爬壁机器人的制作方法
1.本发明涉及机器人技术领域,具体为爬壁机器人。
背景技术:
2.爬壁机器人可以在垂直墙壁上攀爬并完成作业的自动化机器人。爬壁机器人又称为壁面移动机器人,因为垂直壁面作业超出人的极限,因此在国外又称为极限作业机器人。爬壁机器人必须具备吸附和移动两个基本功能,而常见吸附方式有负压吸附和永磁吸附两种。其中负压方式可以通过吸盘内产生负压而吸附于壁面上,不受壁面材料的限制;永磁吸附方式则有永磁体和电磁铁两种方式,只适用于吸附导磁性壁面。爬壁机器人主要用于石化企业对圆柱形大罐进行探伤检查或喷漆处理,或进行建筑物的清洁和喷涂,现有的爬壁机器人,大多数仅仅适用于特定的壁面作业,面向错综复杂的基础设施壁面则无法胜任,造成爬壁机器人的适应性较差,为此,提出爬壁机器人。
技术实现要素:
3.本发明的目的在于提供爬壁机器人,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:爬壁机器人,包括机体,所述机体一侧设有负压吸附组件,所述负压吸附组件一侧设有移动吸附组件;
5.所述移动吸附组件包括第二固定架和支撑板,两个所述第二固定架内壁固定有第二电机,所述第二电机输出轴端固定有第一锥型齿,所述第一锥型齿啮合连接有第二锥型齿,所述第二锥型齿一侧固定有第二转轴,所述第二转轴一侧固定有第一齿轮,四个所述支撑板分别通过轴承转动连接有数量为四个的第一转轴和第三转轴,所述第三转轴外侧固定套接有数量为两个的第二齿轮,所述第一齿轮与第二齿轮外侧绕接有第二同步带,所述第二同步带外侧粘接有第二耐磨海绵,所述第二耐磨海绵一侧开设有限位槽,所述限位槽内侧粘接有黏附层。
6.作为本技术方案的进一步优选的:所述第一转轴外侧固定套接有第三齿轮,所述第三齿轮与第二齿轮外侧绕接有第一同步带,所述第一同步带外侧粘接有第一耐磨海绵。
7.作为本技术方案的进一步优选的:所述负压吸附组件包括第一固定架和支撑架,所述第一固定架顶部开设有数量为两个的排气架,所述排气架底部固定有第一电机。
8.作为本技术方案的进一步优选的:所述支撑架内部固定有数量为两个的涡流叶轮,所述涡流叶轮进气端连通有固定插入于支撑架一侧的进气管。
9.作为本技术方案的进一步优选的:所述第一电机的输出轴端固定于涡流叶轮的输入轴端,所述支撑架一侧设有位于进气管一侧的负压腔,所述负压腔一侧设有数量为两个的隔板,所述隔板的顶部固定于支撑架的底部,所述隔板的两侧分别抵触于第一同步带和第二同步带的一侧。
10.作为本技术方案的进一步优选的:所述支撑架底部固定有连接架,所述连接架内侧壁粘接有过滤网。
11.作为本技术方案的进一步优选的:所述机体一侧固定有限位架,所述限位架的一侧抵触有固定于第二转轴外侧的限位板。
12.作为本技术方案的进一步优选的:所述机体一侧固定有放置架,所述支撑架内部设有蓄电池,所述蓄电池的输出端分别电性连接于第一电机和第二电机的输入端。
13.作为本技术方案的进一步优选的:所述第二固定架的一侧固定于机体的一侧,所述支撑板和支撑架的顶部固定于机体的底部,所述第一固定架底部固定于机体的顶部。
14.作为本技术方案的进一步优选的:黏附层的制作方法,包括以下步骤:
15.s1、硅片清洗,选取酒精、丙酮、双氧水、浓硫酸四种溶液,使用酒精、丙酮、双氧水、浓硫酸四种溶液依次对硅片进行清洗,同时将硅片分别放置在以上溶液中8小时,清洗完成后取出硅片备用;
16.s2、镀银,选取离子水、硝酸银、氢氟酸三种溶液,该离子水、硝酸银、氢氟酸三种溶液混合得到混合溶液,将硅片放置在混合溶液内浸泡2个小时,浸泡完成后取出硅片备用;
17.s3、硅表面阵列,选取去离子水、双氧水、氢氟酸三种溶液,将离子水、双氧水、氢氟酸三种溶液混合得到混合溶液,将硅片放置在混合溶液内480秒,可以使得硅片表面产生阵列特征;
18.s4、去银膜,选取浓硝酸溶液,将硅片放置在浓硝酸溶液中浸泡,浸泡时间为60秒,取出硅片,此时硅片表面的阵列模板制作完成;
19.s5、阵列模板,选取一定量的去离子水,使用去离子水对硅片表面进行清洗,清洗后将硅片自然晾干;
20.s6,粘附层,选取一定量的聚氨酯液体,将聚氨酯液体倒在硅片表面,除去硅片表面的气泡,同时使用烘箱对硅片进行加热,加热2小时后,沿着硅片一侧,将加热后变成聚氨酯固体层缓缓地从硅片表面剥离,此时即可得到黏附层;
21.s7、将得到的黏附层一侧与限位槽内侧涂抹一定量的涂抹聚氨酯粘结剂,将黏附层粘在限位槽的内侧。
22.与现有技术相比,本发明的有益效果是:
23.一、本发明基于滚动吸附与生物黏附技术相结合,在负压吸附和黏附层的配合下,爬壁机器人在光滑壁面行走时,依靠黏附层与光滑避免的相互贴合,使得该爬壁机器人可以吸附在壁面表面,黏附层显著增大了两者之间的摩擦力,有效避免了机器人的整机滑动;
24.二、爬壁机器人在粗糙壁面爬行时,第一耐磨海绵和第二耐磨海绵可模仿生物吸盘边缘肌肉与壁面的密封机理,实现与壁面凸凹颗粒相互交错进而有效避免了外界空气的进入,保证了负压腔内部的真空;依靠第一同步带和第二同步带转动时,始终在形成一个动态负压腔,机器人实现了与水平面呈0-360
°
的多种复杂光滑与粗糙壁面的爬行,减少了负压腔与壁面之间的磨损,提高了机器人在壁面适应性和重复使用率。
附图说明
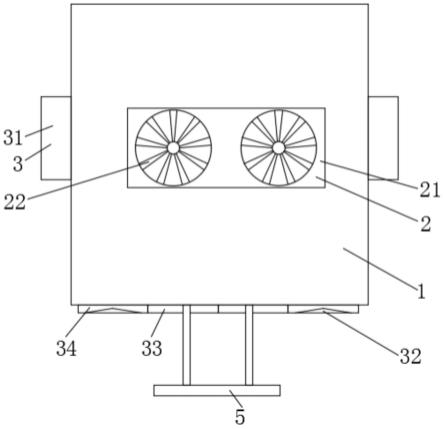
25.图1为本发明的俯视结构示意图;
26.图2为本发明的俯视剖面结构示意图;
27.图3为本发明的锥型齿配合处结构示意图;
28.图4为本发明的左视剖面结构示意图;
29.图5为本发明的黏附层分布结构示意图;
30.图6为本发明的第二转轴立体结构示意图;
31.图7为本发明的黏附层制作方法工艺流程图。
32.图中:1、机体;2、负压吸附组件;21、第一固定架;22、排气架;23、第一电机;24、进气管;25、过滤网;26、隔板;27、负压腔;28、支撑架;29、连接架;210、涡流叶轮;3、移动吸附组件;31、第二固定架;32、黏附层;33、第一耐磨海绵;34、第二耐磨海绵;35、第一齿轮;36、第二电机;37、限位槽;38、支撑板;39、第一转轴;310、第二齿轮;311、限位架;312、限位板;313、第二转轴;314、第一锥型齿;315、第二锥型齿;316、第三转轴;317、第三齿轮;5、放置架;6、蓄电池;7、第一同步带;8、第二同步带。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.实施例1
35.请参阅图1-6,本发明提供一种技术方案:爬壁机器人,包括机体1,机体1一侧设有负压吸附组件2,负压吸附组件2一侧设有移动吸附组件3,机体1一侧固定有放置架5,支撑架28内部设有蓄电池6,蓄电池6的输出端分别电性连接于第一电机23和第二电机36的输入端,蓄电池6用于提供该机器人工作的电力来源,本机器人的自重为3kg,直壁面有效承载大于1kg,天花板壁面有效承重0.3kg,地面最大运动速度10cm/s,壁面最大运动速度不小于8cm/s,壁面续驶里程1公里。
36.负压吸附组件2包括第一固定架21和支撑架28,第一固定架21顶部开设有数量为两个的排气架22,排气架22的形状为辐射栅格状,这种形状既能确保将负压腔27中的气体排出,又能起到固定直流高速第一电机23作用,排气架22底部固定有第一电机23,支撑架28内部固定有数量为两个的涡流叶轮210,涡流叶轮210进气端连通有固定插入于支撑架28一侧的进气管24,负压吸附组件2是由两个第一电机23和涡流叶轮210组成的,避免单涡流叶轮210故障造成的安全事故,第一电机23的输出轴端固定于涡流叶轮210的输入轴端,支撑架28一侧设有位于进气管24一侧的负压腔27,负压腔27一侧设有数量为两个的隔板26,隔板26的顶部固定于支撑架28的底部,隔板26的两侧分别抵触于第一同步带7和第二同步带8的一侧,第一电机23输出轴与涡流叶轮210采用过渡配合连接,支撑架28底部固定有连接架29,连接架29内侧壁粘接有过滤网25,过滤网25用于过滤空气中的灰尘,第二固定架31的一侧固定于机体1的一侧,支撑板38和支撑架28的顶部固定于机体1的底部,第一固定架21底部固定于机体1的顶部。
37.移动吸附组件3包括第二固定架31和支撑板38,两个第二固定架31内壁固定有第二电机36,第二电机36输出轴端固定有第一锥型齿314,第一锥型齿314啮合连接有第二锥型齿315,通过第一锥型齿314转动,带动啮合连接的第二锥型齿315转动,使得机体1两侧的第一齿轮35同时转动,第二锥型齿315一侧固定有第二转轴313,第二转轴313一侧固定有第一齿轮35,四个支撑板38分别通过轴承转动连接有数量为四个的第一转轴39和第三转轴
316,第一转轴39和第三转轴316远离支撑板38一侧通过轴承转动连接于机体1的一侧,第三转轴316外侧固定套接有数量为两个的第二齿轮310,通过第二同步带8,第一齿轮35带动第二齿轮310转动,同时第二齿轮310是固定在第三转轴316外侧的,并且第二齿轮310通过第一同步带7与第一同步带7相连接,使得一侧的第一齿轮35转动,通过第一同步带7和第二同步带8的作用下,同时带动第二齿轮310和第三齿轮317同向转动,当需要转向时,只需要相应一侧的第二电机36停止转动,另外一侧的第二电机36继续转动,此时可以完成爬壁机器人的转向动作,第一齿轮35与第二齿轮310外侧绕接有第二同步带8,第二同步带8外侧粘接有第二耐磨海绵34,第二耐磨海绵34一侧开设有限位槽37,限位槽37内侧粘接有黏附层32,黏附层32显著增大了两者之间的摩擦力,有效避免了机器人的整机滑动,第一转轴39外侧固定套接有第三齿轮317,第三齿轮317与第二齿轮310外侧绕接有第一同步带7,第一同步带7外侧粘接有第一耐磨海绵33,第一耐磨海绵33和第二耐磨海绵34的制作材料为耐磨海绵与弹性材料组成,机体1一侧固定有限位架311,限位架311的一侧抵触有固定于第二转轴313外侧的限位板312,限位架311用于放置第二转轴313在转动时的限位,采用滚动吸附与生物黏附技术相结合,爬壁机器人可携带检测实现高层建筑、大坝、桥梁隧道多种基础设施外壁面的接触检测,同时还可实现外壁面病害数据的收集,为基础设施的定量、定时运维提供数据支撑。
38.工作原理:使用时,工作人员首先将用于拍摄的相机固定在放置架5的一侧,同时将蓄电池6充满电,此时将机器人放置在壁面,在第一电机23开始工作时,第一电机23的输出轴端固定在涡流叶轮210的输入轴一侧,同时带动涡流叶轮210转动,在涡流叶轮210转动时,将负压腔27内部的空气经过进气管24吸入,同时将空气通过第一固定架21顶部的排气架22排出,此时在负压腔27内部会产生负压使得该机器人吸附在外壁面;当需要控制爬壁机器人在壁面的行走时,只需要机体1两侧的第二电机36同时转动,第二电机36的输出轴端带动第一锥型齿314,通过第一锥型齿314转动,带动啮合连接的第二锥型齿315转动,使得机体1两侧的第一齿轮35同时转动,并且通过第二同步带8,第一齿轮35带动第二齿轮310转动,同时第二齿轮310是固定在第三转轴316外侧的,并且第二齿轮310通过第一同步带7与第一同步带7相连接,使得一侧的第一齿轮35转动,通过第一同步带7和第二同步带8的作用下,同时带动第二齿轮310和第三齿轮317同向转动,当需要转向时,只需要相应一侧的第二电机36停止转动,另外一侧的第二电机36继续转动,此时可以完成爬壁机器人的转向动作,并且粘接在第一同步带7和第二同步带8外侧的第一耐磨海绵33和第二耐磨海绵34,使得共计六个的第一耐磨海绵33和第二耐磨海绵34,围绕在负压腔27四周形成真空区域,依靠第一同步带7和第二同步带8转动时,始终形成一个动态负压腔27,负压腔27四周的第一耐磨海绵33和第二耐磨海绵34,采用先进的柔性密封材料,确保第一耐磨海绵33和第二耐磨海绵34转动过程中负压腔27不发生漏气,机器人实现了与水平面呈0-360
°
的多种复杂光滑与粗糙壁面的爬行,减少了负压腔27与壁面之间的磨损,提高了机器人的壁面适应性和重复使用率,在第一耐磨海绵33和第二耐磨海绵34之间的隔板26材质为麦拉片,提高了第一耐磨海绵33和第二耐磨海绵34之间的气密性和耐磨性,当爬壁机器人在光滑壁面行走时,依靠黏附层32与光滑避免的相互贴合,使得该爬壁机器人可以吸附在壁面表面,黏附层32显著增大了两者之间的摩擦力,有效避免了机器人的整机滑动;当机器人在粗糙壁面爬行时,第一耐磨海绵33和第二耐磨海绵34可模仿生物吸盘边缘肌肉与壁面的密封机理,实现与壁
面凸凹颗粒相互交错进而有效避免了外界空气的进入,保证了负压腔27内部的真空度。
39.实施例2
40.请参阅图7,本发明还提供了爬壁机器人中黏附层32的制作方法,包括以下步骤:
41.s1、硅片清洗,选取酒精、丙酮、双氧水、浓硫酸四种溶液,使用酒精、丙酮、双氧水、浓硫酸四种溶液依次对硅片进行清洗,同时将硅片分别放置在以上溶液中7-9小时,清洗完成后取出硅片备用;
42.s2、镀银,选取离子水、硝酸银、氢氟酸三种溶液,该离子水、硝酸银、氢氟酸三种溶液混合得到混合溶液,将硅片放置在混合溶液内浸泡1-3个小时,浸泡完成后取出硅片备用;
43.s3、硅表面阵列,选取去离子水、双氧水、氢氟酸三种溶液,将离子水、双氧水、氢氟酸三种溶液混合得到混合溶液,将硅片放置在混合溶液内470-490秒,可以使得硅片表面产生阵列特征;
44.s4、去银膜,选取浓硝酸溶液,将硅片放置在浓硝酸溶液中浸泡,浸泡时间为50-70秒,取出硅片,此时硅片表面的阵列模板制作完成;
45.s5、阵列模板,选取一定量的去离子水,使用去离子水对硅片表面进行清洗,清洗后将硅片自然晾干;
46.s6,粘附层,选取一定量的聚氨酯液体,将聚氨酯液体倒在硅片表面,除去硅片表面的气泡,同时使用烘箱对硅片进行加热,加热1-3小时后,沿着硅片一侧,将加热后变成聚氨酯固体层缓缓地从硅片表面剥离,此时即可得到黏附层32;
47.s7、将得到的黏附层32一侧与限位槽37内侧涂抹一定量的涂抹聚氨酯粘结剂,将黏附层32粘在限位槽37的内侧。
48.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1