包括第一安装座1921和第二安装座1922。第一安装座1921包括固定支架1921a和中间连接架1921b,固定支架1921a与车
架主体111进行焊接。作为一种实现方式,第一安装座1921上包括两个固定支架1921a,两个固定支架1921a为板状结构,中间连接架1921b通过螺栓安装在两个固定支架1921a之间。在中间连接架1921b上还设有电机支架1921c。在第二主梁架1112的第二水平梁1112a上还设有第二安装座1922,第二安装座1922与第二主梁架1112的第二水平梁1112a进行焊接。驱动电机191通过电机支架1921c和第二安装座1922安装在在车架主体111上。通过将第一安装座1921设成分体式结构,在小型全地形车100的内部空间有限的情况下,方便驱动电机191安装与拆卸,同时提高了驱动电机191安装时调整的便利性。驱动电机191与所有电机支架1921c之间分别相互固定,电机支架1921c通过焊接的方式与中间连接架1921b连接,电机支架1921c通过焊接的方式与第二安装座1922连接。沿前后方向,第二安装座1922设于第一安装座1921的前方;沿竖直方向,第一安装座1921设于第二安装座1922的上方。中间连接架1921b上设有两个沿左右方向对称设置的电机支架1921c,第二主梁架1112的第二水平梁1112a上设有两个沿左右方向对称设置的电机支架1921c。以电机安装座中电机支架1921c所在的平面为安装平面,安装平面与接触平面的夹角为大于等于30
°
且小于等于90
°
。进一步地,以电机安装座192中电机支架1921c所在的平面为安装平面,安装平面与接触平面的夹角为大于等于40
°
且小于等于80
°
。驱动电机191包括输出轴,输出轴的轴线位于安装平面上。
46.作为一种实现方式,如图14所示,第一主梁架1111包括第一水平梁1111a,在第一主梁架1111的第一水平梁1111a上设有鞍座支撑座1111b,鞍座支撑梁1111c通过鞍座支撑座1111b安装在第一主梁架1111的第一水平梁1111a上。鞍座支撑梁1111c与鞍座支撑座1111b之间通过可拆卸或不可拆卸的连接方式相互连接,具体地,可拆卸的连接方式为螺纹连接、销连接或键连接,不可拆卸的连接方式为铆接或焊接。在鞍座支撑梁1111c设有限位架1111d,限位架1111d为u形,限位架111d与鞍座支撑梁1111c形成口型结构安装区。限位架设于鞍座支撑梁的正下方,或者限位架设于鞍座支撑梁的后下方。当鞍座组件15安装在鞍座支撑梁1111c上时形成口型结构的限位结构,通过口型结构的限位结构将鞍座组件15限位在鞍座支撑梁1111c上,以限制鞍座组件15在第一方向101上移动。鞍座组件15的支撑梁与车架主体111为分体式设计,更利于车架主体111的堆叠存放,减少了车架主体111的存放空间。如图15所示,鞍座组件15包括鞍座151及设于鞍座151底部的固定卡扣155、电源限位件156和鞍座锁钩153。鞍座锁钩153、电源限位件156与固定卡扣155沿第一方向101依次设置在鞍座151的底部。固定卡扣155和鞍座锁钩153分别设置在鞍座151底部的前后两端,固定卡扣155和鞍座锁钩153同时作用,能够将鞍座组件15固定在车架11上。当鞍座组件被锁定在车架上时,固定卡扣155固定在安装区内并与限位架连接。如图16所示,刹车组件171包括第一刹车组件1711、第二刹车组件1712、制动钳1713、分流阀1714以及制动三通阀1715,制动钳1713包括第一制动钳1713a、第二制动钳1713b。操纵第一刹车组件1711时,第一刹车组件1711泵出的油经过分流阀1714流向第一制动钳1713a,控制第一制动钳1713a进行制动。在操纵第二刹车组件1712时,第二刹车组件1712的液体输出端分两路,一路与分流阀1714相通,用于控制第一制动钳1713a进行制动,另一路通过制动三通阀1715与第二制动钳1713b相通,控制第二制动钳1713b进行制动。第一刹车组件1711和第二刹车组件1712用于接受驾驶者的操作,向制动钳1713输出液压油。第一刹车组件1711和第二刹车组件1712应当包括输送泵1716、油杯1717以及用于驱动输送泵1716的操纵机构1718,其中,油杯1717用
于盛放液压油,油杯1717可以与输送泵1716为一体结构,也可以采用分体结构。输送泵1716采用类似于柱塞泵的结构,利用驾驶者对操纵机构1718的操作,如通过手刹装置1718a、脚刹1718b的操作从而从油杯1717中吸油并输出。
47.作为一种实现方式,第二刹车组件1712为手刹装置1718a,第一刹车组件1711为脚刹1718b,第二刹车组件1712安装在第一手把2211或是第二手把2212上。示例性的,第二刹车组件1712安装在第二手把2212上,通过对第二刹车组件1712进行操纵,油杯1717中液压油通过输油泵输入至第二制动钳1713b,控制第二制动钳1713b进行制动。如图17所示,第二制动钳1713b的数量为两个,分别安装在不同的第一行走轮组121上,油杯1717中的油经过输油泵吸出后经过第一油管1715a进入至制动三通阀1715内,制动三通阀1715将第一油管1715a输入的液压油又分成两路,通过第二油管1715b和第三油管1715c输入至两个第二制动钳1713b内,分别对行走组件12进行制动控制。现有技术中,制动三通阀1715的布置不合理,在全地形车100行驶过程中,第二油管1715b和第三油管1715c跟随全地形车100一起颠簸起伏,第二油管1715b和第三油管1715c的跳动较大,影响行走组件12的制动效果。为了解决上述的问题,将制动三通阀1715设置第一水平摇臂2311a和第二水平摇臂2312a的枢转轴之间。第一水平摇臂2311a枢转中心和第二水平摇臂2312a枢转中心的连线所在的平面为预设平面,并且预设平面平行于接触平面107,预设平面为零点位置,制动三通阀1715在预设平面的上方为正,在预设平面的下方为负,制动三通阀1715与预设平面的距离大于或等于负60mm且小于或等于正60mm,且制动三通阀1715在第一方向101上的前端不超过车架11在第一方向101上前端,制动三通阀1715在第一方向101的后端不超过转向轴181在第一方向101的后端。进一步地,制动三通阀1715与预设平面的距离大于或等于负40mm且小于或等于正40mm,且制动三通阀1715在第一方向101上的前端不超过车架11在第一方向101上前端,制动三通阀1715在第一方向101的后端不超过转向轴181在第一方向101的后端。更进一步地,制动三通阀1715与预设平面的距离大于或等于负20mm且小于或等于正20mm,且制动三通阀1715在第一方向101上的前端不超过车架11在第一方向101上前端,制动三通阀1715在第一方向101的后端不超过转向轴181在第一方向101的后端。
48.作为一种实现方式,如图17所示,在第一水平摇臂2311a靠近与行走组件12枢接的位置设有油管安装座2315,在第二水平摇臂2312a且靠近与行走组件12枢接的位置设有油管安装座2315。第二油管1715b通过油管安装座2315安装在第一水平摇臂2311a上,第三油管1715c通过油管安装座2315安装在第二水平摇臂2312a上。通过将第二油管1715b和第三油管1715c固定在靠近行走组件12的位置,减少了第二油管1715b和第三油管1715c在车轮跳动时的伸缩量,提高了制动组件17的制动效果,同时这样的布置实现了对油管管路的对称布置,简化了油管布置结构,使油管管路结构更精简和合理。
49.应当理解的是,对于本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本实用新型所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1