电动助力转向装置的控制装置及控制方法与流程
1.本发明涉及电动助力转向装置的控制装置以及控制方法。
背景技术:
2.近年来,与自动驾驶的等级对应地,出现了搭载有各种驾驶辅助功能的车辆。作为驾驶辅助功能的例子,可列举出基于高级驾驶辅助系统(adas:advanced driver-assistance systems)的车道保持功能、车道变更功能等。基于这样的状况,需要根据驾驶辅助功能的内容来进行对电动助力转向装置的控制。
3.在上述那样的驾驶辅助功能正在工作的状态下,设想驾驶员对方向盘进行操作。在这样的情况下,需要调整由驾驶辅助功能实现的控制值和基于驾驶员操舵的控制值。例如,在专利文献1中公开了如下方法:设定与转向转矩对应的控制值与基于自动操舵功能的控制值的比率,并基于该比率来调整控制值,来控制电动助力转向装置的马达。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2008-068677号公报
技术实现要素:
7.发明欲解决的技术问题
8.在电动助力转向装置中,在进行控制时,有时在基于驾驶员的转向转矩的指令值中包括例如对由来自电动助力转向装置的下游侧(轮胎侧)的输入而引起的振动进行抑制那样的信号。在这样的结构中,在随着使基于上述那样的自动转向功能的控制值优先而使基于转向转矩的指令值的比率降低的情况下,抑制振动的信号也被降低,其振动抑制效果降低。其结果是会产生振动,并经由方向盘向驾驶员传递不舒适的振动,对驾驶员的操作性也产生影响。另外,在上述的驾驶辅助功能中,利用了对电动转向装置的操作信息,例如手部握住/手部离开检测等,但由于产生振动,也会对这些操作检测产生影响。
9.鉴于上述课题,本发明的目的在于,考虑到驾驶辅助功能,以简易的结构高效地抑制振动。
10.用于解决问题的技术手段
11.为了解决上述问题,本发明具有以下的结构。即,一种电动助力转向装置的控制装置,其特征在于,具备:
12.第一控制部,所述第一控制部基于对所述电动助力转向装置的转向轴施加的转向转矩来导出第一指令值;
13.第二控制部,所述第二控制部基于针对驾驶辅助功能的目标指令值,导出第二指令值;以及
14.合成部,所述合成部对所述第一指令值和所述第二指令值进行合成,生成所述电动助力转向装置的指令值,
15.所述第一控制部包括:
16.导出部,所述导出部由所述转向转矩导出包含振动抑制成分的指令值;
17.提取部,所述提取部从由所述导出部导出的指令值中提取与所述振动抑制成分对应的指令值;
18.调整部,所述调整部根据所述第二控制部的功能的工作状态,对由所述导出部导出的指令值进行调整;以及
19.加法部,所述加法部通过将由所述调整部调整后的指令值与由所述提取部提取出的指令值相加来生成所述第一指令值。
20.另外,本发明另一方式具有以下的结构。即,一种电动助力转向装置的控制方法,其特征在于,包括:
21.第一导出工序,基于对所述电动助力转向装置的转向轴施加的转向转矩,导出第一指令值;
22.第二导出工序,基于针对驾驶辅助功能的目标指令值,导出第二指令值;以及
23.合成工序,合成所述第一指令值和所述第二指令值,生成所述电动助力转向装置的指令值,
24.在所述第一导出工序中,
25.从所述转向转矩导出包含振动抑制成分的指令值,
26.从所述被导出的指令值中提取与所述振动抑制成分对应的指令值,
27.根据所述第二导出工序的工作状态,调整所述被导出的指令值,
28.通过对所述被调整后的指令值加上所述提取出的指令值从而生成所述第一指令值。
29.发明效果
30.根据本发明,本发明能够考虑到驾驶辅助功能,以简易的结构高效地抑制振动。
附图说明
31.图1是表示本发明所涉及的电动助力转向装置的概要结构的例子的结构图。
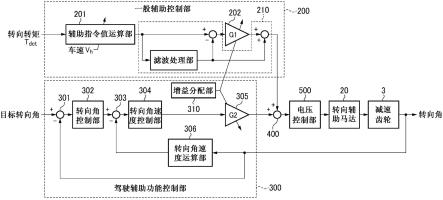
32.图2是表示现有例中的功能结构的一例的框图。
33.图3是表示基于转向转矩的一般辅助的功能结构的例子的框图。
34.图4是表示本实施方式所涉及的转换表的结构例的图。
35.图5是表示本发明的第一实施方式所涉及的功能结构的一例的框图。
36.图6是表示本发明的第一实施方式所涉及的一般辅助侧的功能结构的例子的框图。
37.图7是本发明的第一实施方式所涉及的处理的流程图。
38.图8是示出根据本发明的第二实施例所涉及的功能配置的示例的框图。
39.图9a是表示本发明的第二实施方式所涉及的转换表的结构例的图。
40.图9b是表示本发明的第二实施方式所涉及的转换表的结构例的图。
41.图10是根据本发明的第二实施例所涉及的处理的流程图。
42.符号说明
43.1 方向盘
44.2 转向轴
45.3 减速齿轮
46.4a、4b 万向接头
47.5 小齿轮齿条机构
48.6a、6b 拉杆
49.7a、7b 轮毂单元
50.8l、8r 转向车轮
51.9 扭杆
52.10 转矩传感器
53.11 点火器(ing)钥匙
54.12 车速传感器
55.13 电池
56.14 转向角传感器
57.20 转向辅助马达
58.30 eps(electric power steering,电动助力转向)-ecu(electronic control unit,电子控制单元)
59.200 一般辅助控制部
60.201 辅助指令值运算部
61.202 增益设定部
62.210 滤波部
63.211 滤波处理部
64.212、213、305 增益设定部
65.214、301、303 减法器
66.215、400 加法器
67.230 信号转换部
68.300 驾驶辅助功能控制部
69.302 转向角控制部
70.304 转向角速度控制部
71.306 转向角速度运算部
72.310 增益分配部
73.320 不灵敏区设定部
74.500 电压控制部
具体实施方式
75.以下,参照附图等对具体实施方式进行说明。此外,以下说明的实施方式是用于说明本发明的一个实施方式,并不意图限定解释本发明,另外,各实施方式中说明的全部结构不一定是为了解决本发明的课题而必须的结构。另外,在各附图中,对于相同的构成要素,通过标注相同的附图标记来表示对应关系。
76.《第一实施方式》
77.以下,对本发明的第一实施方式进行说明。
78.[结构概要]
[0079]
图1表示第一实施方式所涉及的电动助力转向装置的结构例。方向盘1是用于供驾驶员进行转向操作的转向轮。方向盘1的转向轴2经由构成减速机构的减速齿轮(蜗轮)3、万向接头4a、4b、小齿轮齿条机构5、拉杆6a、6b,进而经由轮毂单元7a、7b与转向车轮8l、8r连结。
[0080]
转向轴2被构成为经由扭杆9将方向盘1侧的输入轴与小齿轮齿条机构5侧的输出轴连结。小齿轮齿条机构5具有:小齿轮5a,其与从万向接头4b传递转向力的小齿轮轴(未图示)连结;以及齿条5b,其与小齿轮5a啮合。传递到小齿轮5a的旋转运动被齿条5b转换为车宽方向的直线运动。
[0081]
在转向轴2设置有转矩传感器10,该转矩传感器10检测对扭杆9施加的转向转矩t
dct
。另外,在转向轴2设置有转向角传感器14,该转向角传感器14对表示转向轴2的方向盘1侧(输入轴侧)的绕轴的旋转角的转向角θh进行检测。另外,在转向轴2设置有输出轴角传感器15,该输出轴角传感器15检测表示转向轴2的小齿轮齿条机构5侧(输出轴侧)的绕轴的旋转角的输出轴角θc的。即,转向角传感器14检测输入轴侧的对扭杆9的旋转角作为转向角θh,输出轴角传感器15检测输出轴侧的对扭杆9的旋转角作为输出轴角θc。转矩传感器10基于因转向角θh与输出轴角θc之差而产生的扭杆9的扭转,来检测转向转矩t
dct
。另外,转向角传感器14和输出轴角传感器15也可以是一体构成的传感器。另外,在图1中,为了容易说明,分开示出转向轴2和转矩传感器10,但也可以是转向轴2和转矩传感器10成为一体的结构。转矩传感器10的结构没有特别限定,例如,可以使用根据扭杆9的扭转来检测转矩的套筒类型、环形类型等。在以下的说明中,也将转向轴2的方向盘1侧称为上游侧,将小齿轮齿条机构5侧称为下游侧。
[0082]
在由转矩传感器10检测出的转向转矩t
dct
中,除了基于驾驶员对方向盘1的操作而产生的驾驶员转矩之外,还包括由于来自下游侧的输入(干扰等)而产生的转矩。对基于转向转矩t
dct
的指令值进行校正,以抑制由于下游侧的输入而引起的振动。关于这里的控制,使用附图在后面叙述。
[0083]
辅助对方向盘1的转向力的转向辅助马达20经由减速齿轮3而与转向轴2连结。从蓄电池13向作为控制电动助力转向(eps:electric power steering)装置的控制器的eps-ecu(electronic control unit:电子控制单元)30供给电力,并且经由点火(ign)钥匙11输入点火钥匙信号。另外,对转向轴2施加转向辅助力的机构不限于马达,也可以利用各种种类的致动器。
[0084]
eps-ecu 30基于由转矩传感器10检测出的转向转矩t
dct
、以及由车速传感器12检测出的车速vh进行作为辅助指令值的电流指令值的运算。而且,eps-ecu 30通过与基于转向转矩t
dct
的电流指令值和基于驾驶辅助功能的电流指令值对应的电压控制指令值v
ref
来控制向转向辅助马达20供给的电力。转向辅助马达20基于从eps-ecu 30输入的电压控制指令值v
ref
,使减速齿轮3工作,对方向盘1进行辅助控制。
[0085]
本实施方式的电动助力转向装置例如能够搭载于可通过自动驾驶(ad:autonomous driving)、adas进行行驶控制的车辆(未图示)。作为驾驶辅助功能,可列举出基于adas功能的车道保持功能、车道变更功能等,但其种类并无特别限定。在以下的说明
中,以adas功能为例进行说明。本实施方式所涉及的驾驶辅助功能至少通过除了驾驶员操舵以外进行电动助力转向装置的转向角控制以作为自动转向功能,来提供。因此,eps-ecu 30也进行与由车辆提供的驾驶辅助功能对应的电流指令值的运算。
[0086]
eps-ecu 30例如可以具备计算机,该计算机包括处理器和存储装置等周边部件。处理器例如可以是cpu(central processing unit:中央处理单元)或mpu(micro-processing unit:微处理单元)。存储装置可以具备半导体存储装置、磁存储装置以及光学存储装置中的任一个。存储装置可以包括寄存器、高速缓冲存储器、用作主存储装置的rom(read only memory:只读存储器)以及ram(random access memory:随机存取存储器)等存储器。以下说明的eps-ecu 30的功能例如通过使eps-ecu 30的处理器执行存储于存储装置中的计算机程序来实现。
[0087]
需要说明的是,eps-ecu 30也可以由用于执行以下说明的各信息处理的专用硬件来形成。例如,eps-ecu 30也可以具备在通用的半导体集成电路中设定的功能性的逻辑电路。例如,eps-ecu 30也可以具有现场可编程门阵列(fpga:field-programmable gate array)等可编程逻辑器件(pld:programmable logic device)等。
[0088]
[功能结构]
[0089]
首先,对现有的功能结构的例子进行说明。图2是表示现有例中的eps-ecu 30的功能结构的一例的框图。在此,构成为包括:一般辅助控制部200,其基于由转矩传感器10检测出的转向转矩t
dct
来输出辅助指令值;以及驾驶辅助功能控制部300,其根据基于adas功能等的目标转向角来输出指令值。目标转向角被从综合adas功能的adas-ecu(未图示)提供给eps-ecu 30。此外,adas-ecu(未图示)也可以具备与eps-ecu 30相同的硬件结构。从一般辅助控制部200和驾驶辅助功能控制部300分别输出的指令值被加法器400相加,并输出到电压控制部500。电压控制部500基于已输入的指令值,输出用于控制转向辅助马达20的电压控制指令值v
ref
。一般辅助控制部200、驾驶辅助功能控制部300、加法器400以及电压控制部500由eps-ecu 30实现。
[0090]
一般辅助控制部200构成为包括辅助指令值运算部201以及增益设定部202。辅助指令值运算部201基于转向转矩t
dct
以及搭载有电动助力转向装置的车辆(未图示)的车速vh,进行辅助指令值的运算。搭载有电动助力转向装置的车辆(未图示)的车速vh从车速传感器12获取。关于由辅助指令值运算部201进行的辅助指令值的运算,使用图3在后面叙述。从辅助指令值运算部201输出的辅助指令值被输入到增益设定部202。增益设定部202基于由后述的增益分配部310设定的增益g1进行辅助指令值的调整,向加法器400输出辅助指令值。
[0091]
驾驶辅助功能控制部300构成为包括减法器301、转向角控制部302、减法器303、转向角速度控制部304、增益设定部305、转向角速度运算部306以及增益分配部310。减法器301从作为输入值的目标转向角中减去当前输出的转向角。由此,求出作为控制量的转向角偏差。转向角控制部302基于从减法器301输出的转向角偏差导出目标转向角速度,并输出至减法器303。减法器303从由转向角控制部302输出的目标转向角速度中减去由转向角速度运算部306输出的转向角速度,并向转向角速度控制部304输出。转向角速度控制部304基于从减法器303输出的转向角速度偏差,运算指令值,并输出至增益设定部305。增益设定部305基于由增益分配部310设定的增益g2来进行指令值的调整,并向加法器400输出指令值。
转向角速度运算部306基于当前输出的转向角来运算转向角速度,并向减法器303输出转向角速度。
[0092]
增益分配部310对一般辅助控制部200和驾驶辅助功能控制部300中使用的增益进行分配。在adas功能未工作的情况下,基于驾驶辅助功能控制部300的转向控制不工作,因此将一般辅助控制部200侧的增益g1分配为100%,将驾驶辅助功能控制部300侧的增益g2分配为0%。另一方面,在adas功能进行工作的情况下,基于驾驶辅助功能控制部300的转向控制进行工作,例如,将一般辅助控制部200侧的增益g1分配为40%,将驾驶辅助功能控制部300侧的增益g2分配为60%。这里的分配比例(混合比率)没有特别限定,例如可以根据由adas功能提供的各种功能(车道保持功能、车道变更功能等)中的工作的功能而变动。
[0093]
另外,在图2的结构中,为了控制转向角速度,采用了包括减法器303、转向角速度控制部304以及转向角速度运算部306的结构,但也可以省略它们。在该情况下,由转向角控制部302运算指令值,向增益设定部305输入指令值。
[0094]
另外,在本实施方式中,说明了基于目标转向角对驾驶辅助功能控制部300进行转向角控制的例子,但并不限定于此。驾驶辅助功能控制部300也可以构成为,作为目标指令值,例如将目标辅助转矩作为输入,运算与目标辅助转矩相当的指令值。在该情况下,驾驶辅助功能控制部300具备与目标辅助转矩对应的各种控制部以及运算部。
[0095]
图3是用于说明一般辅助控制部200的振动抑制功能的概略图。一般辅助控制部200构成为包括:信号转换部203、近似微分部204、增益设定部205以及加法器206。
[0096]
信号转换部203保持预先定义了所输入的转向转矩t
dct
与输出的指令值i
ref
的对应关系的表。然后,信号转换部203参照该表,导出与已输入的转向转矩t
dct
对应的指令值i
ref
。图4表示在信号转换部203中使用的表的例子。在转向转矩t
dct
为0附近的情况下,将指令值i
ref
的值也设为0。这是为了防止从转向转矩t
dct
的基准位置到规定的范围内的偏移的输出,在转向转矩t
dct
的值小的情况下控制为不进行指令值i
ref
的输出。将指令值i
ref
设为0的转向转矩t
dct
的范围没有特别限定,但被预先规定。由信号转换部203导出的指令值i
ref
被向加法器206输出。
[0097]
另外,转向转矩t
dct
与指令值i
ref
的对应关系能够根据搭载有电动助力转向装置的车辆(未图示)的车速vh而变化。在图4中,示出了表示对应关系的两个曲线c1、c2。曲线c2是表示车速vh更慢的情况下的转向转矩t
dct
与指令值i
ref
的对应关系的曲线。如图4所示,车速vh越低,即使是相同的转向转矩t
dct
,指令值i
ref
的值也被控制为越大。换言之,在车速vh高的情况下,即使输入相同的转向转矩t
dct
,与车速vh低的情况相比,指令值i
ref
也被抑制而输出。另外,在此表示使用了表的例子,但也可以代替表而使用预先规定的转换式来导出成为输出的指令值i
ref
。
[0098]
一般辅助控制部200还具备近似微分部204和增益设定部205。近似微分部204通过对输入的转向转矩t
dct
的变化量进行近似微分来导出指令值。并且,相对于该微分值,增益设定部205应用基于由车速传感器12得到的车速vh而规定的增益g。然后,增益设定部205将指令值向加法器206输出。加法器206将参照图4所示的表而导出的指令值i
ref
与从增益设定部205得到的指令值相加,并作为辅助指令值向增益设定部202输出。通过近似微分部204和增益设定部205,生成用于抑制因干扰等引起的振动的指令值,并反映在指令值i
ref
中。例如,在因干扰而使图1所示的扭杆9扭转的情况下,由近似微分部204以及增益设定部205生
[0116]
p6=g1*(a+v
1-g4*v2)
[0117]
p7=g3*v2+g1*(a+v
1-g4*v2)=y
[0118]
对y进行整理,
[0119]
y=g1*a+g1*v1+(g3-g1*g4)*v2(1)。
[0120]
在此,右边的第二项和第三项相当于用于振动抑制的指令值,在滤波处理部211的通带中v1=v2。即,从滤波处理部211仅提取并输出用于振动抑制的指令值。理想的是将式(1)的第二项和第三项的指令值作为y的指令值直接输出,除去与静态成分a有关的项而表示的话,如式(2)那样进行改写。
[0121]
g1*v1+(g3-g1*g4)*v1=v1(2)
[0122]
g1+(g3-g1*g4)=1(3)
[0123]
g3=1-g1*(1-g4)(4)
[0124]
此外,也可以是省略图6所示的增益设定部213和减法器214那样的结构。在该情况下,g4=0,基于式(4),
[0125]
g3=1-g1(5)。
[0126]
在该情况下,根据增益设定部202的增益g1来规定增益设定部212的增益g3。例如,在增益设定部202的增益g1为40%的情况下,增益设定部212的增益g3为60%。
[0127]
另一方面,在不省略减法器214等的情况下,且g4=1的情况下,基于式(4),
[0128]
g3=1(6)。
[0129]
在该情况下,省略了增益设定部212和增益设定部213的处理,成为与滤波处理部211的输出直接输出到加法器215以及减法器214的情况相同的结构。
[0130]
[处理流程]
[0131]
图7是本实施方式所涉及的eps-ecu30的处理的流程图。如上所述,本处理流程例如通过由eps-ecu30所具备的cpu(未图示)读取并执行存储于存储装置(未图示)的程序来实现。
[0132]
在s701中,eps-ecu30判定adas功能是否正在工作。作为此处的判定对象的adas功能可以以与电动助力转向装置的控制相关联的adas功能为对象判定是否正在工作,也可以以整体adas功能为对象判定是否正在工作。在adas功能正在工作的情况下(s701:“是”),eps-ecu30的处理进入s703。另一方面,在adas功能未工作的情况下(s701:“否”),eps-ecu30的处理进入s702。
[0133]
在s702中,eps-ecu30通过增益分配部310将一般辅助控制部200的增益设定部202的增益g1设定为100%。在该情况下,驾驶辅助功能控制部300不工作。因此,驾驶辅助功能控制部300的增益设定部305的增益g2被设定为0%。之后,eps-ecu30的处理进入s704。
[0134]
在s703中,eps-ecu30通过增益分配部310对一般辅助控制部200的增益设定部202的增益g1和驾驶辅助功能控制部300的增益设定部305的增益g2进行增益的分配。分配的比例可以使用根据在s701中判定为正在工作的adas功能的种类而规定的比例,也可以与adas功能的种类无关地使用恒定的比例。之后,eps-ecu30的处理进入s704。
[0135]
在s704中,eps-ecu30从各种传感器获取转向转矩t
dct
以及车速vh。
[0136]
在s705中,eps-ecu30基于在s704中获取的转向转矩t
dct
以及车速vh,通过一般辅助控制部200导出辅助指令值。这里的导出方法与使用图3和图4说明的方法相同。
[0137]
在s706中,eps-ecu 30针对在s705中导出的辅助指令值,通过滤波处理部211进行滤波处理。如上所述,滤波处理可以使用hpf,也可以使用bpf。在此得到的指令值相当于由辅助指令值运算部201赋予的用于振动抑制的指令值。
[0138]
在s707中,eps-ecu 30从在s705中得到的辅助指令值中减去在s706中得到的指令值。本工序对应于图6所示的减法器214的工作。
[0139]
在s708中,eps-ecu 30通过增益设定部202对在s707中得到的指令值进行增益控制。
[0140]
在s709中,eps-ecu 30对在s708中进行了增益控制的指令值加上在s706中得到的指令值。本工序对应于图6所示的加法器215的工作。
[0141]
在s710中,eps-ecu 30将在s709中得到的辅助指令值向加法器400输出。此时,在adas功能正在工作的情况下,加法器400将从驾驶辅助功能控制部300输出的指令值与在s709中得到的辅助指令值相加,并向电压控制部500输出。另一方面,在adas功能未工作的情况下,由于不从驾驶辅助功能控制部300侧输出指令值,因此加法器400将在s709中得到的辅助指令值直接向电压控制部500输出。然后,电压控制部500基于输入的指令值,输出用于控制转向辅助马达20的电压控制指令值v
ref
。然后,结束本处理流程。
[0142]
之后,基于电压控制指令值v
ref
,控制转向辅助马达20,减速齿轮3进行工作,其结果是,电动助力转向装置进行工作以成为规定的转向角。
[0143]
以上,根据本实施方式,考虑驾驶辅助功能,能够以简单的结构高效地抑制振动。特别是,能够抑制随着adas功能等的工作而使由一般辅助控制部实现的用于振动抑制的信号成分减少的情况。由此,无论驾驶辅助功能的工作状态如何,都能够抑制因干扰等引起的振动,能够维持驾驶员的操作性。另外,由于基于转向转矩的辅助指令值被降低,因此能够抑制对基于adas功能等的控制的影响。而且,由于能够适当地抑制振动,因此能够高精度地执行在adas功能等中使用的手部握住/手部离开的检测。
[0144]
《第二实施方式》
[0145]
在第一实施方式中,对以通过增益分配部310对一般辅助控制部200和驾驶辅助功能控制部300分配增益的结构为前提的实施方式进行了说明。在本实施方式中,对设想使用了不灵敏区设定部320来代替增益分配部310的结构的实施方式进行说明。另外,省略与第一实施方式重复的部位的说明,着眼于差别进行说明。
[0146]
[功能结构]
[0147]
图8是表示本实施方式所涉及的电动助力转向装置的功能结构的一例的框图。作为与第一实施方式所示的图5的差异,一般辅助控制部200具备信号转换部230来代替增益设定部202。另外,驾驶辅助功能控制部300省略了增益设定部305。另外,设置有用于控制信号转换部230的参数(不灵敏区)的不灵敏区设定部320。另外,在图8中,不灵敏区设定部320包含于驾驶辅助功能控制部300,但也可以设置于驾驶辅助功能控制部300的外部。
[0148]
信号转换部230对从减法器214输入的指令值进行转换,并向加法器215输出。图9a和图9b是表示在信号转换部230中使用的转换表的例子的图。在图9a和图9b中,横轴表示输入,纵轴表示输出。图9a表示adas功能未工作的情况下的转换表的例子。图9b表示adas功能正在工作的情况下的转换表的例子。在本实施方式中,在adas功能正在工作的情况下,如图9b所示,对输入设定输出为0的不灵敏区b。在图9a的例子中,不灵敏区b的宽度为0,在图9b
的例子中,不灵敏区b的宽度被设定为大于0。不灵敏区b的宽度没有特别限定,可以使用根据正在工作的adas功能的种类而规定的比例,也可以与adas功能的种类无关地使用恒定的比例。另外,在此,示出了设定了不灵敏区的转换表的例子,但也可以使用定义了相当于不灵敏区的转换条件的转换式等其他转换方法。
[0149]
不灵敏区设定部320根据adas功能是否工作,进行一般辅助控制部200的信号转换部230中的不灵敏区b的设定。
[0150]
[处理流程]
[0151]
图10是本实施方式的基于eps-ecu 30的处理的流程图。如上所述,本处理流程例如通过由eps-ecu 30所具备的cpu(未图示)读取并执行存储于存储装置(未图示)的程序来实现。
[0152]
在s1001中,eps-ecu 30判定adas功能是否正在工作。此处的成为判定对象的adas功能可以以与电动助力转向装置的控制相关联的adas功能为对象判定是否正在工作,也可以以整体adas功能为对象判定是否正在工作。在adas功能正在工作的情况下(在s1001中为“是”),eps-ecu 30的处理进入s1002。另一方面,在adas功能未工作的情况下(在s1001中为“否”),eps-ecu 30的处理进入s1003。
[0153]
在s1002中,eps-ecu 30通过不灵敏区设定部320设定一般辅助控制部200的信号转换部230的不灵敏区b。在本实施方式中,如图9b所示,设定规定宽度的不灵敏区b。这里,在不设定不灵敏区b的情况下,使用图9a所示的转换表。之后,eps-ecu 30的处理进入s1003。
[0154]
在s1003中,eps-ecu 30从各种传感器获取转向转矩t
dct
和车速vh。
[0155]
在s1004中,eps-ecu 30基于在s1003中获取的转向转矩t
dct
和车速vh,通过一般辅助控制部200导出辅助指令值。这里的导出方法与在第一实施方式中使用图3和图4说明的方法相同。
[0156]
在s1005中,eps-ecu 30针对在s1004中导出的辅助指令值,通过滤波处理部211进行滤波处理。如第一实施方式所述,滤波处理可以使用hpf,也可以使用bpf。在此得到的指令值相当于由辅助指令值运算部201赋予的用于振动抑制的指令值。
[0157]
在s1006中,eps-ecu 30从在s1004中得到的辅助指令值中减去在s1005中得到的指令值。本工序对应于图8所示的减法器214的工作。
[0158]
在步骤s1007中,eps-ecu 30通过信号转换单元230对在s1006中得到的指令值进行信号转换处理。在此,信号转换部230使用图9a或图9b所例示的转换表,对所输入的信号进行转换。
[0159]
在s1008中,eps-ecu 30对在s1007中进行了信号转换处理的指令值加上在s1005中得到的指令值。本工序对应于图8所示的加法器215的工作。
[0160]
在步骤s1009中,eps-ecu 30将在s1008中获得的辅助指令值向加法器400输出。此时,在adas功能正在工作的情况下,加法器400将从驾驶辅助功能控制部300输出的指令值与在s1008中得到的辅助指令值相加,并向电压控制部500输出。另一方面,在adas功能未工作的情况下,由于不从驾驶辅助功能控制部300侧输出指令值,因此加法器400将在s1008中得到的辅助指令值直接向电压控制部500输出。然后,电压控制部500基于输入的指令值,输出用于控制转向辅助马达20的电压控制指令值v
ref
。然后,结束本处理流程。
[0161]
之后,基于电压控制指令值v
ref
,控制转向辅助马达20,减速齿轮3进行工作,其结果是,电动助力转向装置进行工作以成为规定的转向角。
[0162]
以上,通过本实施方式,与第一实施方式同样地,考虑驾驶辅助功能,能够以简易的结构高效地抑制振动。特别是,能够抑制随着adas功能等的工作而使由一般辅助控制部进行的用于振动抑制的信号成分减少的情况。由此,无论驾驶辅助功能的工作状态如何,都能够抑制因干扰等引起的振动,能够维持驾驶员的操作性。另外,由于基于转向转矩的辅助指令值被降低,因此能够抑制对基于adas功能等的控制的影响。而且,由于能够适当地抑制振动,因此能够高精度地执行在adas功能等中使用的手部握住/手部离开的检测。
[0163]
《其他实施方式》
[0164]
另外,电动助力转向装置的结构并不限定于图1所示的结构。例如,电动助力转向装置也可以由方向盘1侧和小齿轮齿条机构5侧机械地分离的线控转向(sbw:steer-by-wire)机构构成。
[0165]
另外,在本发明中,也能够通过使用网络或者存储介质等将用于实现上述一个以上实施方式的功能的程序、应用提供给系统或者装置,该系统或者装置的计算机中的一个以上处理器读取并执行程序的处理也可以实现本发明。
[0166]
这样,本发明并不限定于上述实施方式,将实施方式的各结构相互组合、本领域技术人员基于说明书的记载以及公知的技术进行变更、应用也是本发明的预定的范围,包含在要求保护的范围内。
[0167]
如上所述,在本说明书中公开有如下的事项。
[0168]
(1)一种电动助力转向装置的控制装置,其中,
[0169]
电动助力转向装置的控制装置(例如,30)具备:
[0170]
第一控制部(例如,200),所述第一控制部基于对所述电动助力转向装置的转向轴施加的转向转矩来导出第一指令值;
[0171]
第二控制部(例如,300),所述第二控制部基于针对驾驶辅助功能的目标指令值,导出第二指令值;以及
[0172]
合成部(例如,400),所述合成部对所述第一指令值和所述第二指令值进行合成,生成所述电动助力转向装置的指令值,
[0173]
所述第一控制部具有:
[0174]
导出部(例如,201),所述导出部由所述转向转矩导出包含振动抑制成分的指令值;
[0175]
提取部(例如,211),所述提取部从由所述导出部导出的指令值中提取与所述振动抑制成分对应的指令值;
[0176]
调整部(例如,202),所述调整部根据所述第二控制部的功能的工作状态,对由所述导出部导出的指令值进行调整;以及
[0177]
加法部(例如,215),所述加法部通过将由所述调整部调整后的指令值与由所述提取部提取出的指令值相加来生成所述第一指令值。
[0178]
根据该结构,能够考虑到驾驶辅助功能而以简易的结构高效地抑制振动。特别是,能够抑制随着adas功能等的工作而使由一般辅助控制部实现的用于振动抑制的信号成分减少的情况。由此,无论驾驶辅助功能的工作状态如何,都能够抑制因干扰等引起的振动,
能够维持驾驶员的操作性。另外,由于基于转向转矩的辅助指令值被降低,因此能够抑制对基于adas功能等的控制的影响。另外,根据该结构,无需在第二控制部增加用于振动抑制的功能。因此,能够节约用于执行追增加功能的资源(执行时间、存储区域)。
[0179]
(2)根据(1)所述的电动助力转向装置的控制装置,其特征在于,
[0180]
所述第一控制部还具有减法部(例如,214),所述减法部从由所述导出部导出的指令值中减去由所述提取部提取出的指令值,
[0181]
所述调整部对由所述减法部进行减法运算后的指令值进行调整。
[0182]
根据该结构,能够更高精度地使振动抑制成分反映在电动助力转向装置的指令值中。
[0183]
(3)根据(1)或(2)所述的电动助力转向装置的控制装置,其特征在于,
[0184]
在所述第二控制部的功能正在工作的情况下,所述调整部基于所述第一指令值与所述第二指令值的规定的混合比率,调整由所述导出部导出的指令值。
[0185]
根据该结构,能够进行与驾驶辅助功能的工作状态相应的各指令值的调整。
[0186]
(4)根据(3)所述的电动助力转向装置的控制装置,其特征在于,
[0187]
所述第二控制部进行基于adas(advanced driver-assistance systems,先进的驾驶辅助系统)功能的所述电动助力转向装置的控制,
[0188]
所述调整部中的所述规定的混合比率根据正在工作的所述adas功能的种类来规定。
[0189]
根据该结构,能够根据adas功能的工作内容来调整各指令值。
[0190]
(5)根据(1)或(2)所述的电动助力转向装置的控制装置,其特征在于,
[0191]
在所述第二控制部的功能正在工作的情况下,所述调整部使用定义了规定范围的不灵敏区的转换条件,调整由所述导出部导出的指令值。
[0192]
根据该结构,能够进行与驾驶辅助功能的工作状态相应的各指令值的调整。
[0193]
(6)根据(5)所述的电动助力转向装置的控制装置,其特征在于,
[0194]
所述第二控制部进行基于adas(advanced driver-assistance systems)功能的所述电动助力转向装置的控制,
[0195]
所述调整部中的所述不灵敏区根据正在工作的所述adas功能的种类来规定所述规定的范围。
[0196]
根据该结构,能够根据adas功能的工作内容来调整各指令值。
[0197]
(7)根据(1)至(6)中任一项所述的电动助力转向装置的控制装置,其特征在于,
[0198]
所述提取部使用高通滤波器来提取规定的频率成分的指令值。
[0199]
根据该结构,能够使用高通滤波器来提取振动抑制成分。
[0200]
(8)根据(7)所述的电动助力转向装置的控制装置,其特征在于,
[0201]
所述高通滤波器的截止频率被设定在8~15hz的范围内。
[0202]
根据该结构,能够使用电动助力转向装置的固有频率即8~15hz的范围来提取振动抑制成分。
[0203]
(9)根据(1)至(6)中任一项所述的电动助力转向装置的控制装置,其特征在于,
[0204]
所述提取部使用带通滤波器来提取规定的频率成分的指令值。
[0205]
根据该结构,能够使用带通滤波器来提取振动抑制成分。
[0206]
(10)根据(9)所述的电动助力转向装置的控制装置,其特征在于,
[0207]
所述带通滤波器的通带被设定在8~15hz的范围内。
[0208]
根据该结构,能够使用电动助力转向装置的固有频率即8~15hz的范围来提取振动抑制成分。
[0209]
(11)根据(1)至(10)中任一项所述的电动助力转向装置的控制装置,其特征在于,
[0210]
针对所述驾驶辅助功能的目标指令值是目标转向角或目标辅助转矩。
[0211]
根据该结构,能够与使用目标转向角或者目标辅助转矩作为目标指令值的驾驶辅助功能相对应地抑制用于振动抑制的信号成分减少。
[0212]
(12)一种电动助力转向装置的控制方法,其中,
[0213]
所述电动助力转向装置的控制方法包括:
[0214]
第一导出工序,基于对所述电动助力转向装置的转向轴施加的转向转矩,导出第一指令值(例如,s704~s709);
[0215]
第二导出工序,基于针对驾驶辅助功能的目标指令值,导出第二指令值(例如,300);以及
[0216]
合成工序,合成所述第一指令值和所述第二指令值,生成所述电动助力转向装置的指令值(例如,s710),
[0217]
在所述第一导出工序中,
[0218]
由所述转向转矩导出包含振动抑制成分的指令值(例如,s705),
[0219]
从所述被导出的指令值中提取与所述振动抑制成分对应的指令值(例如,s706),
[0220]
根据所述第二导出工序的工作状态,调整所述被导出的指令值(例如,s708),
[0221]
通过对所述被调整后的指令值加上所述提取出的指令值从而生成所述第一指令值(例如,s709)。
[0222]
根据该结构,能够考虑到驾驶辅助功能而以简易的结构高效地抑制振动。特别是,能够抑制随着adas功能等的工作而使由一般辅助控制部进行的用于振动抑制的信号成分减少的情况。由此,无论驾驶辅助功能的工作状态如何,都能够抑制因干扰等引起的振动,能够维持驾驶员的操作性。另外,由于基于转向转矩的辅助指令值被降低,因此能够抑制对基于adas功能等的控制的影响。
[0223]
以上,参照附图对各种实施方式进行了说明,但本发明当然并不限定于该例子。只要是本领域技术人员,就能够在权利要求书所记载的范畴内想到各种变更例或修正例,这些当然也属于本发明的技术范围。另外,在不脱离发明的主旨的范围内,也可以任意地组合上述实施方式中的各构成要素。例如,也可以将进行不灵敏区处理的信号转换部230和增益设定部202组合而构成,作为对包含从转向转矩导出的振动抑制成分的指令值进行调整的调整部。
[0224]
另外,本技术基于2020年12月23日申请的日本专利申请(日本特愿2020-213947),其内容作为参照引用于本技术中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1