一种四轮独立转向的水田农业机器人及其导航方法与流程
1.本发明涉及农业机器人技术领域,具体涉及一种四轮独立转向的水田农业机器人及其导航方法。
背景技术:
2.农业的发展离不开机械化,大力发展现代农业,优化农机装备结构,是提高农业劳动生产率的重要措施。在南方,水稻为主要粮食作物。南方的水田地势西高东低,山区面积较多。大多数农业机器人是在原有农业机械设备上加装自动导航系统,适用于水田行走的小型智能机器人相对较少。
3.在现有技术中,插秧和收获已经初步实现了机械化,但在水稻田间管理环节中的机械化程度较低。主要因为大型植保机械难以适应水田地形,对机械操作员要求高,劳动强度大,作业期间在田间调头会造成大面积压苗,存在伤苗的问题。
技术实现要素:
4.本发明的目的在于克服上述存在的问题,提供一种四轮独立转向的水田农业机器人,该机器人不仅具有适合水田行走、灵活轻便、通过性强、智能化水平高的特点,而且在水田中行走或者调头时不会造成伤苗的问题发生。
5.本发明的另一目的在于提供一种四轮独立转向的水田农业机器人的导航方法。
6.本发明的目的通过以下技术方案实现:
7.一种四轮独立转向的水田农业机器人,包括行走底盘、用于控制所述行走底盘进行行走与转向的控制系统以及用于对行走底盘进行导航的导航系统;所述控制系统分别与所述行走底盘、所述导航系统连接;其中,
8.所述行走底盘包括用于安装作业机具的底盘架、设置在所述底盘架上的四个车轮以及设置在所述底盘架与每个所述车轮之间用于驱动车轮行走与转向的行走转向机构;其中,所述行走转向机构的上端与所述底盘架连接,下端与所述车轮连接;该行走转向机构包括基座、转向驱动机构以及行走驱动机构,其中,所述基座设置在所述底盘架与所述车轮之间,所述基座的上端与所述底盘架连接,下端与所述车轮连接;所述转向驱动机构用于驱动所述车轮进行360
°
转向;所述行走驱动机构用于驱动所述车轮进行行走。
9.上述水田农业机器人的工作原理是:
10.工作时,四个车轮分别通过行走转向机构进行独立驱动,通过转向驱动机构驱动车轮进行360
°
转向;由于每个车轮与底盘架均设有行走转向机构,因此,四个车轮可以实现独立转向,在水田作业时,可以实现全向平移和原地旋转,导航系统可以实现全局导航并规划路径,控制系统能够对行走底盘进行转向与行走的控制,搭载作业机具后,实现田间管理。
11.本发明的一个优选方案,其中,所述转向驱动机构包括转动设置在所述基座上的转向主动齿轮、固定设置在所述底盘架上的转向从动齿轮以及安装在所述基座上的转向驱
动电机;所述转向主动齿轮与所述转向从动齿轮相互啮合,所述转向驱动电机的驱动端与所述转向主动齿轮连接,其中,所述基座转动连接在所述底盘架上。采用上述结构,通过转向驱动电机驱动转向主动齿轮转动,由于转向从动齿轮固定在底盘架上,使得转向主动齿轮绕着转向从动齿轮旋转,从而带动基座进行转动,进而带动车轮实现360
°
转向。
12.优选地,行走驱动机构包括行走驱动电机、支撑臂、传动轴以及锥齿轮减速机,其中,所述支撑臂的上端固定设置在所述基座的下端,所述锥齿轮减速机安装在所述支撑臂的下端,所述行走驱动电机安装在基座的上端;所述支撑臂为中空结构,所述传动轴设置在所述支撑臂的内部;该传动轴的上端与所述行走驱动电机的驱动端连接,下端与所述锥齿轮减速机的输入端连接,所述车轮与所述锥齿轮减速机的输出端连接。通过设置行走驱动机构,行走驱动电机驱动传动轴转动,带动锥齿轮减速机转动,然后带动车轮转动,实现了车轮行走功能;通过设置支撑臂,且行走驱动电机安装在基座上,其目的在于,使得车轮周围的结构变得紧凑,减少车轮的转向范围,保证在转向时,行走驱动电机等结构损伤水稻,减少了伤苗问题的发生。
13.优选地,所述底盘架包括车架、设置在所述底盘架前后两端的前桥与后桥,所述基座转动连接在所述前桥、后桥上;其中,所述后桥与所述车架之间设有用于调节前桥与后桥之间距离的轴距调节机构;所述轴距调节机构包括用于引导所述后桥在车架上滑动的导向组件以及用于驱动所述后桥沿着车架进行滑动的轴距驱动组件。采用上述结构,轴距驱动组件可以驱动后桥在车架上滑动,从而调节前桥与后桥之间距离,进而调节位于前端车轮与后端车轮之间的轴距;通过实现轴距调节,可以根据水稻之间的行距对轴距进行适应性调节,从而避免车轮在原地转向时损伤水稻;另外,导向组件可以使后桥在车架上运动的更加稳定。
14.进一步地,所述轴距驱动组件为电动推杆,该电动推杆的一端与所述后桥连接,另一端与所述车架连接。通过电动推杆驱动自身的伸缩杆运动,从而可以带动后桥在车架上移动,实现轴距调节。
15.进一步地,所述导向组件包括两条平行设置在所述后桥上的导杆以及设置所述车架上且与所述导杆滑动配合的导向槽。通过导向槽与导杆的配合,在调节轴距的过程中,后桥在车架上运动的更加稳定。
16.优选地,所述前桥与所述车架通过弹性摆动机构连接,所述弹性摆动机构连接包括设置在所述前桥中部的铰接结构以及设置在所述前桥两端的减震器,所述前桥的中部通过所述铰接结构铰接在所述车架上,所述减震器的一端铰接在所述车架上,另一端铰接在所述前桥上。通过设置弹性摆动机构,可以实现前桥的左右摆动,可以使得行走底盘适应不平的路面,起到缓冲、减震的效果。
17.优先地,所述控制系统包括底层控制单元、终端执行节点、电机驱动器、远程遥控器以及接收机;所述远程遥控器与所述接收机连接,用于远程发送命令给接收机;所述接收机与所述底层控制单元连接,用于接收远程遥控器的命令;所述底层控制单元与所述电机驱动器连接,实现行走底盘的前进、后退以及转向;所述底层控制单元与所述终端执行节点连接;所述终端执行节点与所述作业机具连接,用于控制作业机具的启停。上述结构中,通过远程遥控器发送命令给接收机,接收机接收远程遥控器发送的命令,再将命令发送至底层控制单元,通过电机驱动器、终端执行节点分别控制行走底盘的前进、后退、转向以及作
业机具的启停,从而实现对机器人的远程遥控。
18.优选地,导航系统包括机载电脑、惯性测量单元、全球定位系统、视觉相机、无线通讯模块以及远程终端;其中,所述惯性测量单元、全球定位系统和视觉相机分别通过串口与所述机载电脑连接;所述远程终端通过所述无线通讯模块与所述机载电脑连接;该机载电脑与所述底层控制单元连接。通过设置上述机构,可以实现机器人的自动导航;全球定位系统和惯性测量单元为自动导航提供位置和姿态信息(即定位信息);视觉相机可实时获取苗带或杂草信息 (即视觉信息),可以避免行走底盘在作业过程中压苗;远程终端可以设置机器人的行走底盘参数与作业参数,并将参数设置信息通过无线通讯模块发送至机载电脑;机载电脑可以融合定位信息和视觉信息以及接受参数设置信息,并发送控制命令给底层控制单元,控制行走底盘按照设定的路径自动驾驶。
19.一种四轮独立转向的水田农业机器人的导航方法,包括以下步骤:
20.(1)对目标水田进行路径规划;
21.(2)导航系统获取当前的位置信息与姿态信息,并结合规划的路径生成命令,将命令发送至控制系统,控制系统控制行走底盘行驶的路径与规划的路径重合;其中,行走底盘在变换下一行路径进行作业的具体步骤为:
22.(2.1)四个车轮位于两纵行作物之间的中心线与两横行作物之间的中心线相交的位置上;其中,两纵行作物之间所形成的通道为纵向通道,两横行作物之间所形成的通道为横向通道,纵向通道与横向通道交错排列;两纵行作物之间的中心线为纵向通道的中心线,两横行作物之间的中心线为横向通道的中心线;此时,每个车轮所在的横向通道为换行初始横向通道;
23.(2.2)转向驱动机构同时驱动四个车轮原地转向,使得每个车轮指向下一横向通道上在靠近车轮旁的纵行上的两株作物之间的中点,行走驱动机构驱动每个车轮行走至对应的中点位置处,(即车轮位于横向通道的中心线上);
24.(2.3)转向驱动机构同时驱动四个车轮朝着相同方向原地转向,使得每个车轮指向的方向与横向通道的中心线重合,行走驱动机构驱动每个车轮行走,使得行走底盘平移至下一行路径上,此时,每个车轮位于纵行上的两株作物之间的中点;
25.(2.4)转向驱动机构同时驱动四个车轮朝着相同方向原地转向,使得每个车轮指向换行初始横向通道的中心线与下一纵向通道的中心线相交的位置上,行走驱动机构驱动每个车轮行走至该位置上;
26.(2.5)转向驱动机构同时驱动四个车轮朝着相同方向原地转向,使得每个车轮指向的方向与纵向通道的中心线重合。
27.优选地,步骤(1)中,对目标水田进行路径规划的具体步骤为:操作员手持远程终端,记录目标水田的边界点位置,机载电脑根据边界点位置信息自动生成目标水田的形状,再根据目标水田的形状规划出作业路径,并回传至远程终端以图形显示。
28.优选地,步骤(2)中,导航系统获取当前的位置信息和姿态信息,并结合规划的路径生成命令,将命令发送至控制系统,控制系统控制行走底盘行驶的路径与规划的路径重合的具体步骤为:全球定位系统获取当前的位置信息,惯性测量单元获取当前的姿态信息,并将位置信息与姿态信息发送至机载电脑,机载电脑根据位置信息、姿态信息以及规划的路径生成命令,将命令发送至底层控制单元,底层控制单元控制行走底盘的方向,使得行走
底盘行驶的路径与规划的路径重合。
29.优选地,在步骤(2.2)和(2.3)中,转向驱动机构驱动车轮的累计转向角度为90
°
,在步骤(2.4)和(2.5)中,转向驱动机构驱动车轮的累计转向角度也为90
°
。通过累计转向90
°
,使得在换下一行路径时,行走底盘可以横向平移至新一行路径继续作业,实现的精准的作业,同时也避免了伤秒。
30.优选地,在步骤(2.1)中,通过轴距调节机构调节前桥与后桥的距离,使得前桥上和车轮和后桥上的车轮均位于横向通道的中心线上。
31.本发明与现有技术相比具有以下有益效果:
32.1、本发明中的四轮独立转向的水田农业机器人,通过转向驱动机构驱动每个车轮进行360
°
独立转向,在水田作业时,可以实现全向平移和原地旋转,在换行时,机器人无需180
°
调头,即可平移至新行,在新行中进行后退,即可实现作业,通过采用前进和后退两种作业方式,解决了传统农业机器人换行调头时大面积压苗的问题,使得行走底盘在田间作业时不伤苗。
33.2、本发明中的四轮独立转向的水田农业机器人,通过设置导航系统,导航系统可以实现全局导航并规划路径,控制系统能够对行走底盘进行转向与行走的控制,实现精准对行,能够自主完成田间作业,智能化水平高。
34.3、本发明中的四轮独立转向的水田农业机器人,每个车轮可以独立进行 360
°
转向,整个机器人结构紧凑,在水田上行走更加灵活轻便,可降低机械对土壤的压实程度,通过性更强。
35.4、本发明中的四轮独立转向的水田农业机器人的导航方法,通过逐步对车轮进行微调,在完全不伤苗的情况下,实现行走底盘的换行作业,行走精度高,路线规划合理,在作业期间,行走底盘不会对作物造成损伤,提高了作业效果。
附图说明
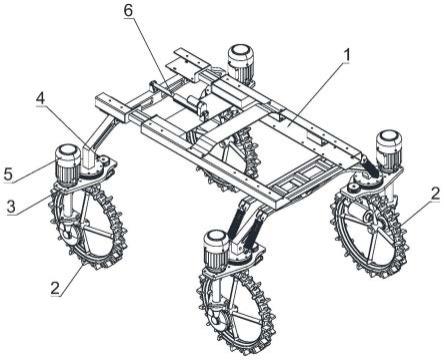
36.图1-图3为本发明中的一种四轮独立转向的水田农业机器人的第一种具体实施方式的结构示意图,其中,图1为立体图,图2为另一个视角方向的立体图,图3为侧视图。
37.图4-图5为本发明中的行走转向机构的结构示意图,其中,图4为立体图,图5为另一个视角方向的立体图.
38.图6为本发明中的底盘架的立体结构示意图。
39.图7为本发明中的弹性摆动机构的立体结构示意图。
40.图8为本发明中的控制系统与导航系统的结构示意图。
41.图9为本发明中的四轮独立转向的水田农业机器人的导航路径规划示意图。
42.图10为本发明中的四轮独立转向的水田农业机器人导航方法的换行的路径行驶示意图。
43.图11-图15为本发明中行走底盘在变换下一行路径进行作业的具体步骤示意图,其中,图11为步骤(2.1)时行走底盘所处位置示意图,图12为步骤(2.2) 时行走底盘所处位置示意图,图13为步骤(2.3)时行走底盘所处位置示意图,图14为步骤(2.4)时行走底盘所处位置示意图,图15为步骤(2.5)时行走底盘所处位置示意图。
具体实施方式
44.为了使本领域的技术人员很好地理解本发明的技术方案,下面结合实施例和附图对本发明作进一步描述,但本发明的实施方式不仅限于此。
45.实施例1
46.参见图1-图2,本实施例公开了一种四轮独立转向的水田农业机器人,包括用于行走与转向的行走底盘、用于控制所述行走底盘进行行走与转向的控制系统以及用于对行走底盘进行导航的导航系统;所述控制系统分别与所述行走底盘、所述导航系统连接。
47.参见图1-图3,所述行走底盘包括用于安装作业机具的底盘架1、设置在所述底盘架1上的四个车轮2以及设置在所述底盘架1与每个所述车轮2之间用于驱动车轮2行走与转向的行走转向机构,即四个车轮2对应四个行走转向机构,分别对四个车轮2进行独立控制;其中,所述行走转向机构的上端与所述底盘架1连接,下端与所述车轮2连接;该行走转向机构包括基座3、转向驱动机构4以及行走驱动机构5,其中,所述基座3设置在所述底盘架1与所述车轮 2之间,所述基座3的上端与所述底盘架1连接,下端与所述车轮2连接;所述转向驱动机构4用于驱动所述车轮2进行360
°
转向;所述行走驱动机构5用于驱动所述车轮2进行行走。
48.参见图1-图3,本实施例中的水田农业机器人,通过转向驱动机构4驱动每个车轮2进行360
°
独立转向,在水田作业时,可以实现全向平移和原地旋转,在换行时,机器人无需180
°
调头,即可平移至新行,在新行中进行后退,即可实现作业,通过采用前进和后退两种作业方式,解决了传统农业机器人换行调头时大面积压苗的问题,使得行走底盘在田间作业时不伤苗。通过设置导航系统,导航系统可以实现全局导航并规划路径,控制系统能够对行走底盘进行转向与行走的控制,实现精准对行,能够自主完成田间作业,智能化水平高。每个车轮2可以独立进行360
°
转向,整个机器人结构紧凑,在水田上行走更加灵活轻便,通过性更强。
49.参见图2-图5,所述转向驱动机构4包括转动设置在所述基座3上的转向主动齿轮4-1、固定设置在所述底盘架1上的转向从动齿轮4-2以及安装在所述基座3上的转向驱动电机4-3;所述转向主动齿轮4-1与所述转向从动齿轮4-2相互啮合,所述转向驱动电机4-3的驱动端与所述转向主动齿轮4-1连接,其中,所述基座3转动连接在所述底盘架1上。采用上述结构,通过转向驱动电机4-3 驱动转向主动齿轮4-1转动,由于转向从动齿轮4-2固定在底盘架1上,使得转向主动齿轮4-1绕着转向从动齿轮4-2旋转,从而带动基座3进行转动,进而带动车轮2实现360
°
转向。
50.参见图2-图5,行走驱动机构5包括行走驱动电机5-1、支撑臂5-2、传动轴以及锥齿轮减速机5-3,其中,所述支撑臂5-2的上端固定设置在所述基座3 的下端,所述锥齿轮减速机5-3安装在所述支撑臂5-2的下端,所述行走驱动电机5-1安装在基座3的上端;所述支撑臂5-2为中空结构,所述传动轴设置在所述支撑臂5-2的内部;该传动轴的上端与所述行走驱动电机5-1的驱动端连接,下端与所述锥齿轮减速机5-3的输入端连接,所述车轮2与所述锥齿轮减速机5-3的输出端连接。通过设置行走驱动机构5,行走驱动电机5-1驱动传动轴转动,带动锥齿轮减速机5-3转动,然后带动车轮2转动,实现了车轮2 行走功能;通过设置支撑臂5-2,且行走驱动电机5-1安装在基座3上,其目的在于,使得车轮2周围的结构变得紧凑,减少车轮2的转向范围,保证在转向时,行走驱动电机5-1等结构损伤水稻,减少了伤苗
问题的发生。
51.参见图5,所述锥齿轮减速机5-3包括安装在支撑臂5-2下端的壳体5-31、设置在所述壳体5-31内部的主动锥形齿轮与从动锥形齿轮;其中,所述主动锥形齿轮与从动锥形齿轮相互啮合,该主动锥形齿轮与所述传动轴的下端连接;所述从动锥形齿轮与所述车轮2连接。通过设置上述结构,行走驱动电机5-1 驱动传动轴转动,带动主动锥形齿轮转动,从而带动从动锥形齿轮转动,进而带动车轮2的转动,实现了车轮2行走功能。
52.参见图3,所述转向从动齿轮4-2的轴线与所对应位置的车轮2处于同一平面,其目的在于,能够降低车轮2转向时所需要的扭矩,使得结构变得更加紧凑,进一步减少车轮2的转向范围,配合四个转向驱动机构4,实现行走底盘全向平移和原地旋转。
53.参见图1-图4和图6,所述底盘架1包括车架1-1、设置在所述底盘架1前后两端的前桥1-2与后桥1-3;所述前桥1-2与所述后桥1-3的两端均设有法兰盘1-4,所述基座3通过轴承15转动连接在所述前桥1-2、后桥1-3的法兰盘 1-4上,所述转向从动齿轮4-2固定在前桥1-2、后桥1-3的法兰盘1-4上;其中,所述后桥1-3与所述车架1-1之间设有用于调节前桥1-2与后桥1-3之间距离的轴距调节机构6;所述轴距调节机构6包括用于引导所述后桥1-3在车架 1-1上滑动的导向组件以及用于驱动所述后桥1-3沿着车架1-1进行滑动的轴距驱动组件。采用上述结构,轴距驱动组件可以驱动后桥1-3在车架1-1上滑动,从而调节前桥1-2与后桥1-3之间距离,进而调节位于前端车轮2与后端车轮2 之间的轴距;通过实现轴距调节,可以根据水稻之间的行距对轴距进行适应性调节,从而避免车轮2在原地转向时损伤水稻;另外,导向组件可以使后桥1-3 在车架1-1上运动的更加稳定。
54.参见图2和图6,所述轴距驱动组件为电动推杆6-1,该电动推杆6-1的一端与所述后桥1-3连接,另一端与所述车架1-1连接。通过电动推杆6-1驱动自身的伸缩杆运动,从而可以带动后桥1-3在车架1-1上移动,实现轴距调节。
55.参见图2和图6,所述导向组件包括两条平行设置在所述后桥1-3上的导杆 6-2以及设置所述车架1-1上且与所述导杆6-2滑动配合的导向槽6-3。通过导向槽6-3与导杆6-2的配合,在调节轴距的过程中,后桥1-3在车架1-1上运动的更加稳定。
56.参见图2-图3和图6-图7,所述前桥1-2与所述车架1-1通过弹性摆动机构连接,所述弹性摆动机构连接包括设置在所述前桥1-2中部的铰接结构以及设置在所述前桥1-2两端的减震器7,所述前桥1-2的中部通过所述铰接结构铰接在所述车架1-1上,所述减震器7的一端铰接在所述车架1-1上,另一端铰接在所述前桥1-2上。通过设置弹性摆动机构,可以实现前桥1-2的左右摆动,可以使得行走底盘适应不平的路面,起到缓冲、减震的效果。
57.参见图6-图7,所述车架1-1两侧焊接有吊耳8,所述减震器7共有四个,前桥1-2的每端各两个,该减震器7一端铰接在吊耳8上,另一端通过阶梯轴铰接在前桥1-2上的孔位上。每端安装两个减震器7,左右对称安装,一共四根,用于减轻摆动幅度,起到减缓冲击的效果。
58.参见图6-图7,所述铰接结构包括焊接在车架1-1上的前叉板9、摆动轴以及设置在前桥1-2中部的台阶孔;所述摆动轴通过两个圆锥滚子轴承安装在前桥 1-2中部的台阶孔上;所述前叉板9铰接在摆动轴上。通过摆动轴与前叉板9铰接,使前桥1-2可绕着摆动轴左右摆动,实现前桥1-2的浮动,在遇到不规则路面时,弹性摆动机构能够保证四个车轮2与地面接触,保证动力的有效输出。
59.参见图2和图6-图7,所述车架1-1为u型槽钣金结构,u型槽内装有六块 u型板加固,车架1-1中部装有上下两块支撑板,上支撑板11主要其固定作用,下支撑板12用于固定车架1-1和安装机具、电动推杆6-1或机械手;前桥1-2 通过摆动架10安装在车架1-1的前端,后桥1-3通过四个角铁安装在车架1-1 的另一端。
60.参见图8,所述控制系统包括底层控制单元、终端执行节点、电机驱动器、远程遥控器以及接收机;所述远程遥控器与所述接收机连接,用于远程发送命令给接收机;所述接收机与所述底层控制单元连接,用于接收远程遥控器的命令;所述底层控制单元与所述电机驱动器连接,实现行走底盘的前进、后退以及转向;所述底层控制单元与所述终端执行节点连接;所述终端执行节点与所述作业机具连接,用于控制作业机具的启停。上述结构中,通过远程遥控器发送命令给接收机,接收机接收远程遥控器发送的命令,再将命令发送至底层控制单元,通过电机驱动器、终端执行节点分别控制行走底盘的前进、后退、转向以及作业机具的启停,从而实现对机器人的远程遥控。
61.参见图8,导航系统包括机载电脑、惯性测量单元、全球定位系统、视觉相机、无线通讯模块以及远程终端;其中,所述惯性测量单元、全球定位系统和视觉相机分别通过串口与所述机载电脑连接;所述远程终端通过所述无线通讯模块与所述机载电脑连接;该机载电脑与所述底层控制单元连接。通过设置上述机构,可以实现机器人的自动导航;全球定位系统和惯性测量单元为自动导航提供位置和姿态信息(即定位信息);视觉相机可实时获取苗带或杂草信息 (即视觉信息),可以避免行走底盘在作业过程中压苗;远程终端可以设置机器人的行走底盘参数与作业参数,并将参数设置信息通过无线通讯模块发送至机载电脑;机载电脑可以融合定位信息和视觉信息以及接受参数设置信息,并发送控制命令给底层控制单元,控制行走底盘按照设定的路径自动驾驶。
62.参见图8,所述机载电脑为上位机,型号为tx2,惯性测量单元(ium)、视觉相机和全球定位系统(global positioning system,简称gps)均通过usb 与上位机连接,所述无线通讯模块为路由器,通过局域网与远程终端与上位机连接,远程终端可以为手机、平板电脑或者电脑等,底层控制单元为核心控制模块,通过can总线与终端执行节点连接;所述作业机具可以为施肥装置或者喷药装置。
63.参见图8,通过导航系统可以实现行走底盘的自动导航,具体地,自动导航包括路径规划和路径追踪,所述路径追踪包括直线跟踪和换行;直线跟踪时,全球定位系统提供位置信息,机载电脑会根据位姿信息控制行走底盘的方向,使底盘行驶路径与规划路径重合,即通过惯性测量单元以及全球定位系统提供的位置和姿态信息实时调整行走底盘的前进速度及航向角来进行路径追踪;作业时,先采用全球定位系统实现绝对定位,再利用视觉相机识别作物行,并作为导航线,实现相对定位,机载电脑融合两者数据使机器人精准在作物行间行走;在换行时,四个轮子可以同时转90
°
,使底盘侧向平移至新行继续作业,换行时通过采用前进、平移、后退完成作业,避免了换行调头造成的大面积压苗。另外,通过视觉相机可以实时检测行间作物,采用全球定位系统导航为主,视觉导航为辅,视觉导航可以弥补作业过程中仅靠全球定位系统导航出现的对作物行不准的问题,实现精准对行,避免作业时压苗。
64.本实施例的机器人的行走底盘为电动底盘,电源为锂电池,锂电池设置在电池盒内,可输出48v、24v和5v电压,可为行走驱动机构5、转向驱动机构4、控制系统、导航系统以
及作业机具供电。
65.参见图1,所述车轮2为水田轮,具有较强的通过性。本实施例的机器人包括遥控模式和自主模式,自主模式可用远程终端进行设置,行走底盘能自主规划路径并且自主完成作业,在任意情况下可切换遥控模式,该模式下可用遥控器远程操作机器人的行走底盘。
66.参见图1-图3,上述水田农业机器人的工作原理是:
67.工作时,四个车轮2分别通过行走转向机构进行独立驱动,通过转向驱动机构4驱动车轮2进行360
°
转向;由于每个车轮2与底盘架1均设有行走转向机构,因此,四个车轮2可以实现独立转向,在水田作业时,可以实现全向平移和原地旋转,导航系统可以实现全局导航并规划路径,控制系统能够对行走底盘进行转向与行走的控制,搭载作业机具后,实现田间管理。
68.参见图8-图15,本实施例还公开了一种四轮独立转向的水田农业机器人的导航方法,包括以下步骤:
69.(1)对目标水田13进行路径规划;
70.(2)导航系统获取当前的位置信息与姿态信息,并结合规划的路径生成命令,将命令发送至控制系统,控制系统控制行走底盘行驶的路径14与规划的路径重合;其中,行走底盘在变换下一行路径14进行作业的具体步骤为:
71.(2.1)四个车轮2位于两纵行作物16之间的中心线a与两横行作物16之间的中心线b相交的位置上;其中,两纵行作物之间所形成的通道为纵向通道 17,两横行作物之间所形成的通道为横向通道18,纵向通道17与横向通道18 交错排列;两纵行作物之间的中心线a为纵向通道17的中心线a,两横行作物之间的中心线b为横向通道18的中心线b;此时,每个车轮2所在的横向通道 18为换行初始横向通道;
72.(2.2)转向驱动机构4同时驱动四个车轮2原地转向(原地顺时针转向),使得每个车轮2指向下一横向通道18上在靠近车轮2旁的纵行上的两株作物16 之间的中点,行走驱动机构5驱动每个车轮2行走至对应的中点位置处,(即车轮2位于横向通道18的中心线上);
73.(2.3)转向驱动机构4同时驱动四个车轮2朝着相同方向原地转向(原地顺时针转向),使得每个车轮2指向的方向与横向通道18的中心线b重合,行走驱动机构5驱动每个车轮2行走,使得行走底盘平移至下一行路径上,此时,每个车轮2位于纵行上的两株作物之间的中点;
74.(2.4)转向驱动机构4同时驱动四个车轮2朝着相同方向原地转向(原地顺时针转向),使得每个车轮2指向换行初始横向通道的中心线b与下一纵向通道17的中心线a相交的位置上,行走驱动机构5驱动每个车轮2行走至该位置上;
75.(2.5)转向驱动机构4同时驱动四个车轮2朝着相同方向原地转向(原地顺时针转向),使得每个车轮2指向的方向与纵向通道17的中心线重合。
76.换行完成后,行走底盘由前进改为后退,进行作业,当需要继续换行操作时,重复上述步骤(2.1)-(2.5)。
77.本实施例中的四轮独立转向的水田农业机器人的导航方法,通过逐步对车轮2进行微调,在完全不伤苗的情况下,实现行走底盘的换行作业,行走精度高,路线规划合理,在作业期间,行走底盘不会对作物造成损伤,提高了作业效果;通过视觉相机,可以识别作物,使得四个车轮2行走至横向通道18与纵向通道17的中心线的位置,以及两珠作物的中点。
78.参见图8,步骤(1)中,对目标水田进行路径规划的具体步骤为:操作员手持远程终端,记录目标水田的边界点位置,机载电脑根据边界点位置信息自动生成目标水田的形状,再根据目标水田的形状规划出作业路径,并回传至远程终端以图形显示。
79.参见图8,步骤(2)中,导航系统获取当前的位置信息和姿态信息,并结合规划的路径生成命令,将命令发送至控制系统,控制系统控制行走底盘行驶的路径与规划的路径重合的具体步骤为:全球定位系统获取当前的位置信息,惯性测量单元获取当前的姿态信息,并将位置信息与姿态信息发送至机载电脑,机载电脑根据位置信息、姿态信息以及规划的路径生成命令,将命令发送至底层控制单元,底层控制单元控制行走底盘的方向,使得行走底盘行驶的路径与规划的路径重合。
80.参见图10-图15,在步骤(2.2)和(2.3)中,转向驱动机构4驱动车轮2 的累计转向角度为90
°
,在步骤(2.4)和(2.5)中,转向驱动机构4驱动车轮 2的累计转向角度也为90
°
。通过累计转向90
°
,使得在换下一行路径时,行走底盘可以横向平移至新一行路径继续作业,实现的精准的作业,同时也避免了伤秒。
81.参见图2,在步骤(2.1)中,通过轴距调节机构6调节前桥1-2与后桥1-3 的距离,使得前桥1-2上和车轮2和后桥1-3上的车轮2均位于横向通道18的中心线上。
82.实施例2
83.本实施例中的其它结构与实施例1相同,不同之处在于,所述轴距驱动组件可以为液压推杆或者采用电机与丝杆传动结合的方式。
84.上述为本发明较佳的实施方式,但本发明的实施方式并不受上述内容的限制,其他的任何未背离本发明的精神实质与原理下所做的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1