一种基于离体蝗虫后腿的微型跳跃机器人
1.本发明属于跳跃机器人技术领域,具体涉及一种基于离体蝗虫后腿的微型跳跃机器人。
背景技术:
2.根据“size-grain hypothesis”(尺寸—颗粒假说)可知,随着小型爬行机器人体积的缩小,它们面临的地面环境将会变得更加凹凸不平,在地面的介质上的通过性将显著降低。跳跃能够解决这一问题,借助跳跃,小型机器人能够轻松越过尺寸大于自身的障碍物,因此跳跃机器人被广泛应用于复杂地形,在太空探索和狭小空间救援等领域将有广阔应用。
3.目前,现有技术中存在以蝗虫为仿生原型的跳跃机器人,用扭簧代替蝗虫的半月板作为储能元件,用电机代替肌肉,驱动后腿运动,螺旋桨状尾翼可用于恢复机器人的直立状态和调节机器人的朝向,机器人的整体长度约为25cm,质量为46g。由于储能元件的特殊属性,要实现一定能量的输出,无法再继续减小机器人的尺寸和质量。
技术实现要素:
4.本发明的目的在于提供一种基于离体蝗虫后腿的微型跳跃机器人,具有体积小和质量轻的优点。
5.为了实现上述目的,本发明提供了一种基于离体蝗虫后腿的微型跳跃机器人,其包括:
6.机体;
7.用于执行跳跃动作的离体蝗虫后腿,成对设置在机体上;
8.用于辅助跳跃的驱动装置;
9.用于为驱动装置提供电能的电池;
10.其中,驱动装置包括摆臂、磁性体和电磁线圈;
11.摆臂转动设置在机体上,成对的两个离体蝗虫后腿对向连接在摆臂的相对两侧;磁性体安装在所摆臂上;电磁线圈具有紧邻设置的第一线圈和第二线圈,电池分别向第一线圈和第二线圈通电并产生相反方向磁场,对磁性体进行吸引或排斥,驱动摆臂进行往复摆动,以辅助离体蝗虫后腿完成跳跃动作。
12.根据本发明的另一种具体实施方式,第一线圈和第二线圈互相嵌套以形成内环线圈和外环线圈;第一线圈和第二线圈中的一个通电后产生排斥磁性体的力,以驱动磁性体带动摆臂进行顺时针转动;第一线圈和第二线圈中的另一个通电后产生吸引磁性体的力,以驱动磁性体带动摆臂进行逆时针转动。
13.根据本发明的另一种具体实施方式,电磁线圈以相对机体所在平面倾斜设置。
14.根据本发明的另一种具体实施方式,电磁线圈的倾角小于45
°
。
15.根据本发明的另一种具体实施方式,机体上还设有信号装置,信号装置用于接收
控制指令以向第一线圈或第二线圈输出控制信号。
16.根据本发明的另一种具体实施方式,信号装置包括控制板、处理器和接收天线,接收天线用于接收来自外部的无线信号,处理器用于将无线信号转换为控制指令并向第一线圈或第二线圈输出控制信号;控制板用于承载处理器和接收天线并进行电性连接。
17.根据本发明的另一种具体实施方式,离体蝗虫后腿为生物结构,其包括互相连接的腿节与胫节,腿节固定连接在摆臂上,胫节能够相对腿节转动。
18.根据本发明的另一种具体实施方式,腿节上设有用于控制胫节转动角度的刺激电极,利用所述信号装置向所述刺激电极发出刺激信号,通过刺激电极对腿节的伸肌和屈肌进行有序电刺激以驱动胫节的转动。
19.根据本发明的另一种具体实施方式,刺激电极具有作用于伸肌的第一电极和作用于屈肌的第二电极,第一电极和第二电极均设置在腿节上远离胫节的端部区域。刺激电极设置在腿节上远离胫节的端部区域。
20.根据本发明的另一种具体实施方式,摆臂呈t形,其具有柄端和对向的两个自由端,磁性体设置在柄端,两个自由端转动设置在机体上,离体蝗虫后腿与自由端相连接。
21.本发明具备以下有益效果:
22.本发明中,采用磁性驱动装置对离体蝗虫后腿进行辅助驱动,完成向前跳跃,具有结构紧凑和质量轻的优点,尤其适用于小体积(微型)下的跳跃动作。
23.本发明中,采用生物加非生物的结构组成形式,整体呈现为类似昆虫结构,可以通过两侧离体蝗虫后足施加电刺激起始时间的不同,使两侧离体蝗虫后腿发力存在微小的时间差,以实现跳跃机器人的转向跳跃。
24.下面结合附图对本发明作进一步的详细说明。
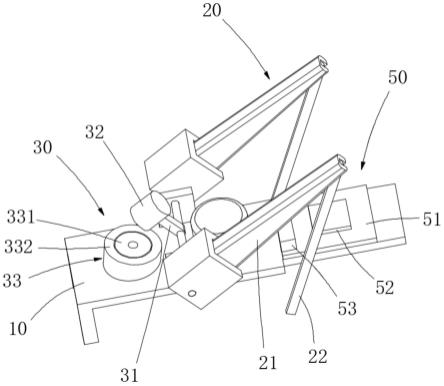
附图说明
25.图1是本发明微型跳跃机器人实施例1的结构示意图;
26.图2是本发明微型跳跃机器人实施例1中离体蝗虫后腿的示意图,其显示了刺激电极的植入位置。
具体实施方式
27.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
28.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不限于下面公开的具体实施例的限制。
29.实施例1
30.如图1所示,本实施例提供了一种基于离体蝗虫后腿的微型跳跃机器人,包括机体10和用于执行跳跃动作的离体蝗虫后腿20;离体蝗虫后腿20成对设置在机体10上,并且两个离体蝗虫后腿20位于机体10的左右两侧,通过两个离体蝗虫后腿20的动作实现机器人整体的向前跳跃。
31.具体的,离体蝗虫后腿20优选为生物结构,如图2所示,其包括互相连接的腿节21与胫节22,胫节22能够相对腿节21转动。本实施例中采用电刺激方式对胫节22的转动进行控制,腿节21上设有用于控制胫节22转动角度的刺激电极,通过刺激电极对腿节21的伸肌和屈肌进行有序电刺激可驱动其肌肉组织使得胫节22先收起再快速释放,以驱动胫节22的转动。
32.优选的,刺激电极设置在腿节21上远离胫节22的端部区域a;其中刺激电极具有作用于伸肌的第一电极a1和作用于屈肌的第二电极a2,第一电极a1和第二电极a2均设置在腿节21上远离胫节22的端部区域a。
33.如图2所示,第一电极a1的植入位置距离腿节21远离胫节22的左端的距离为3mm,第二电极a2的植入位置距离腿节21靠近胫节22的右端的距离为15mm,并且第二电极a2从腿节21的内侧进行植入,以实现肌肉组织的快速响应。
34.本实施例中,可以通过两侧离体蝗虫后足施加电刺激起始时间的不同,使两侧离体蝗虫后腿20发力存在微小的时间差,以实现跳跃机器人的转向跳跃。在外部干预条件下,例如设置其他的限位结构和/或角度调节结构,还可以对腿节21和机体10的夹角角度进行调节,以实现跳跃角度的改变。
35.再次参见图1,机体10上设有用于执行跳跃动作的驱动装置30,驱动装置30包括摆臂31、磁性体32和电磁线圈33。
36.摆臂31转动设置在机体10上,摆臂31优选呈t形,其具有柄端和对向的两个自由端,磁性体32设置在柄端,两个自由端均与机体10之间形成转动副配合,例如在机体10上设有转动座11,两个自由端均转动支撑在该转动座11上。其中,离体蝗虫后腿20与自由端相连接,具体是腿节21固定在自由端上。
37.相应的,为了更好地对离体蝗虫后腿20进行安装,可以在自由端设有用于和腿节21相配合的连接座23,以实现离体蝗虫后腿20的快速装配。
38.电磁线圈33具有紧邻设置的第一线圈331和第二线圈332,机体10上设有电池40,通过电池40分别向第一线圈331和第二线圈332通电并产生相反方向磁场,对磁性体32进行吸引或排斥,驱动摆臂31进行往复摆动,以辅助离体蝗虫后腿20完成跳跃动作。
39.进一步地,第一线圈331和第二线圈332互相嵌套以形成内环线圈和外环线圈;第一线圈331和第二线圈332中的一个通电后产生排斥磁性体32的力,以驱动磁性体32带动摆臂31进行顺时针转动;第一线圈331和第二线圈332中的另一个通电后产生吸引磁性体32的力,以驱动磁性体32带动摆臂31进行逆时针转动。
40.优选的,电磁线圈33以相对机体10所在平面倾斜设置,电磁线圈33的倾角小于45
°
,具体例如为15
°
,以便于更好地与磁性体32进行适配,从而更加快速反应并进行吸引或排斥动作。
41.继续参见图1,机体10上还设有信号装置50,电池40用于向信号装置50进行供电。通过信号装置50接收控制指令以向第一线圈331或第二线圈332输出控制信号;具体的,是利用信号装置50向刺激电极发出刺激信号,以实现对离体蝗虫后腿20的跳跃控制。
42.信号装置50包括控制板51、处理器52和接收天线53,接收天线53用于接收来自外部的无线信号,以便于实现远程控制;处理器52用于将无线信号转换为控制指令并向第一线圈331或第二线圈332输出控制信号;控制板51用于承载处理器52和接收天线53并进行电
性连接。
43.本实施例中,采用生物加非生物的结构组成形式,整体呈现为类似昆虫结构,采用磁性驱动装置辅助离体蝗虫后腿20进行驱动,以完成向前跳跃;通过两侧离体蝗虫后足施加电刺激起始时间的不同,使两侧离体蝗虫后腿20发力存在微小的时间差,以实现跳跃机器人的转向跳跃;整体结构具有结构紧凑和质量轻的优点,尤其适用于小体积(微型)下的跳跃动作。
44.虽然本发明以较佳实施例揭露如上,但并非用以限定本发明实施的范围。任何本领域的普通技术人员,在不脱离本发明的发明范围内,当可作些许的改进,即凡是依照本发明所做的同等改进,应为本发明的范围所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1