一种可自动跟随的电动滑板车的制作方法
1.本发明涉及电动滑板车技术领域,具体涉及一种可自动跟随的电动滑板车。
背景技术:
2.随着生活水平的快速发展,人们对于出行工具的要求也越来越高,电动滑板车作为新型的代步工具正迅速发展。与传统电动自行车相比,电动滑板车结构更简单、车轮小、轻巧简便,方便携带。目前市面上大多数电动滑板车都是单轮驱动,前后各一个轮子这种结构设计,由于本身轮胎小,减震能力弱,在拐弯过坎时,容易发生侧翻,安全性大大降低。此外大多数电动滑板车需要去到指定位置才能停放、拿取,亦或者中途不骑行时,需要去推行它,无法释放双手。
3.随着城市化进程的加快,大城市人口数量激增以及汽车保有量的日益提升,加剧了城市拥堵、环境污染等问题。为了缓解城市交通拥堵、提倡绿色出行,电动滑板车作为新兴的短距离代步工具,与传统电动自行车对比,更轻便、灵活、便于携带,能较好的满足人们短距离出行和公共交通接驳换乘等问题,同时也避免出现类似大量共享单车乱停乱放的现象。
4.然而目前市面上大多数电动滑板车都是单轮驱动,这种结构在加速、省电、轻巧等方面占据优势,但是在爬坡或者路面不平、过减速带、拐弯时容易发生侧翻,存在很大的安全隐患。此外,大多数滑板车没有自动跟随及避障功能,在停放或者骑行时,需要去到指定位置,在不想骑行或不适合骑行的场所,只能通过手推的方式来控制滑板车,给用户带来不便。
5.cn103171717b公开了一种前两轮避震式滑板车,包括车身、避震轮轴、踏板、车把、车把连接座、两前轮、后轮和后轮罩。车梁的前端焊接转筒、后端焊接后叉,避震轮轴包括半圆型材管、轮轴管、锁销、垫片、避震弹簧、避震罩、定位圈、轮轴管和轮轴,轮轴管穿入半圆型材管的对穿孔中,半圆型材管上套有垫片、避震弹簧和避震罩,再穿入转筒的塑料衬管中,然后在半圆型材管上套接定位圈,半圆型材管上端安装锁销,轮轴穿入轮轴管中,轮轴的两头各套接一前轮,并用两防滑螺母拧接,后叉上安装后轮,车梁上安装踏板,后轮罩安装于踏板的后端,车把连接座与车把的底部固定,车把连接座的锁接孔与安装于半圆型材管上的锁销锁接。
6.cn114157980a公开了一种基于uwb定位技术的自动跟随产品,包括跟随产品本体、遥控标签,所述跟随产品上至少设有移动基站控制器,车轮、舵机、驱动电机、电池,本发明的有益效果是:跟随产品与人直接通信、测距、定位、控制与跟踪,无需基站与外网,因此方便简洁,成本低,定位准确,避障灵敏,跟踪稳定,给人们的工作与生活带来便捷。
7.cn103171717b公开了一种前两轮避震式滑板车,包括车身、避震轮轴、踏板、车把、车把连接座、两前轮、后轮和后轮罩。该发明专利更多地描述了滑板车在结构上如何实现避震,没有提及其他功能。
8.cn114157980a公开了一种基于uwb定位技术的自动跟随产品,跟随产品与遥控标
签直接通信、测距、定位、控制与跟踪,无需基站与外网,因此方便简洁,成本低,定位准确,避障灵敏,跟踪稳定。该发明的测距系统主要是根据a,b两个基站与遥控标签进行通讯,计算三点的距离,间接算出标签相对于基站的距离以及信号入射的角度进而控制车的运动,通过上位机程序绘制遥控标签运动轨迹。该专利至少需要使用2个uwb基站和1个uwb标签,此外没有明确如果绘制运动轨迹以及如何进行跟随,遇到障碍物要如何处理。
技术实现要素:
9.有鉴于此,为了解决现有技术中的上述问题,本发明提出一种可自动跟随的电动滑板车,在结构上采用前两轮驱动,后面一个支撑轮,改善由于单轮驱动(前后各一轮)导致的一些平衡性、安全性问题,同时滑板车搭配uwb基站、标签以及激光雷达实现高精度跟随避障功能,同时uwb手环作为标签外,还可实现一键跟随、启动、停止、前进、后退、左右转向等基本功能控制。
10.本发明通过以下技术手段解决上述问题:
11.一种可自动跟随的电动滑板车,包括手环和电动滑板车本体;
12.所述手环与电动滑板车本体无线连接;
13.所述手环置于用户手腕,其上设置有一键跟随键、启动键、停止键、前进键、后退键和左右转向键;
14.所述电动滑板车本体包括基站、主控制器、正常滑板车壳体、车轮、电池、角度测量仪和激光雷达;
15.所述主控制器分别与基站、车轮、电池、角度测量仪和激光雷达电连接;
16.所述正常滑板车壳体包括底板、踏板、连杆和t杆,底板和踏板连接;底板与连杆连接,两个驱动轮之间采用连杆连接,t杆连接到连杆上;
17.所述主控制器和电池置于踏板下面的槽内;
18.所述车轮包括三个轮子,前面两个为驱动轮,后面一个为支撑轮;
19.所述角度测量仪置于连杆上,用于实时测量当前电动滑板车的偏转角度反馈给主控制器,以便主控制器控制电动滑板车;
20.所述基站用于接收手环传递的标签位置;
21.所述激光雷达用于实时扫描前方的路况信息;
22.在跟随模式下,主控制器实时接收基站传递的标签位置以及激光雷达扫描得到的空间点数据集信息,主控制器根据标签位置确定好目标位置,通过激光雷达的数据明确周围障碍物,绘制出到目标位置最优路径,实现避障跟随功能,不断实时接收基站以及激光雷达的数据动态地调整路径规划;
23.在普通用户骑行模式下,激光雷达会实时扫描前方的路况信息,在遇到障碍物之前,提醒用户前面有障碍物;
24.在电动滑板车静置时,用户通过手环与主控制器通讯,唤醒电动滑板车,手环实现一键跟随、启动、停止、前进、后退和左右转向功能控制,通过一键跟随将电动滑板车召唤到自己面前;通过启停、加减速、转弯操作将电动滑板车控制到指定的位置。
25.作为优选地,所述电动滑板车本体还包括显示屏和喇叭,显示屏和喇叭都与主控制器连接,显示屏置于t杆上端,激光雷达实时扫描前方的路况信息,在遇到障碍物之前,将
信息反馈到显示屏进行提醒,或者通过语音采用喇叭提醒前面有障碍物。
26.作为优选地,所述避障跟随功能由动态窗口算法实现,首先定义电动滑板车状态为位置、姿态和速度的集合,控制量为电动滑板车速度和转向指令,评价函数为运动轨迹越接近目标状态且越远离障碍物则值越小;已知条件为目标状态、当前状态和当前周围障碍物,则动态窗口算法描述为:任一时刻,在当前状态和电动滑板车性能约束下,采样生成多组控制量,并模拟出在这些控制量下电动滑板车的运动轨迹,计算评价函数,选择使其值最小的控制量驱动电动滑板车。
27.作为优选地,所述手环为uwb标签手环,所述基站为uwb基站。
28.作为优选地,所述手环与电动滑板车本体通过红外、蓝牙或wifi无线连接。
29.作为优选地,所述角度测量仪为编码器或拉线传感器。
30.作为优选地,两个驱动轮上都设置有驱动电机,主控制器对前面两个轮子分开进行控制。
31.作为优选地,所述t杆上设置有t杆收缩螺母,t杆收缩螺母实现t杆高度调节。
32.作为优选地,所述正常滑板车壳体还包括折叠开关,折叠开关位于t杆与连杆的连接处。
33.作为优选地,所述基站置于电动滑板车的t杆收缩螺母位置;所述激光雷达置于t杆的下端。
34.与现有技术相比,本发明的有益效果至少包括:
35.本发明前两轮驱动、后面一个支撑轮的结构设计提高滑板车的稳定性和安全性;采用uwb以及激光雷达实时测量自动识别、规划路径,有效规避障碍物,提高跟随的准确度。手环可实现一键跟随、启动、停止、前进、后退、左右转向等功能控制,远距离就可实现对车的控制,释放双手。骑行时遇到障碍物可以智能提醒,可折叠,便于携带。
附图说明
36.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
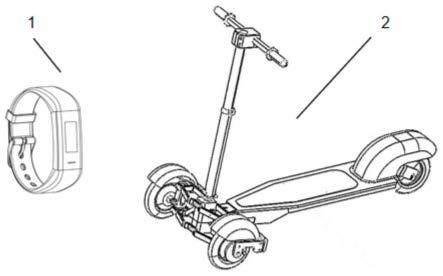
37.图1是本发明可自动跟随的电动滑板车的结构示意图;
38.图2是本发明电动滑板车本体的结构示意图;
39.图3是现有技术中单轮驱动的电动滑板车结构示意图;
40.附图标记说明:
41.1、uwb标签手环;2、电动滑板车本体;201、uwb基站;202、主控制器;203、正常滑板车壳体;204、车轮;205、电池;206、角度测量仪;207、激光雷达;2031、t杆;2032、t杆收缩螺母;2033、折叠开关;2034、连杆;2036、显示屏。
具体实施方式
42.为使本发明的上述目的、特征和优点能够更加明显易懂,下面将结合附图和具体的实施例对本发明的技术方案进行详细说明。需要指出的是,所描述的实施例仅仅是本发
明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
43.本发明旨在提出一种可自动跟随的电动滑板车,主要包括uwb标签手环1和电动滑板车本体2两大部分,如图1所示。
44.uwb标签手环1置于用户手腕,可与电动滑板车本体2通讯发送当前的位置信息,同时可与电动滑板车本体2通讯实现功能控制,如:一键跟随、启动、停止、前进、后退、左右转向等。
45.如图2所示,电动滑板车本体2包含uwb基站201、主控制器202、正常滑板车壳体203、车轮204、电池205、角度测量仪206和激光雷达207。
46.主控制器202分别与基站201、车轮204、电池205、角度测量仪206和激光雷达207电连接。
47.正常滑板车壳体203包括底板、踏板、连杆2034和t杆2031,底板和踏板连接;底板与连杆2034连接,t杆2031连接到连杆2034上。
48.主控制器202和电池205置于踏板下面的槽内,槽内四周采用密闭防水处理,同时踏板结构采用倒扣式设计,更能避免雨水进入。
49.主控制器202、滑板车壳体203、车轮204和电池205实现基本的电动滑板车功能。车轮204总共有三个轮子,前面两个为驱动轮,后面一个为支撑轮。两个驱动轮上都设置有驱动电机,主控制器202对前面两个轮子分开进行控制,实现启动、停止、加减速、转弯、自动跟随等功能。图3为单轮驱动的电动滑板车,中间竖着的t杆与下面的轮子是一体设计,用户在控制t杆稍微倾斜时,就会带动车轮倾斜,从而导致侧翻。而本发明前面两个驱动轮之间采用连杆2034连接,可灵活转动方向,t杆2031连接到两个驱动轮之间的连杆2034上,t杆2031有一定的活动角度,用户微微倾斜t杆2031时不会连带两车轮倾斜导致侧翻,提高了稳定性和安全性。
50.t杆2031上设置有t杆收缩螺母2032,uwb基站201置于电动滑板车的t杆收缩螺母2032位置,位置大约与人手垂直放下手腕高度相同,方便在自动跟随模式下实时接收用户手腕wb标签手环1发送的位置信息。t杆收缩螺母2032可以实现t杆高度调节,满足用户不同身高的需求。正常滑板车壳体203还包括折叠开关2033,折叠开关2033位于t杆2031与两个驱动轮之间连杆2034连接处,折叠后方便携带。
51.角度测量仪206置于两个驱动轮之间的连杆2034上,它的作用是实时测量当前车的偏转角度反馈给主控制器202,以便主控制器202更准确的控制电动滑板车。角度测量仪206为编码器或拉线传感器。
52.激光雷达207置于t杆2031的下端,实时扫描前方的路况信息。
53.在跟随模式下,主控制器202实时接收uwb基站201传递的标签位置(x,y坐标值)以及激光雷达207扫描得到的空间点数据集信息(三维坐标x,y,z),主控制器202根据这些位置坐标确定好目标位置(uwb标签手环,即用户),通过激光雷达207的数据明确周围障碍物,绘制出到目标位置最优路径,实现跟随,不断实时接收uwb基站201以及激光雷达207的数据动态地调整路径规划。
54.所述避障跟随功能可由动态窗口算法(dynamic window approach,dwa)实现,详细如下。首先定义小车状态为位置、姿态和速度的集合,控制量为小车速度和转向指令,评
价函数为运动轨迹越接近目标状态且越远离障碍物则值越小。已知条件为目标状态、当前状态和当前周围障碍物。则dwa算法可描述为,任一时刻,在当前状态和小车性能约束下,采样生成多组控制量,并模拟出在这些控制量下小车的运动轨迹,计算评价函数,选择使其值最小的控制量驱动小车。
55.电动滑板车本体2还包括显示屏2036和喇叭,显示屏2036和喇叭都与主控制器202连接。
56.在普通用户骑行模式下,激光雷达207会实时扫描前方的路况信息,在遇到障碍物之前,会将信息反馈到t杆2031上端的显示屏2036进行提醒,或者通过语音采用喇叭提醒前面有障碍物。
57.在电动滑板车静置时,用户可通过uwb标签手环1与电动滑板车的主控制器202通讯,唤醒电动滑板车,手环可实现一键跟随、启动、停止、前进、后退、左右转向等功能控制。通过一键跟随将滑板车召唤到自己面前,无需走动;通过启停、加减速、转弯等操作可将电动滑板车控制到指定的位置,实现释放双手。
58.本发明可自动跟随的电动滑板车采用3个轮子,使得平衡性及安全性更有保证。前面2个驱动轮,后面1个支撑轮,同时小车配备了激光雷达以及uwb基站(ultra wide band,超宽带技术,一种无线载波通信技术),可实现自动跟随及路径规划避障功能,uwb标签手环可实现一键跟随、启动、停止、前进、后退、左右转向等基本功能控制,该滑板车可作为普通电动滑板车使用,也可作为自动跟随小车,亦可折叠收起,便于携带,骑行时遇到障碍物可以智能提醒。
59.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1