一种车型制动系统结构及其前后转接机构定位计算方法与流程
1.本发明涉机械车型制动领域,具体涉及一种车型制动系统结构及其前后转接机构定位计算方法。
背景技术:
2.电动三轮车作为一种常规的车型结构,其具有普遍的运用范围,是一种较为成熟的结构形式,并且以其简单的操作、经济的合理性以及节能环保等特性深受广大用户喜爱。但是在现实中电动三轮车的研发设计都不是过于规范,导致在安全方面起到至关重要的制动系统方面都存在一定的问题,尤其在更加经济实用的机械刹车方面更是存在安全隐患。对于三轮车型而言,机械制动车型的制动分配轴的结构与位置,对整车的制动性能影响很大,尤其是重载电动三轮车型,受电池位置、电机方向等多种因素影响,限制了制动分配轴的合理布置位置。
3.传统的三轮车型机械刹车结构,在车辆正常使用的过程中,空载、轻载及重载的情况下,钢板弹簧受力不同,在根据路况的不确定性,等多重因素影响,后桥的位置会发生变化,进而影响后桥制动摇臂位置变化,导致发生制动安全隐患。
技术实现要素:
4.发明目的:提供一种车型制动系统结构,并进一步提供一种基于上述车型制动系统结构的前后转接机构定位计算方法,以解决现有技术存在的上述问题。
5.技术方案:一种车型制动系统结构,包括用于对整体部件进行承载的车体,并进一步包括制动操作组件、制动传感组件和手部制动组件三个组成部分。
6.其中,制动操作组件置于所述车体作业方向下部的前端处,用于进行制动刹车的脚步操作;
7.制动传感组件与所述制动操作组件相连,可根据所述制动操作组件的操作进行相应的传动刹车作业;
8.手部制动组件置于所述车体作业方向前端的操作平台处,并与所述制动传感组件相连,可通过手部操作带动所述制动传感组件进行静止刹车作业。
9.在进一步的实施例中,所述制动操作组件包括制动踏板组合和制动踏板拉杆两个部分。所述制动踏板组合置于所述车体作业方向下部的前端处,且所述制动踏板组合工作方向前端设有具有预定操作空间的脚踏板;所述制动踏板组合具有预定的弯折度。所述制动踏板拉杆与所述制动踏板组合工作方向后端相连,可跟随所述制动踏板组合的制动操作进行相应的传动。
10.在进一步的实施例中,所述制动传感组件包括制动分配轴组、后制动前拉杆、前后转接机构、后制动后拉杆和后制动摇臂五个部分。所述制动分配轴组与所述制动踏板拉杆相连,用于所述制动操作组件与所述制动传感组件以及所述手部制动组件之间的相互衔接与传动;所述后制动前拉杆与所述制动分配轴组相连,可跟随所述制动分配轴组的传动进
行相应的制动作业;所述前后转接机构与所述后制动前拉杆相连,用于所述制动传感组件工作方向前后部件之间的衔接与传动;所述后制动后拉杆与所述前后转接机构相连,可跟随所述后制动前拉杆的传动进行制动作业;所述后制动摇臂与所述后制动后拉杆相连,可跟随所述后制动后拉杆的制动而进行相应的刹车作业。
11.在进一步的实施例中,所述手部制动组件包括手刹制动手柄和手刹制动拉索两个部分。所述手刹制动手柄置于所述车体作业方向前端的操作平台处,用于进行手部制动操控作业,具有预定的操作空间;所述手刹制动拉索一端与所述手刹制动手柄相连,另一端与所诉前后转接机构相连,可跟随所述手刹制动手柄的制动而进行相应的传动作业,进而完成相应的静止刹车作业。
12.在进一步的实施例中,所述后制动摇臂通过钢板弹簧主片与所述车体相连,用于在所述车体运行过程中对所述车体工作方向后端进行缓冲与制动连接,且所述钢板弹簧前卷耳为固定结构。
13.在进一步的实施例中,所述制动分配轴与所述前后转接机构的旋转支点以封闭式轴承结构作为旋转介质,可减少摩擦力,增加旋转效果,提升操纵体验。
14.一种车型制动系统结构的前后转接机构定位计算方法,包括以下步骤:
15.s1、设定钢板弹簧主片的中心点为板簧主片中心点a,其在受到重力g的压型下所形成的运动轨迹为b;
16.s2、通过运动轨迹b模拟做多个点,并通过同线段平行找点法找到后制动摇臂的同步位移点;
17.s3、以后制动摇臂上各同步位移点为圆心,以制动相对距离l为半径做圆;
18.s4、多个位移点为圆心所做圆的重合点到后制动摇臂的中心距离设为l1,从后制动摇臂中心点向车体工作方向前方水平延伸li距离处即为前后转接机构的定点位置。
19.有益效果:本发明涉及一种车型制动系统结构及其前后转接机构定位计算方法,包括用于对整体部件进行承载的车体,并进一步包括制动操作组件、制动传感组件和手部制动组件三个部分。制动操作组件置于车体作业方向下方的前端处,用于进行制动刹车的脚步操作;制动传感组件与制动操作组件相连,可根据制动操作组件的操作进行传动刹车作业;置于车体作业方向前端的操作平台处,并与制动传感组件相连,可通过手部操作带动制动传感组件进行静止刹车作业。本发明通过后桥的位移量和制动摆臂的转角变化,合理的计算出制动转接点的位置及高度,以此保证整车在空车、轻载及重载的行车状态下,始终保证制动间隙,来满足对机械刹车的制动性能需求。并在确定前后转接点后在合理的布置制动分配轴,满足其他相关的制动效果,提升整车的制动安全性。本发明结构简单、安全系数高、驾乘体验舒适、经济效益合理,易于推广。
附图说明
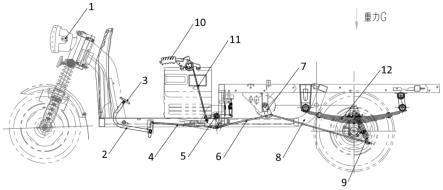
20.图1为本发明整体的侧视图。
21.图2为本发明各计算点运行轨迹计算图。
22.图中各附图标记为:车体1、制动踏板组合2、脚踏板3、制动踏板拉杆4、制动分配轴组5、后制动前拉杆6、前后转接机构7、后制动后拉杆8、后制动摇臂9、手刹制动手柄10、手刹制动拉索11、钢板弹簧主片12、各模拟点运行轨迹13、板簧主片中心点a、板簧主片中心点a
的运动轨迹b、后拉杆运动轨迹c。
具体实施方式
23.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
24.申请人认为,传统的三轮车型机械刹车结构,在车辆正常使用的过程中,空载、轻载及重载的情况下,钢板弹簧受力不同,在根据路况的不确定性,等多重因素影响,后桥的位置会发生变化,进而影响后桥制动摇臂位置变化,导致发生制动安全隐患。
25.为此,申请人设计一种车型制动系统结构及其前后转接机构7定位计算方法,通过后桥的位移量和制动摆臂的转角变化,合理的计算出制动转接点的位置及高度,以此保证整车在空车、轻载及重载的行车状态下,始终保证制动间隙,来满足对机械刹车的制动性能需求。
26.本发明涉及的车型制动系统机构主要包括包括用于对整体部件进行承载的车体1,并进一步包括制动操作组件、制动传感组件和手部制动组件三个组成部分。其中,制动操作组件置于所述车体1作业方向下部的前端处,用于进行制动刹车的脚步操作;制动传感组件与所述制动操作组件相连,可根据所述制动操作组件的操作进行相应的传动刹车作业;手部制动组件置于所述车体1作业方向前端的操作平台处,并与所述制动传感组件相连,可通过手部操作带动所述制动传感组件进行静止刹车作业。
27.进一步优选的实施方式中,所述制动操作组件包括制动踏板组合2和制动踏板拉杆4两个部分。所述制动踏板组合2置于所述车体1作业方向下部的前端处,且所述制动踏板组合2工作方向前端设有具有预定操作空间的脚踏板3;所述制动踏板组合2具有预定的弯折度。所述制动踏板拉杆4与所述制动踏板组合2工作方向后端相连,可跟随所述制动踏板组合2的制动操作进行相应的传动。
28.进一步优选的实施方式中,所述制动传感组件包括制动分配轴组5、后制动前拉杆6、前后转接机构7、后制动后拉杆8和后制动摇臂9五个部分。所述制动分配轴组5与所述制动踏板拉杆4相连,用于所述制动操作组件与所述制动传感组件以及所述手部制动组件之间的相互衔接与传动;所述后制动前拉杆6与所述制动分配轴组5相连,可跟随所述制动分配轴组5的传动进行相应的制动作业;所述前后转接机构7与所述后制动前拉杆6相连,用于所述制动传感组件工作方向前后部件之间的衔接与传动;所述后制动后拉杆8与所述前后转接机构7相连,可跟随所述后制动前拉杆6的传动进行制动作业;所述后制动摇臂9与所述后制动后拉杆8相连,可跟随所述后制动后拉杆8的制动而进行相应的刹车作业。
29.进一步优选的实施方式中,所述手部制动组件包括手刹制动手柄10和手刹制动拉索11两个部分。所述手刹制动手柄10置于所述车体1作业方向前端的操作平台处,用于进行手部制动操控作业,具有预定的操作空间;所述手刹制动拉索11一端与所述手刹制动手柄10相连,另一端与所诉前后转接机构7相连,可跟随所述手刹制动手柄10的制动而进行相应的传动作业,进而完成相应的静止刹车作业。
30.进一步优选的实施方式中,所述后制动摇臂9通过钢板弹簧主片12与所述车体1相
连,用于在所述车体1运行过程中对所述车体1工作方向后端进行缓冲与制动连接,且所述钢板弹簧前卷耳为固定结构。
31.进一步优选的实施方式中,所述制动分配轴与所述前后转接机构7的旋转支点以封闭式轴承结构作为旋转介质,可减少摩擦力,增加旋转效果,提升操纵体验。
32.在上述车型制动系统结构的基础之上,本发明提出一种车型制动系统结构的前后转接机构7定位计算方法,具体步骤如下:
33.首先,在钢板弹簧前卷耳为固定结构的基础上,基本可以确定后桥调节拉杆已失去了作用。钢板弹簧主片12为固定主体,所述钢板弹簧主片12的中心点我们设定为板簧主片中心点a,在受重力g的压型下,所述板簧主片中心点a的运动轨迹其实不是平行后移运动的,根据模拟理论分析确定为圆弧性位移,并同时可以确定后制动摇臂9与板簧主片中心点同轨迹位移,从而找到了板簧主片中心点a的运动轨迹b。
34.接着,通过在运动轨迹b模拟做3~5个点,同时通过同线段平行找点法找到后制动摇臂9的同步位移点,以后制动摇臂9上的各点作为圆心,以制动相对距离为半径做圆。
35.随后,可以得出多个位移点的圆的重合点到后制动摇臂9的中心距离l不变,从而设定多个位移点为圆心所做圆的重合点到后制动摇臂9的中心距离为l1,
36.最后,从后制动摇臂9中心点向车体1工作方向前方水平延伸li距离处即为前后转接机构7的定点位置。
37.基于上述实施例所述,本发明的基本制动原理为所述制动踏板组合2驱动所述制动踏板拉杆4来带动所述制动分配轴组5,然后由所述后制动前拉杆6带动确定的所述前后转接机构7,通过制动拉力d的作用来带动所述前后转接机构7在后拉杆运动轨迹c上以逆时针方向位移,来实现后制动刹车效果。
38.所述手刹制动手柄10也是同样与所述制动踏板组合2一样带动所述制动分配轴组5来实现静止刹车的效果。
39.如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1