一种桶装水上楼机的制作方法
1.本实用新型涉及上楼机,特别涉及一种桶装水上楼机。
背景技术:
2.上楼机一般依靠一对三角轮、驱动三角轮转动的电机,再配合人工握住手握杆,实现爬楼梯的操作,方便将一些重物上楼,对于没有电梯的情况,是一种非常实用的工具。对于桶装水,一般一次需要放置多桶桶装水,现有的上楼机不方便放置。
技术实现要素:
3.本实用新型的目的是提供一种桶装水上楼机,设计两个可以收拢支腿,通过两个支腿,配合三角轮,使放置架保持平整,具有方便放置的优点。
4.本实用新型的上述技术目的是通过以下技术方案得以实现的:
5.一种桶装水上楼机,包括放置架、转动连接于放置架底面靠后位置的转轴、设置于转动左右两端的两个三角轮、驱动转轴的电机一、固设于放置架前侧面的手握杆,其特征在于,还包括两个支腿,两个所述支腿呈镜像对称,两个支腿的端部分别铰接于放置架左右两侧面的靠前位置,两个支腿上还均滑动连接有滑动套,两个滑动套上均铰接有铰接条,两个铰接条的另一端之间固设有连接轴,连接轴转动连接于放置架的底面,所述放置架上还设置有驱动连接轴转动的驱动机构。
6.采用上述技术方案,通过转动连接轴,带动两个铰接条一起转动,再通过两个滑动套,带动两个支腿转动,配合两个三角轮,使放置板保持水平,方便放置桶装水,在爬楼梯时,重新将两个支腿收拢。
7.作为优选,两个滑动套之间还固设有连接条一,所述连接条一远离放置架的侧面呈倾斜状态,该侧面上还设置有两个万向轮。
8.采用上述技术方案,因为在支腿转动的过程中,滑动套沿着支腿移动,也就是连接条一和两个万向轮也会跟着支腿改变相对位置,所以可以设计两个位置,在位置一上,万向轮相对高于支腿,支腿抵住地面,用于支持,配合两个三角轮,使放置板保持水平,方便放置桶装水;在位置二上,万向轮超出支腿,抵住地面,方便在平地上移动。
9.作为优选,当两个所述支腿呈竖直朝下的状态,并和地面抵住时,所述放置架呈水平状态,两个万向轮呈倾斜状态,且两个万向轮和地面之间留有间距。
10.采用上述技术方案,支腿竖直朝下作为位置一,支撑稳定,也方便确定支腿的具体长度。
11.作为优选,两个所述支腿端部还设置有限位块,当两个所述支腿呈竖直朝下的状态,并和地面抵住时,滑动套和限位块之间还留有间距。
12.采用上述技术方案,即根据支腿的具体长度,设计好铰接条的长度,当支腿转动到竖直朝下后,还可以继续转动一定的角度,而限位块用于确定位置二。
13.作为优选,当所述滑动套和限位块抵住时,两个所述支腿呈朝后的倾斜状态,两个
所述万向轮超出支腿,并和地面抵住。
14.采用上述技术方案,万向轮和地面抵住,方便整个装置在平地上移动。
15.作为优选,当所述滑动套和限位块抵住时,连接条一的倾斜呈水平状态。
16.采用上述技术方案,方便万向轮转动。
17.作为优选,控制电机一、旋转缸的开关一、开关二设置在所述手握杆。
18.采用上述技术方案,方便在握住手握杆的同时,控制电机一、旋转缸。
附图说明
19.图1为实施例结构示意图;
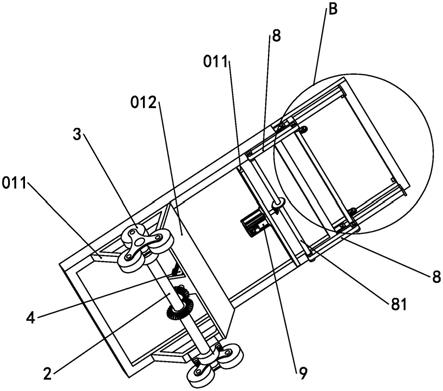
20.图2为实施例a部分放大示意图;
21.图3为实施例仰视的示意图;
22.图4为实施例b部分放大示意图;
23.图5为实施例支腿和地面抵住的示意图;
24.图6为实施例万向轮和地面抵住的示意图;
25.图7为实施例万向轮和地面抵住时的局部剖视图。
26.附图标记:1、放置架;011、安装部分;012、电机安装板一;013、电机安装板二;014、连接耳;2、转轴;3、三角轮;4、电机一;5、手握杆;51、开关一;52、开关二;6、支腿;61、限位块;7、滑动套;8、铰接条;81、连接轴;9、旋转缸;10、连接条一;11、万向轮。
具体实施方式
27.以下所述仅是本实用新型的优选实施方式,保护范围并不仅局限于该实施例,凡属于本实用新型思路下的技术方案应当属于本实用新型的保护范围。同时应当指出,对于本技术领域的普通技术人员而言,在不脱离本实用新型原理前提下的若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
28.如图1到图4所示,一种桶装水上楼机,包括放置架1、转轴2、两个三角轮3、电机一4、手握杆5。其中,放置架1底面靠后侧的位置上固设有两个安装部分011,转轴2转动连接于两个安装部分011,且转轴2的两端分别穿出两个安装部分011,两个三角轮3分别固设于转轴2的两个穿出端部。两个安装部分011之间还设置有电机安装板一012,电机一4固定连接于电机安装板一012,并通过一对啮合的锥齿轮一,驱动转轴2转动。手握杆5呈凹形,固定连接于放置架1前侧面。
29.还包括两个支腿6,两个支腿6一左一右呈镜像对称设置,两个支腿6的端部分别铰接于放置架1左右两侧面的靠前位置。具体地,放置架1前侧面固设有两个连接耳014,两个连接耳014分别在手握杆5两端的下侧位置,两个支腿6的端部分别铰接于两个连接耳014。两个支腿6上还均滑动连接有滑动套7,两个滑动套7上均铰接有铰接条8。两个铰接条8的另一端之间固设有连接轴81,连接轴81转动连接于放置架1的底面。放置架1上还设置有驱动连接轴81转动的旋转缸9。旋转缸9,通过一对啮合的锥齿轮二,驱动接轴一转动。这样,通过转动连接轴81,带动两个铰接条8一起转动,再通过两个滑动套7,带动两个支腿6转动。
30.另外,控制电机一4、旋转缸9的开关一51、开关二52设置在手握杆5,方便在握住手握杆5的同时,控制电机一4、旋转缸9。
31.另外,两个滑动套7之间还固设有连接条一10,连接条一10远离放置架1的侧面呈倾斜状态,该侧面上还设置有两个万向轮11。因为在支腿6转动的过程中,滑动套7沿着支腿6移动,也就是连接条一10和两个万向轮11也会跟着支腿6改变相对位置,所以可以设计支腿6的两个位置,在位置一上,万向轮11相对高于支腿6,支腿6抵住地面,用于支持,配合两个三角轮3,使放置板保持水平,方便放置桶装水;在位置二上,万向轮11超出支腿6,抵住地面,方便在平地上移动。
32.结合上述万向轮11的设计,具体地,如图5所示,当两个支腿6呈竖直朝下的状态时,和地面抵住,此时,放置架1呈水平状态,两个万向轮11呈倾斜状态,且两个万向轮11和地面之间留有间距。对应上述的位置一,支腿6竖直朝下,支撑稳定,也方便确定支腿6的具体长度。
33.支腿6端部还设置有限位块61,当两个支腿6呈竖直朝下的状态,并和地面抵住时,滑动套7和限位块61之间还留有间距。即根据支腿6的具体长度,设计好铰接条8的长度,当支腿6转动到竖直朝下后,还可以继续转动一定的角度,而限位块61用于确定位置二。
34.支腿6先转动到竖直朝下,再继续转动一定角度后,滑动套7和限位块61抵住。此时,如图6所示,两个支腿6呈朝后的倾斜状态,两个万向轮11超出支腿6,并和地面抵住,如图7所示,连接条一10的倾斜呈水平状态,方便万向轮11转动。
35.简述本实用新型的工作过程,先使支腿6处于位置一,将一定量的桶装水放置到放置架1上,再配合绑带等,固定桶装水;接着通过手握杆5,使放置架1相对转轴2转动,支腿6离地,再使支腿6处于位置二,放下放置架1,万向轮11抵住地面,移动至楼梯口;最后通过手握杆5,使放置架1相对转轴2转动,收拢支腿6,通过三角轮3进行爬楼梯。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1