一种微型检测机器人的制作方法
本发明涉及机器人领域,特别是涉及一种微型检测机器人。
背景技术:
1、工业用大型设备,如汽轮机、水电站大型设备等,由于其复杂性和密闭性,在使用过程中的定期维护检测成为工程技术人员的一大难题。大型装置设备内部部件随使用时间的增加,其内部部件可能出现裂纹、局部老化和部件表面存在囤积异物的现象,如无法及时发现并处理,极易引发相关事故而造成经济损失或人身伤害等,给生产生活带来不利影响。
2、目前,大型设备由于内部空间狭小、深度大、一般的检测设备难以到达内部检测,通常需要工作人员打开设备外壳后使用检测装置进行检测,因此现有的检测方式劳动强度大、效率较低。
3、现有技术中,能够类似深入设备内部的机器人多为使用磁吸附轮吸附在管道内壁、外壁上,或是沿管道内壁、外壁行走的管道检测机器人。其中,管道检测机器人使用场景仅限于圆柱形状的管道。而其他类型的检测机器人,如履带爬壁检测机器人和轮腿复合机器人,其运动步态单一、体积较大难以深入到大型设备内部,且遇到比自身高度高的障碍物时越障能力不足。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明要解决的技术问题在于提供一种微型检测机器人。
2、本发明提出一种微型检测机器人,包括第一行走部、第二行走部以及连接该第一行走部和第二行走部的多自由度连接臂;所述第一行走部和第二行走部均用于驱动所述机器人行走;所述多自由度连接臂至少包括一个运动调整模块,所述运动调整模块包括连接的转向组件和摆动组件;摆动组件包括摆动电机,所述摆动电机的输出轴与水平面平行,所述转向组件包括转向电机,所述转向电机的输出轴沿上下方向布置;启动所述转向电机,所述第一行走部在水平面转向;启动所述摆动电机,所述第一行走部在竖直面做俯仰摆动。
3、进一步地,所述多角度自由连接臂包括调节连接臂和两个运动调整模块,两个所述运动调整模块的相近端分别连接于所述调节连接臂的两端,两个所述运动调整模块相远离的一端分别连接第一行走部和第二行走部。
4、进一步地,所述转向组件还包括用于固定所述转向电机的转向单轴支架;所述摆动电机与对应的所述第一行走部连接,所述摆动电机的输出轴固定在对应的所述转向单轴支架上。
5、进一步地,所述调节连接臂包括至少两个角度调节组件和连接在两个所述角度调节组件之间的摆动调节组件;所述角度调节组件包括两个角度调节支架和连接两个角度调节支架的角度调节电机,启动该角度调节电机时,两个角度调节支架可绕角度调节电机的输出轴为轴线转动;所述运动调整模块对应连接在远离所述摆动调节组件的所述角度调节支架上;所述摆动调节组件包括摆动调节电机,所述摆动调节电机连接于两个远离相应的所述运动调整模块的角度调节支架之间。
6、进一步地,所述行走部包括履带轮、俯仰支架和减速电机,所述多自由度连接臂与俯仰支架连接;所述减速电机设置于所述履带轮上,减速电机输出轴与俯仰支架连接,用于驱动所述俯仰支架做俯仰运动。
7、进一步地,所述行走部带有磁性。
8、进一步地,所述摆动电机、所述转向电机和所述调节摆动电机为舵机,所述舵机的输出轴扭转角度为180°;所述角度调节电机的输出轴扭转角度为360°。
9、进一步地,还设置有检测设备,用于对环境进行检测。
10、如上所述,本发明涉及的一种微型检测机器人,具有以下有益效果:
11、通过在第一行走部和第二行走部之间设置调节连接臂、运动调整模块,实现机器人的爬升、转向、扭转和伸缩,进而提升机器人的高机动性能和攀爬能力,使得机器人能够适应封闭空间、复杂地形的行走和对设备内部的检测。
技术特征:
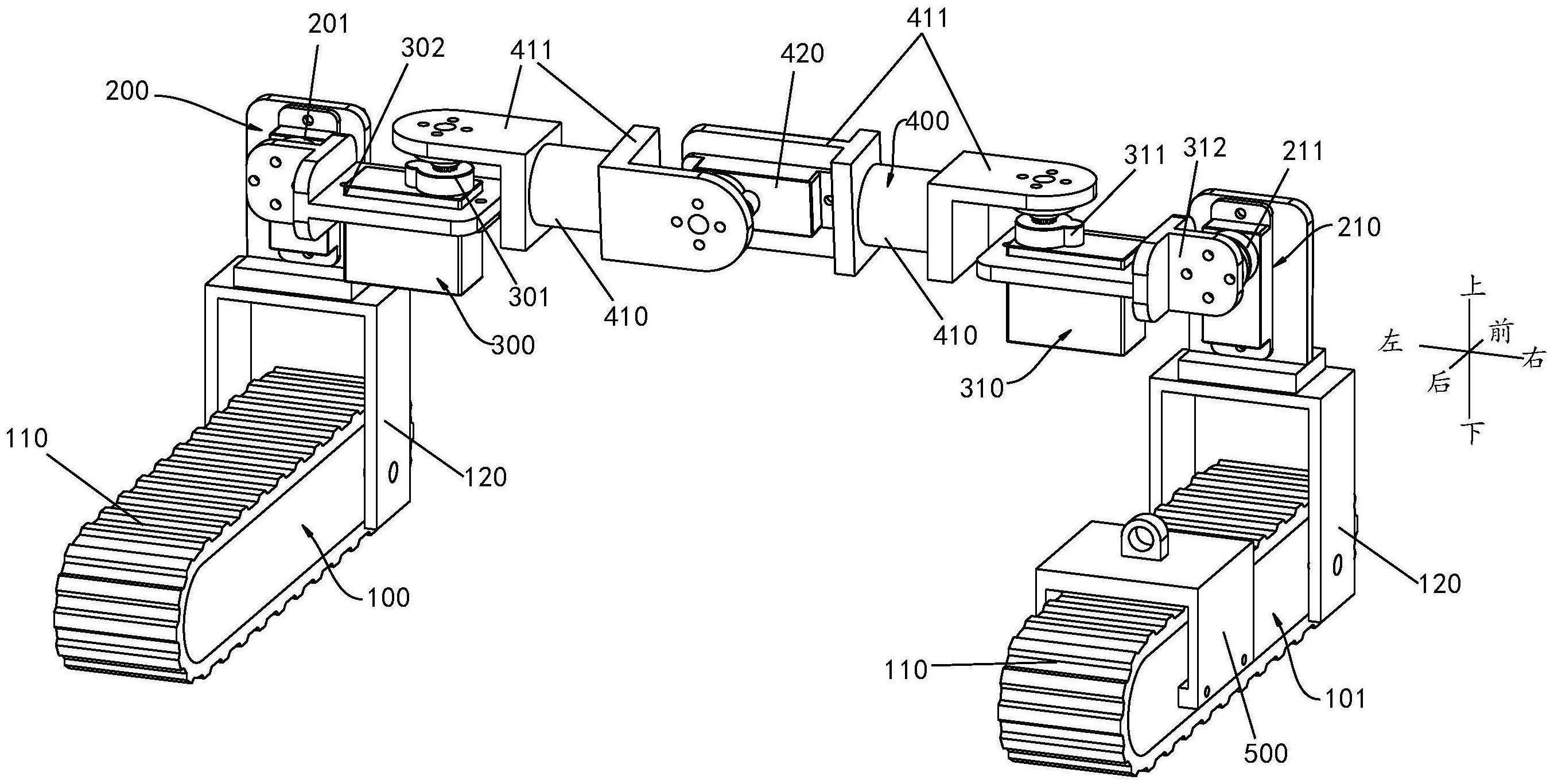
1.一种微型检测机器人,其特征在于,包括第一行走部(100)、第二行走部(101)以及连接该第一行走部(100)和第二行走部(101)的多自由度连接臂;所述第一行走部(100)和第二行走部(101)均用于驱动所述机器人行走;所述多自由度连接臂至少包括一个运动调整模块,所述运动调整模块包括连接的摆动组件(200,210)和转向组件(300,310);所述摆动组件(200,210)包括摆动电机(201,211),所述摆动电机(201,211)的输出轴沿前后方向布置;所述转向组件(300,310)包括转向电机(301,311),所述转向电机(301,311)的输出轴沿上下方向布置;启动所述摆动电机(201,211),所述第一行走部(100)在竖直面做俯仰摆动;启动所述转向电机(301,311),所述第一行走部(100)在水平面转向。
2.根据权利要求1所述的一种微型检测机器人,其特征在于,所述多角度自由连接臂包括调节连接臂和两个所述运动调整模块,两个所述运动调整模块的相近端分别连接于所述调节连接臂的两端,两个所述运动调整模块相远离的一端分别连接第一行走部(100)和第二行走部(101)。
3.根据权利要求1或2所述的一种微型检测机器人,其特征在于,所述转向组件(300,310)还包括用于固定所述转向电机(301,311)的转向单轴支架(302,312);所述摆动电机与对应的所述第一行走部(100)连接,所述摆动电机(201,211)的输出轴固定在对应的所述转向单轴支架(302,312)上。
4.根据权利要求3所述的一种微型检测机器人,其特征在于,所述调节连接臂包括至少两个角度调节组件(400)和连接在两个所述角度调节组件(400)之间的摆动调节组件;所述角度调节组件(400)包括两个角度调节支架(411)和连接两个角度调节支架(411)的角度调节电机(410);启动该角度调节电机(410)时,两个角度调节支架(411)可绕角度调节电机(410)的输出轴为轴线转动;所述运动调整模块对应连接在远离所述摆动调节组件的所述角度调节支架(411)上;所述摆动调节组件包括摆动调节电机(420),所述摆动调节电机(420)连接于两个远离相应的所述运动调整模块的角度调节支架(411)之间。
5.根据权利要求4所述的一种微型检测机器人,其特征在于,所述摆动电机(201,211)、所述转向电机(301,311)和所述调节摆动电机(420)为舵机,所述舵机的输出轴扭转角度为180°;所述角度调节电机(410)的输出轴扭转角度为360°。
6.根据权利要求1或2所述的一种微型检测机器人,其特征在于,所述第一行走部(100)或/和第二行走部(101)带有磁性。
7.根据权利要求1或2所述的一种微型检测机器人,其特征在于,所述第一行走部(100)和第二行走部(101)均包括履带轮(110)、俯仰支架(120)和减速电机,所述多自由度连接臂与俯仰支架(120)连接;所述减速电机设置于所述履带轮(110)上,减速电机输出轴与俯仰支架(120)连接,用于驱动所述俯仰支架(120)做俯仰运动。
8.根据权利要求1或2所述的一种微型检测机器人,其特征在于,还设置有检测设备固定架(500),用于固定检测设备(510)。
技术总结
一种微型检测机器人,包括第一行走部、第二行走部以及多自由度连接臂;第一行走部和第二行走部均用于驱动机器人行走;多自由度连接臂至少包括一个运动调整模块,运动调整模块包括连接的转向组件和摆动组件;摆动组件包括摆动电机,摆动电机的输出轴沿前后方向布置;转向组件包括转向电机,转向电机的输出轴沿上下方向布置;驱动转向电机,第一行走部在水平面转向;驱动摆动电机,第一行走部在竖直面做俯仰摆动;通过在第一行走部和第二行走部之间设置多自由度的连接臂、运动调整模块,实现机器人的爬升、转向、扭转和伸缩,进而提升机器人的高机动性能和攀爬能力,使得机器人能够适应封闭空间、复杂地形的行走和对设备内部的检测。
技术研发人员:韩波,朱智雄,孙林根,刘俊,梅林波,安春香,王煜,师帅,陆翌昕
受保护的技术使用者:上海电气电站设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!