一种能够自主爬行的软体机器人及其腿部执行件
1.本发明涉及爬行机器人技术领域,具体涉及一种能够自主爬行的软体机器人及其腿部执行件。
背景技术:
2.在针对于自然灾害的防范以及在灾区中对受困者进行及时搜救、抢救,已成为了目前我国在针对自然灾害中,首先要进行的工作之一。
3.针对于上述情况,目前本领域采用多种技术手段进行应对,其中人力搜寻、搜救犬搜寻以及无人机勘察皆为目前主要技术手段,在此基础上,随着科技的不断发展,具有爬行功能的软体机器人,则逐渐替代了上述传统的技术手段,成为了灾害防范及应急救援的主要技术手段。
4.软体机器人在面对复杂救援环境时,显著减少了我国自然灾害所造成的人员伤亡和财产损失,且相对于人力搜寻等传统方法,也极大限度的降低了人力与物力的输出,然而随着软体机器人使用频率的不断增高,传统的软体机器人已逐渐无法满足目前本领域的高标准使用需求,现将传统软体机器人所存在的弊端进行如下具体说明:1、传统的软体机器人其在面对复杂的山区环境时,其移动性能的弊端逐渐显现出来,由于传统软体机器人的结构过于单一,行走方式也较为传统,其在平原地区尚可自由行动,然针对于山区环境中,传统的软体机器人并不具备一定的攀爬能力,从而在此基础上,极大限度的限制了软体机器人在山区环境中的使用可行性;针对于该技术问题,目前本领域已有部分相关现有技术,对此予以披露,例如:“一种多模块差动软体机器人”(cn201811514935.6),以下简称对比文件1,该对比文件1具体公开“本发明的多模块差动软体机器人,解决了软体机器人模块化和差动运动,其具有模块化和差动运动的优点,能进行直行和转弯运动,能适用于多种环境;差动运动模块结构简单,其可以将转动运动序列和直线运动序列结合起来并交替进行,实现连续运动过程中的转向,进而提高机器人的运动速度”。该对比文件1的技术方案虽在一定程度上提高了传统软体机器人的运动能力和灵活性,然而该对比文件1的软体机器人在山区运动时,其依然无法具备足够的攀爬能力,以应对山区作业的需要,且对比文件1“通过设置有中间模块,中间模块的数量可以进行不同的组合,形成不同长度的模块化差动软体机器人,在运动能力和灵活性上有很大提高”,然此技术方案在应对于山区作业时,明显缺乏可实施性,接连不断且长度过长的机器人,如何能够在崎岖、蜿蜒的山路中有效行进(障碍物过多)。
5.2、传统的软体机器人需通过多个启动模块,以对不同的行走模块进行启动,此为一对一工作模式(一个启动模块对应一个行走模块),若如此,在针对于抢险救灾过程中的软体机器人,则其体积必然过大,且质量过重,必然导致所需耗能增加,不利于软体机器人于特殊环境下长时间工作,且启动模块和行走模块的增加,其线路传输连接的管线必然增加,此点增加了软体机器人在使用过程中的风险性(不可控因素对管线造成碰撞),且当传统的软体机器人体积增大时,其在抢险救灾时,则无法根据环境需要,深入至不同的坑洞当
中进行抢险作业;例如,在对比文件1中气囊驱动器所需气源,则需不同数量且安装位置不同的气泵进行搭配设置,针对于该技术问题,目前本领域未有合适的技术方案对此予以解决。
6.由此可见,设计出一种全新的软体机器人以解决上述问题,对于目前本领域来说是迫切需要的。
技术实现要素:
7.有鉴于此,本发明的目的在于提供一种能够自主爬行的软体机器人及其腿部执行件,以解决现有技术传统的软体机器人,不具备攀爬能力,不便于在山区中作业的问题,更进一步的解决了,一个传统软体机器人需多个启动模块对不同的行走模块进行启动的问题。
8.本发明通过以下两个技术方案实现:本发明之一:一种能够自主爬行的软体机器人,包括支撑部,所述支撑部上配置有至少两个腿部执行件,所述支撑部上设置有用于启动至少两个腿部执行件工作的启动组件,所述支撑部上配置有用于驱动腿部执行件升降及水平旋转的驱动组件。
9.进一步,所述支撑部为正六边形结构,腿部执行件设置有六个,且分别分布于支撑部的端角;所述腿部执行件包括硅胶套,所述硅胶套为顶部敞口的中空结构,且其内部通过隔板分隔成两个独立空腔;所述驱动组件设置有六个,并与所述腿部执行件相适配,所述驱动组件包括升降舵机,且该升降舵机的安装端固定于支撑部上,所述升降舵机的活塞杆伸缩端设置有第一衔接件,所述驱动组件还包括安装于第一衔接件上的旋转舵机,且该旋转舵机的旋转输出端设置有第二衔接件,且该第二衔接件的端部设置有用于对硅胶套顶部敞口进行封盖的盖体。
10.进一步,所述硅胶套高度方向的两侧皆设置有锯齿状的缺口;所述支撑部以中心线划分为两个对称分部,所述腿部执行件每三个为一组,分别安装于两个对称分部上,构成第一腿部支撑组和第二腿部支撑组;所述启动组件包括气泵以及四通电磁阀;所述气泵的安装端固定于支撑部的顶部,所述气泵的出气端与四通电磁阀的进气端相通,所述四通电磁阀具有四个出气口,分别为第一出气口、第二出气口、第三出气口及第四出气口;第一出气口与第一腿部支撑组上的硅胶套的一个独立空腔相连通;第二出气口与第一腿部支撑组上的硅胶套的另一个独立空腔相连通;第三出气口与第二腿部支撑组上的硅胶套的一个独立空腔相连通;第四出气口与第二腿部支撑组上的硅胶套的另一个独立空腔相连通;该启动组件还包括安装于气泵外侧,并与所述硅胶套相适配的六个两位两通电磁阀,两位两通电磁阀的进气口分别与硅胶套内部的两个独立空腔相连通。
11.进一步,所述支撑部上设置有电源模块和单片机。
12.进一步,所述支撑部上设置有继电器,所述单片机的信息输出端与继电器的信息输入端相接,且继电器的信息输出端与四通电磁阀及两位两通电磁阀的信息输入端相接。
13.进一步,所述支撑部的顶部安装有云台,云台的安装基座端与支撑部固定连接;所述云台的旋转端上安装有视频采集模块、人体红外感应模块、超声波感应模块、红外激光模块和照明件;所述支撑部的顶部设置有wifi信息传输模块;所述视频采集模块、人体红外感应模块、超声波感应模块、红外激光模块的信息输出端分别与单片机的信息输入端相接,所述单片机的信息输出端与wifi信息传输模块的输入端相接;所述wifi信息传输模块的信息输出端与单片机的信息输入端相接。
14.进一步,所述支撑部上设置有gps模块,所述gps模块的信息输出端与单片机的信息输入端相接。
15.进一步,所述支撑部的顶部设置有气体传感器模块、声音检测模块、三维角度传感模块和温湿度传感器模块;所述气体传感器模块、声音检测模块、三维角度传感模块和温湿度传感器模块的信息输出端与单片机的信息输入端相接。
16.进一步,所述云台的旋转端面上还安装有用于对视频采集模块进行散热的散热扇。
17.本发明之二:一种能够自主爬行的软体机器人的腿部执行件,所述腿部执行件包括硅胶套,所述硅胶套为顶部敞口的中空结构,所述硅胶套的内部设置有隔板,其用于将硅胶套的内部分隔为两个独立空腔;所述硅胶套高度方向的两侧皆设置有锯齿状的缺口。
18.本发明的有益效果在于:该能够自主爬行的软体机器人及其腿部执行件,通过支撑部、腿部执行件、启动组件和驱动组件的配合使用,当本装置在使用时,首先通过启动组件可直接启动至少两个腿部执行件,随后在驱动组件的作用下,使得腿部执行件完成升降及水平旋转的工作,从而使得本装置进行移动及攀爬,本技术技术方案通过连贯而又紧凑的结构,解决了传统的软体机器人不具备攀爬能力的问题,且通过启动组件对至少两个腿部执行件直接完成启动,可摆脱传统的软体机器人需多个启动模块对不同的行走模块进行启动的使用方法,提高了本装置的便捷性,降低了生产加工成本,缩短了加工过程,此外在减小本装置体积的基础上,提高了本装置在抢险救灾过程中的适应性。
19.本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
20.附图说明
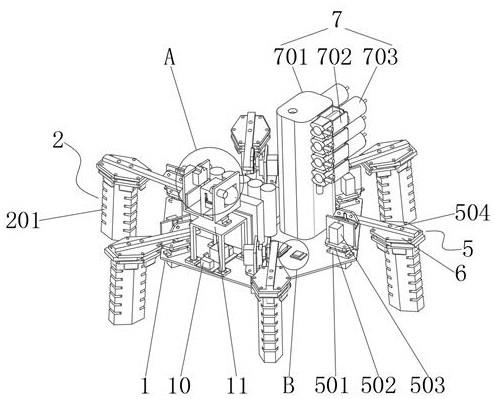
21.图1为本发明的立体示意图i;图2为本发明图1中a的局部放大图;图3为本发明图1中b的局部放大图;图4为本发明的立体示意图ii;图5为本发明图4中c的局部放大图;图6为本发明的立体示意图iii;图7为本发明的硅胶套及驱动组件局部立体示意图i;图8为本发明的硅胶套及驱动组件局部立体示意图ii;图9为本发明的硅胶套局部立体示意图;图10为本发明的软管示意图;图11为硅胶套注气攀爬时的状态示意图。
22.图中:1、支撑部;2、腿部执行件;201、硅胶套;3、独立空腔;4、隔板;5、驱动组件;501、升降舵机;502、第一衔接件;503、旋转舵机;504、第二衔接件;6、盖体;7、启动组件;701、气泵;702、四通电磁阀;703、两位两通电磁阀;8、电源模块;9、单片机;10、继电器;11、云台;12、视频采集模块;13、人体红外感应模块;14、超声波感应模块;15、红外激光模块;16、wifi信息传输模块;17、gps模块;18、气体传感器模块;19、声音检测模块;20、三维角度传感模块;21、温湿度传感器模块;22、缺口。
具体实施方式
23.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
24.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
26.在本发明的上述描述中,需要说明的是,术语“一侧”、“另一侧”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
27.此外,术语“相同”等术语并不表示要求部件绝对相同,而是可以存在微小的差异。术语“垂直”仅仅是指部件之间的位置关系相对“平行”而言更加垂直,并不是表示该结构一
定要完全垂直,而是可以稍微倾斜。
28.本发明之一:请参阅图1-11,本发明提供一种技术方案:一种能够自主爬行的软体机器人,包括支撑部1,支撑部1上配置有至少两个腿部执行件2,支撑部1上设置有用于启动至少两个腿部执行件2工作的启动组件7,支撑部1上配置有用于驱动腿部执行件2升降及水平旋转的驱动组件5;本装置在使用时,可通过启动组件,同时启动至少两个腿部执行件,使其开始工作,随后在驱动组件的作用下,使得腿部执行件升降或水平转动,当两个不同的腿部执行件产生位置差或高度差时,则可达到攀爬和水平移动的目的。
29.本实施例中:支撑部1为正六边形结构,腿部执行件2设置有六个,且分别分布于支撑部1的端角;腿部执行件2包括硅胶套201,硅胶套201为顶部敞口的中空结构,且其内部通过隔板4分隔成两个独立空腔3;驱动组件5设置有六个,并与腿部执行件2相适配,驱动组件5包括升降舵机501,且该升降舵机501的安装端固定于支撑部1上,升降舵机501的活塞杆伸缩端设置有第一衔接件502,驱动组件5还包括安装于第一衔接件502上的旋转舵机503,且该旋转舵机503的旋转输出端设置有第二衔接件504,且该第二衔接件504的端部设置有用于对硅胶套201顶部敞口进行封盖的盖体6;硅胶套201高度方向的两侧皆设置有锯齿状的缺口22;支撑部1以中心线划分为两个对称分部,腿部执行件2每三个为一组,分别安装于两个对称分部上,构成第一腿部支撑组和第二腿部支撑组;启动组件7包括气泵701以及四通电磁阀702,本技术技术方案具有便于整体携带的优点,气泵也随本装置一并便于携带,而在具体操作过程中,气泵和机器人是一并运动的;气泵701的安装端固定于支撑部1的顶部,气泵701的出气端与四通电磁阀702的进气端相通,四通电磁阀702具有四个出气口,分别为第一出气口、第二出气口、第三出气口及第四出气口;第一出气口与第一腿部支撑组上的硅胶套201的一个独立空腔3相连通;第二出气口与第一腿部支撑组上的硅胶套201的另一个独立空腔3相连通;第三出气口与第二腿部支撑组上的硅胶套201的一个独立空腔3相连通;第四出气口与第二腿部支撑组上的硅胶套201的另一个独立空腔3相连通;该启动组件7还包括安装于气泵701外侧,并与硅胶套201相适配的六个两位两通电磁阀703,两位两通电磁阀703的进气口分别与硅胶套201内部的两个独立空腔3相连通;此处进一步限定支撑部的结构及腿部执行件的数量及安装位置,当需使用本装置时,气泵可先行工作,经由四通电磁阀对硅胶体内部空腔进行注气,使得硅胶体能够呈站立状,一定程度上增强本装置的稳定性,而本技术所提及的气泵与四通电磁阀及硅胶体之间的连接关系,可采用市场上常用的软管,软管将气泵的输出端与四通电磁阀的输入端相连通,再通过软管将四通电磁阀的出气口与硅胶套相通,此处需要强调的是,四通电磁阀上的一个出气口对应三个独立空腔,此处则可使用分支软管(此处可参考附图10),将分支软管
的入口端与四通电磁阀上的出气口相连通,再将分支软管上的三个出口端分支分别与不同的独立空腔相通,至于软管的连接方式,此为本领域技术人员应当掌握的现有技术,故本技术对此不再重复赘述;支撑部1上设置有电源模块8和单片机9,电源模块对本装置的电气元件进行供电;当本装置需水平移动时,单片机的信息输出端与旋转舵机的信息输入端相接,单片机发出指示命令,使得六个旋转舵机,根据需要水平调节,使得本装置不同的硅胶套之间出现位置差,从而达到水平移动的目的;当本装置需攀爬时,单片机的信息输出端与升降舵机的信息输入端相接,单片机发出指示命令,此时旋转舵机继续工作,驱使本装置靠近于待攀爬地点,此时两组不同的腿部支撑组的升降舵机接收到来自单片机的不同指示命令,其中一个腿部支撑组的升降舵机升至较高点,而另一组腿部支撑组的升降舵机下降至较低点,并反复此操作,直至本装置完成对待攀爬点的攀爬(此动作类似于蜘蛛的行动方式);此处根据需要,气泵选择性的经由四通电磁阀对不同的硅胶套进行注气,当本装置在攀爬时,可选择性的对靠近于待攀爬点的一个腿部支撑组的硅胶套进行注气(此时注气的是硅胶套临近于待攀爬点的独立空腔,此时该腿部支撑组的硅胶套呈现出向待攀爬点“迈步”的姿态),再对远离待攀爬点的另一个腿部支撑组的硅胶套进行注气(此时注气的是硅胶套朝向于本装置内侧的独立空腔,此时该组硅胶套呈现出腿部向内收缩的姿态),由此便于本装置完成攀爬工作,此处参考附图11;而此时两位两通电磁阀,也通过软管与硅胶套内部的独立空腔相连通,此处还可根据需要对独立空腔内部气体进行放气,从而在注气与放气的交替工作中,使得硅胶套在攀爬时,能够及时调整硅胶套的姿态(硅胶套不同的独立空腔注气时,其必然发生形变倾斜,以应对不同的地理环境)。
30.本技术技术方案通过设置有六个腿部执行件,其目的是在本装置攀爬时,每次必然有三个腿部执行件成为本装置的支撑受力点,以提高本装置的稳定性,且进一步的将硅胶套设计为两个独立空腔,并在其身部设置有锯齿状的缺口,其目的是在对不同腔体进行注气时,其硅胶套整体具有倾斜向内或向外微调的条件,以保证本装置的稳定性;且本技术技术方案通过一个气泵及相关气路的连接布局,则可与现有技术的软体机器人相区别,其需通过气泵对不同的腿部进行注气支撑,此明显需耗费过多的人力、物力、财力,且无法达到便捷性,不利于在特殊环境下(自然灾害)进行抢险救灾;而至于本装置如何在水平方向上移动,此为旋转舵机工作状态下,不同的硅胶套之间产生位置差,且在升降舵机的配合下及硅胶套进行注气后,便可达到的工作状态,此类似于蜘蛛的爬行状态;至于四通电磁阀与气泵及硅胶体的软管连接,附图未示出,同时两位两通电磁阀与软管连接,以及该软管与相应的独立空腔的连接,附图也未示出,此连接方式,为本领域现有技术,故本技术对此不再重复赘述;本技术技术方案还可根据需要,设置八个腿部执行件,并相对应的增加气泵对硅胶套的气流传输管道,以此类推,可以偶数为单位增加腿部执行件,此举是根据需要,选择性的扩大本装置的规格,以应对不同的工作环境需要,或以奇数为单位增加腿部执行件,然腿部执行件需均匀分布于支撑部上。
31.本实施例中:支撑部1的顶部安装有云台11,云台11的安装基座端与支撑部1固定连接;云台11的旋转端上安装有视频采集模块12、人体红外感应模块13、超声波感应模块14、红外激光模块15和照明件;视频采集模块是通过头部摄像头对前方画面进行实时拍摄,并以视频信号的形式通过图传模块传输到电脑的上位机程序里显示出当前的画面,此是先将视频信息发送至单片机,再有单片机处理经由wifi传输模块转发至终端,而此时云台可为头部摄像头提供转动力,以便于将更多、更详细的视频信息传输至终端;人体红外感应模块则是人进入其感应范围时输出高电平,通过云台的扫描,精确地探测前方是否有被困人员的存在,同时单片机处理后将该信号通过wifi模块发送到上位机程序;超声波感应模块则是对前方物体发出超声波反弹,数据反馈后单片机对该过程计时能够估算出大致的距离,单片机将处理后的简单距离数据通过wifi模块发送到电脑上位机程序,配合云台探测出周围扇形180度范围的障碍物,根据距离由上位机程序通过wifi模块发送动作数据操作本装置移动和不断的左右扫描,得到距离数据在上位机程序中可以绘制出周围环境的大致图形,配合绘制出的行进路线,呈现出大致的环境二维平面地形图;而此处所提及的红外激光模块和照明件,则是配合上位机程序通过wifi模块发送指令控制头部红外激光头(红外激光模块)和大功率led灯珠(照明件)对画面内容进行辅助定位和补光,得到更为清楚的视频画面来对周围环境进行观察;支撑部1的顶部设置有wifi信息传输模块16;视频采集模块12、人体红外感应模块13、超声波感应模块14、红外激光模块15的信息输出端分别与单片机9的信息输入端相接,单片机9的信息输出端与wifi信息传输模块16的输入端相接;wifi信息传输模块16的信息输出端与单片机9的信息输入端相接;本实施例其目的是对周围环境进行精准勘测且及时反馈,并由终端进行判定,指示本装置的进一步的动作,且通过人体红外感应模块可搜寻附近的被困人员,而超声波感应模块等结构,其目的是避免本装置与周围障碍物发生碰撞。
32.本实施例中:支撑部1上设置有继电器10,单片机9的信息输出端与继电器10的信息输入端相接,且继电器10的信息输出端与四通电磁阀702及两位两通电磁阀703的信息输入端相接,由继电器控制通断使得磁芯产生磁力推动四通电磁阀的电磁阀主阀芯的动作来控制硅胶套进气。
33.本实施例中:支撑部1上设置有gps模块17,gps模块17的信息输出端与单片机9的信息输入端相接,由环境所在卫星定位成功后返回精确经纬度数据到单片机处理后经过wifi模块发送到电脑上位机程序,从而了解机器人目前所处位置,同时返回的数据可以在上位机程序中绘制出大致的行进路线,从而确定救援位置。
34.本实施例中:支撑部1的顶部设置有气体传感器模块18、声音检测模块19、三维角度传感模块20和温湿度传感器模块21;气体传感器模块18、声音检测模块19、三维角度传感模块20和温湿度传感器模块21的信息输出端与单片机9的信息输入端相接;
气体传感器模块具有完全校准的空气质量输出信号,能够感知空气中有害气体,如甲醛和二氧化碳的浓度,通过连接单片机将空气数据经过esp-01 wifi串口模块发送到电脑端的基于labview编写的上位机程序,可以根据机器人所在环境空气情况安排实施救援;声音检测模块,是对环境声波进行检测,并将数据传输到单片机处理后经过wifi模块发送到电脑上位机程序,从而了解机器人目前所处位置环境状况;三维角度传感模块内有mpu-6050传感器,可以检测出加速度和角速度数据,由单片机处理后通过wifi模块发送到上位机程序,机器人目前所处的姿势状态和运动倾向,从而据此安排机器人的行进和对环境的复杂程度做一定程度的估计;温湿度传感器模块是应用专用的数字模块采集技术和温湿度传感技术,将温度量和湿度量转换成容易被测量处理的电信号检测出环境的温度和湿度,通过连接单片机将空气数据经过esp-01wifi串口模块发送到电脑端的基于labview编写的上位机程序,可以根据机器人所在环境空气情况安排实施救援;本实施例其目的是对本装置周围环境进行预先勘测,以便于对被困者进行施救,且在施救过程中,也可对救援者进行保护(已提前对周围环境进行勘测,可提前预防);本实施例其志在提高在对被困者搜救过程中的安全性。
35.本实施例中:云台11的旋转端面上还安装有用于对视频采集模块12进行散热的散热扇,本实施例通过散热扇,可提高视频采集模块长时间工作的安全性,避免其使用时间过久发热而出现损坏。
36.本发明之二:参阅图9,腿部执行件2包括硅胶套201,硅胶套201为顶部敞口的中空结构,硅胶套201的内部设置有隔板4,其用于将硅胶套201的内部分隔为两个独立空腔3;硅胶套201高度方向的两侧皆设置有锯齿状的缺口22;此处将硅胶套的内部设计为两个独立空腔,且其身部设置有缺口,其目的是在利用外界注气模块对硅胶套内部进行注气时,可选择性的对某个独立空腔进行注气,此时硅胶套便可发生形变(一个独立空腔内注气,另一个不住气,注气的独立空腔必然向外膨胀,并压缩未注气的独立空腔,从而达到硅胶套形变,以便于应对不同的自然环境,此处的缺口,其目的是为硅胶套形变而提供缓冲空间)。
37.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1