一种永磁吸附式磁轮的制作方法
1.本发明涉及一种机械装置,尤其涉及一种永磁吸附式磁轮。
背景技术:
2.截至目前,国内外对于金属罐体容器表面爬壁机器人的研究比较多,常见的有负压吸附式爬壁机器人,通过在真空吸盘内产生真空负压,依靠吸盘内外的大气压差产生吸附力,其优点是吸附力大且稳定,并且吸附力不受墙面材料的限制,但是其要求吸盘与墙壁的接触面高度贴合,当壁面有裂缝、凹凸或者壁面异形时,容易造成真空吸盘漏气,使其吸附力下降,甚至使机器人从壁面剥落。鉴于以上缺陷,实有必要设计一种永磁吸附式磁轮。
技术实现要素:
3.本发明的目的在于提供一种永磁吸附式磁轮,该永磁吸附式磁轮吸附力强且可以调整,适合在平面、曲面以及凹凸不平等各类容器壁面工况下使用。
4.为解决上述技术问题,本发明的技术方案是:一种永磁吸附式磁轮,包括偏转机构、辅助支撑柱、磁轮机构、弹性机构,所述的辅助支撑柱活动设置于偏转机构一侧,所述的磁轮机构安装于偏转机构下端,所述弹性机构分别与磁轮机构和辅助支撑柱通过螺栓连接;
5.所述的磁轮机构还包括磁轮约束、第一环形轭铁、永磁铁、第二环形轭铁、法兰、伺服电机、连接螺栓,所述的磁轮约束、第一环形轭铁、永磁铁、第二环形轭铁、法兰沿偏转机构的轴线方向自左向右依次布置,所述的连接螺栓依次贯穿磁轮约束、第一环形轭铁、永磁铁、第二环形轭铁的主体,所述的连接螺栓与法兰通过螺纹相连,所述的伺服电机位于偏转机构的右侧且位于法兰的右侧,所述的伺服电机分别与偏转机构和法兰通过螺栓相连,所述的永磁铁沿厚度方向充磁,所述的第一环形轭铁和第二环形轭铁的材质为电工纯铁,所述第一环形轭铁、永磁铁、第二环形轭铁组成单个磁回路单元,所述的磁回路单元通过增加个数调节磁轮机构的吸附力,第一环形轭铁、永磁铁、第二环形轭铁组成一个完整的磁回路单元,当永磁铁沿厚度方向充磁后,被第一环形轭铁和第二环形轭铁约束的磁力线大部分穿过容器的壁面回到永磁铁中,只有很少的磁力线逃逸,永磁铁正下方的容器壁面磁感应强度明显高于第一环形轭铁、永磁铁、第二环形轭铁内部磁感应强度,从而保证磁能的利用率最大,当单个磁回路单元产生的吸附力满足不了负载要求时,可以通过扩展磁回路单元的方式形成阵列结构来增加吸附力,从而应对不同的工况要求。
6.本发明进一步的改进如下:
7.进一步的,所述第一环形轭铁、永磁铁、第二环形轭铁的直径相等。
8.进一步的,所述磁轮约束的材质为铝合金,所述磁轮约束的形状为圆台,所述磁轮约束底面直径不大于第一环形轭铁的直径。
9.进一步的,所述法兰的材质为铝合金,所述法兰的形状为圆台,所述法兰底面直径不大于第二环形轭铁的直径,磁轮约束与法兰均为铝合金材料,具有隔磁作用,一方面可防
止导磁性物体直接吸附到磁轮侧面不易取下,另一方面能进一步减少磁力线逃逸,提高吸附力,磁轮约束和法兰的形状为圆台形,最大的底面直径不大于第一环形轭铁的直径,能最大程度保证第一环形轭铁、永磁铁、第二环形轭铁组成的磁回路与容器避免接触,提高吸附力。
10.进一步的,所述连接螺栓数量为3件,沿磁轮约束的圆周方向等间距布置,等间距布置的连接螺栓起到平均载荷的作用,提高使用寿命。
11.进一步的,所述永磁铁的为钕铁硼永磁铁。
12.进一步的,所述的偏转机构还包括u型支架、转动螺钉、电机前盖,所述的转动螺钉数量为2件,对称布置于u型支架下端,所述的转动螺钉与u型支架间隙配合相连,所述的电机前盖位于u型支架内侧且位于伺服电机左侧,所述的电机前盖与转动螺钉螺纹相连且与伺服电机通过螺栓相连。
13.进一步的,所述的弹性机构还包括左固定块、右固定块、导杆、导套、弹簧,所述的左固定块位于辅助支撑柱下端,所述的左固定块与辅助支撑柱通过螺栓相连,所述的右固定块位于伺服电机下端,所述的右固定块与伺服电机通过螺栓相连,所述的导杆位于左固定块右侧,所述的导杆与左固定块螺纹相连,所述的导套位于右固定块左侧且位于导杆外侧,所述的导套与右固定块一体相连且与导杆间隙配合相连,所述的弹簧套装于导套和导杆的外侧,当多组磁轮机构在曲面行走时,偏转机构发生偏转,弹簧复位,导杆沿导套滑动来补偿磁轮机构沿转动螺钉偏转时的微小位移,使得永磁铁与容器壁面充分贴合,实现可靠行走,同时,当磁轮机构遇到凸起、焊渣等不平时,弹簧能起到阻尼作用,实现减震缓冲,提高行走的稳定性。
14.与现有技术相比,该永磁吸附式磁轮,工作时,该装置通常情况下四组一起使用,通过辅助支撑柱和偏转机构与机器人本体进行固定,当多组磁轮机构在圆弧形的容器壁面行走时,永磁铁与容器壁面产生磁力,磁轮机构受力沿转动螺钉偏转,使得永磁铁与容器壁面贴合,由第一环形轭铁、永磁铁、第二环形轭铁组成磁回路单元,当永磁铁沿厚度方向充磁后,被第一环形轭铁和第二环形轭铁约束的磁力线大部分穿过容器的壁面回到永磁铁中,且永磁铁正下方的容器壁面磁感应强度最大,从而实现磁轮机构与容器壁面的可靠贴合,伺服电机通电工作后能驱动磁轮机构转动,从而实现机器人的稳定可靠运动。该装置结构简单,采用厚度方向充磁的磁回路单元能提高磁能的利用率及吸附力,且吸附力可以调整,同时,通过偏转机构和弹性机构,使得磁轮机构能在曲面的容器壁面上稳定、可靠行走,从而满足不同的工况需要。
附图说明
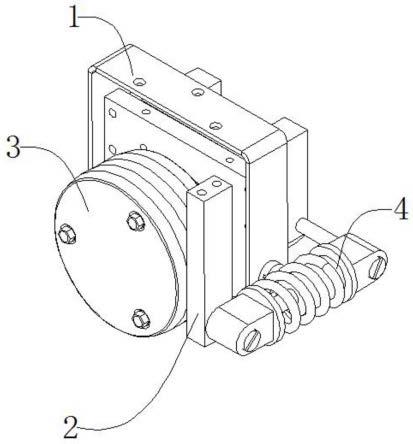
15.图1示出本发明三维图
16.图2示出本发明爆炸图
17.图3示出本发明偏转机构三维图
18.图4示出本发明弹性机构三维图
19.图5示出本发明单个磁回路单元磁感应强度分布图
20.图6示出本发明两个磁回路单元磁感应强度分布图
21.图中:偏转机构1、辅助支撑柱2、磁轮机构3、弹性机构4、u型支架101、转动螺钉
102、电机前盖103、磁轮约束301、第一环形轭铁302、永磁铁303、第二环形轭铁304、法兰305、伺服电机306、连接螺栓307、左固定块401、右固定块402、导杆403、导套404、弹簧405。
具体实施方式
22.如图1、图2所示,一种永磁吸附式磁轮,包括偏转机构1、辅助支撑柱2、磁轮机构3、弹性机构4,所述的辅助支撑柱2活动设置于偏转机构1一侧,所述的磁轮机构3安装于偏转机构1下端,所述弹性机构4分别与磁轮机构3和辅助支撑柱2通过螺栓连接,所述的磁轮机构3还包括磁轮约束301、第一环形轭铁302、永磁铁303、第二环形轭铁304、法兰305、伺服电机306、连接螺栓307,所述的磁轮约束301、第一环形轭铁302、永磁铁303、第二环形轭铁304、法兰305沿偏转机构1的轴线方向自左向右依次布置,所述的连接螺栓307依次贯穿磁轮约束301、第一环形轭铁302、永磁铁303、第二环形轭铁304的主体,所述的连接螺栓307与法兰305通过螺纹相连,所述的伺服电机306位于偏转机构1的右侧且位于法兰305的右侧,所述的伺服电机306分别与偏转机构1和法兰305通过螺栓相连,所述的永磁铁303沿厚度方向充磁,所述的第一环形轭铁302和第二环形轭铁304的材质为电工纯铁,所述第一环形轭铁302、永磁铁303、第二环形轭铁304组成单个磁回路单元,所述的磁回路单元通过增加个数调节磁轮机构3的吸附力,第一环形轭铁302、永磁铁303、第二环形轭铁304组成一个完整的磁回路单元,当永磁铁303沿厚度方向充磁后,被第一环形轭铁302和第二环形轭铁304约束的磁力线大部分穿过容器的壁面回到永磁铁303中,只有很少的磁力线逃逸,永磁铁303正下方的容器壁面磁感应强度明显高于第一环形轭铁302、永磁铁303、第二环形轭铁304内部磁感应强度,从而保证磁能的利用率最大,当单个磁回路单元产生的吸附力满足不了负载要求时,可以通过扩展磁回路单元的方式形成阵列结构来增加吸附力,从而应对不同的工况要求,所述第一环形轭铁302、永磁铁303、第二环形轭铁304的直径相等,所述磁轮约束301的材质为铝合金,所述磁轮约束301的形状为圆台,所述磁轮约束301的底面直径不大于第一环形轭铁302的直径,所述法兰305的材质为铝合金,所述法兰305的形状为圆台,所述法兰305的底面直径不大于第二环形轭铁304的直径,磁轮约束301与法兰305均为铝合金材料,具有隔磁作用,一方面可防止导磁性物体直接吸附到磁轮侧面不易取下,另一方面能进一步减少磁力线逃逸,提高吸附力,磁轮约束301和法兰305的形状为圆台形,最大的底面直径不大于第一环形轭铁302的直径,能最大程度保证第一环形轭铁302、永磁铁303、第二环形轭铁304组成的磁回路与容器避免接触,提高吸附力,所述连接螺栓307数量为3件,沿磁轮约束301的圆周方向等间距布置,等间距布置的连接螺栓307起到平均载荷的作用,提高使用寿命,所述永磁铁303的为钕铁硼永磁铁,钕铁硼永磁铁具有极强的磁稳定性,提高了使用安全性。
23.如图3所示,所述的偏转机构1还包括u型支架101、转动螺钉102、电机前盖103,所述的转动螺钉102数量为2件,对称布置于u型支架101下端,所述的转动螺钉102与u型支架101间隙配合相连,所述的电机前盖103位于u型支架101内侧且位于伺服电机306左侧,所述的电机前盖103与转动螺钉102螺纹相连且与伺服电机306通过螺栓相连,由于转动螺钉102与u型支架101为间隙配合相连,与电机前盖103固定连接,因此,当受到力的作用且u型支架101固定时,与电机前盖103固连的伺服电机306能沿转动螺钉偏转。
24.如图4所示,所述的弹性机构4还包括左固定块401、右固定块402、导杆403、导套
404、弹簧405,所述的左固定块401位于辅助支撑柱2下端,所述的左固定块401与辅助支撑柱2通过螺栓相连,所述的右固定块402位于伺服电机306下端,所述的右固定块402与伺服电机306通过螺栓相连,所述的导杆403位于左固定块401右侧,所述的导杆403与左固定块401螺纹相连,所述的导套404位于右固定块402左侧且位于导杆403外侧,所述的导套404与右固定块402一体相连且与导杆403间隙配合相连,所述的弹簧405套装于导套404和导杆403的外侧,当多组磁轮机构3在曲面行走时,偏转机构1发生偏转,弹簧405复位,导杆403沿导套404滑动来补偿磁轮机构3沿转动螺钉102偏转时的微小位移,使得永磁铁303与容器壁面充分贴合,实现可靠行走,同时,当磁轮机构3遇到凸起、焊渣等不平时,弹簧405能起到阻尼作用,实现减震缓冲,提高行走的稳定性。
25.如图5所示,当由第一环形轭铁302、永磁铁303、第二环形轭铁304组成的单个磁回路单元在容器壁面吸附时,可以看出永磁铁303正下方的壁面磁感应强度高于永磁铁303与第一环形轭铁302和第二环形轭铁304,且达到了2.4t。
26.如图6所示,当两个由第一环形轭铁302、永磁铁303、第二环形轭铁304组成的磁回路单元构成阵列时,可以看出容器壁面磁感应强度到了2.7t。
27.该永磁吸附式磁轮,工作时,该装置通常情况下四组一起使用,通过辅助支撑柱2和偏转机构1与机器人本体进行固定,当多组磁轮机构3在圆弧形的容器壁面行走时,永磁铁303与容器壁面产生磁力,磁轮机构3受力沿转动螺钉102偏转,使得永磁铁303与容器壁面贴合,由第一环形轭铁302、永磁铁303、第二环形轭铁304组成磁回路单元,当永磁铁303沿厚度方向充磁后,被第一环形轭铁302和第二环形轭铁304约束的磁力线大部分穿过容器的壁面回到永磁铁303中,且永磁铁303正下方的容器壁面磁感应强度最大,从而实现磁轮机构3与容器壁面的可靠贴合,伺服电机306通电工作后能驱动磁轮机构3转动,从而实现机器人的稳定可靠运动。该装置结构简单,采用厚度方向充磁的磁回路单元能提高磁能的利用率及吸附力,且吸附力可以调整,同时,通过偏转机构和弹性机构,使得磁轮机构能在曲面的容器壁面上稳定、可靠行走,从而满足不同的工况需要。
28.本发明不局限于上述具体的实施方式,本领域的普通技术人员从上述构思出发,不经过创造性的劳动,所做出的种种变换,均落在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1