履带式双旋翼爬壁机器人
本发明涉及机器人,特别涉及一种爬壁机器人,属于先进制造与自动化领域。
背景技术:
1、爬壁机器人可以携带多种传感器,携带多种执行机构去代替人类在高楼、桥梁、大坝等建筑物的墙面完成各种不同的任务,例如清洗外墙,检测建筑表面质量、进行反恐侦察等。
2、爬壁机器人按照吸附原理可以分为:磁力吸附型,仿生吸附型,负压吸附型,吸盘吸附型四种。其中,负压吸附型机器人能适应多种壁面,但是一般的负压吸附型爬壁机器人有翻越障碍物能力差、运动时容易失稳、移动速度慢等特点。故一般的负压吸附型爬壁机器人难以进行壁面缺陷检测、金属加工、灾害救援和危险品检测等多种任务。
技术实现思路
1、有鉴于此,本发明提供一种履带式双旋翼爬壁机器人,能稳定吸附在不同建筑物壁面上,具有一定的越障能力,且不容易发生滑移和倾覆。
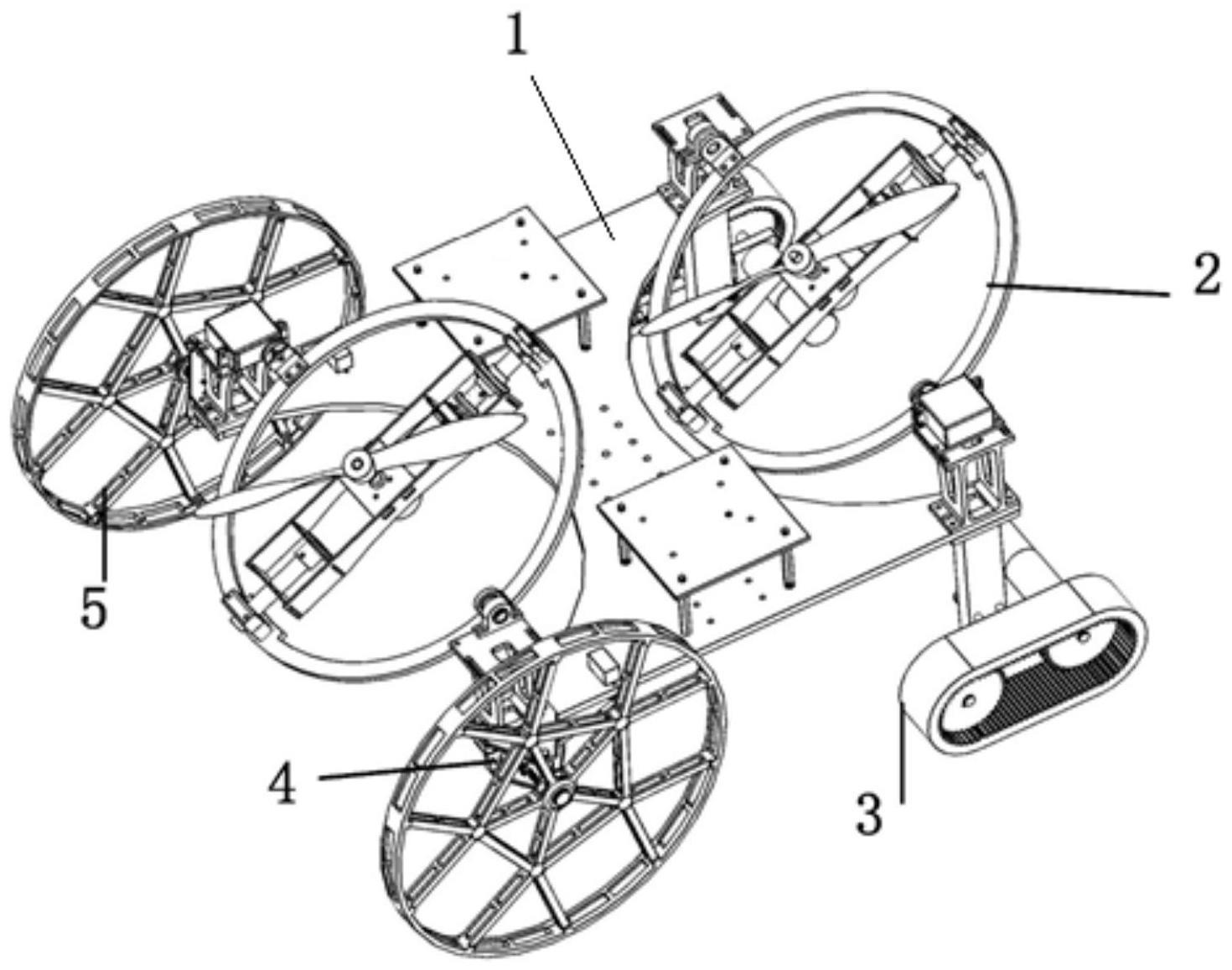
2、本发明的技术方案是:一种履带式双旋翼爬壁机器人,包括:机器人底板、两自由度反推力吸附单元、前行驶单元和后行驶单元;所述后行驶单元为履带行驶单元;
3、两个所述履带行驶单元固定在所述机器人底板后部的左右两侧;两个所述前行驶单元固定在机器人底板前部的左右两侧;在所述机器人底板纵向中轴线的前后两端各设置一个两自由度反推力吸附单元;所述两自由度反推力吸附单元通过螺旋桨的转动产生朝向接触面的吸附力,所述两自由度反推力吸附单元能够进行俯仰角度和翻转角度的调整。
4、作为本发明的一种优选方式,所述履带行驶单元包括:履带纵架、履带横架、主动齿轮、从动齿轮、履带和履带驱动电机;
5、所述履带行驶单元通过履带纵架与机器人底板相连;所述履带横架通过履带俯仰轴与履带纵架相连,所述履带俯仰轴的轴向沿该爬壁机器人的横向;所述履带横架能够绕履带俯仰轴的轴向转动;
6、所述履带横架的后端固接履带驱动电机,所述履带驱动电机的动力输出端与所述主动齿轮连接;所述履带环绕在主动齿轮和从动齿轮上形成带传动机构;
7、支撑在所述支撑在履带横架前端的从动齿轮轴与从动齿轮相连。
8、作为本发明的一种优选方式,所述履带纵架上,所述履带横架绕履带俯仰轴转动方向的两侧各固定一个限位螺栓,用于限制所述履带横架的转动区间。
9、作为本发明的一种优选方式,所述前行驶单元包括转向机构和车轮;所述车轮通过转向机构与所述机器人底板相连。
10、作为本发明的一种优选方式,所述转向机构包括:上转向固定架、转向轴、转向块、转向拉杆、下转向固定架、转向舵机臂和转向舵机;
11、所述转向舵机固定在机器人底板上,所述上转向固定架的一端与机器人底板连接,另一端设置有用于支撑转向轴的圆孔;所述下转向固定架的一端与机器人底板连接,另一端设置有用于支撑转向轴的圆孔;所述转向轴的上下两端分别通过卡簧固定在上转向固定架和下转向固定架的圆孔内;
12、所述转向块套装在转向轴的外部,能够绕转向轴的轴线转动;
13、所述转向舵机的动力输出端与转向舵机臂相连,所述转向拉杆一端与转向舵机臂铰接,另一端与转向块铰接;
14、所述转向块的一端延伸有圆柱用于和所述车轮相连。
15、作为本发明的一种优选方式,所述转向拉杆包括两端的螺套为中间的螺柱,所述螺柱的两端分别与两个螺套螺纹连接,两个螺套分别与转向舵机臂和转向块铰接;通过所述螺柱与所述螺套螺纹连接的长度能够调节所述转向拉杆的长度。
16、作为本发明的一种优选方式,所述车轮和所述履带行驶单元的履带表面粘附有工业摩擦传送带。
17、作为本发明的一种优选方式,所述前行驶单元为履带行驶单元。
18、作为本发明的一种优选方式,所述两自由度反推力吸附单元包括:吸附单元支架、俯仰关节轴、旋翼盘主体、俯仰舵机、翻滚关节固定架、翻滚关节固定轴、翻滚舵机、桨电机、螺旋桨和翻滚架主体;
19、所述旋翼盘主体为圆形框架,其外圆周的横向两相对端中,一端与所述俯仰关节轴相连,所述俯仰关节轴通过轴承支撑在吸附单元支架上;另一端通过俯仰舵机联轴器与俯仰舵机舵盘相连,所述俯仰舵机固定在该端的吸附单元支架上,用于驱动所述俯仰舵机舵盘转动,进而带动所述旋翼盘主体进行俯仰角度的调整;
20、所述旋翼盘主体内部沿纵向设置有翻滚架主体,所述翻滚舵机包括舵机本体和作为动力输出端的翻滚舵机舵盘,所述舵机本体固定在翻滚架主体上,所述翻滚舵机舵盘通过翻滚关节固定轴与所述翻滚关节固定架固连;
21、所述翻滚架主体的一端通过轴承支撑在翻滚关节固定轴上;另一端通过翻滚关节轴塞与翻滚关节滚动轴相连;所述翻滚关节滚动轴通过轴承支撑在翻滚架轴承架b上;
22、所述翻滚舵机舵盘固定,舵机本体旋转运动,进而带动翻滚架主体翻转,实现翻转角度的调整;
23、所述桨电机固定在翻滚架主体上,所述桨电机的动力输出端与螺旋桨相连,用于驱动螺旋桨旋转。
24、作为本发明的一种优选方式,当该爬壁机器人进行地面到壁面的转换时:
25、当所述车轮触碰到墙面时,前方的两自由度反推力吸附单元调整其俯仰角,并提高所述螺旋桨的的转速,使所述车轮抬起;当安装在所述机器人底板的九轴传感器检测到机器人底板俯仰角变化后,所述履带行驶单元以设定速度滚动,保证车轮在墙面上抬升的同时,履带行驶单元不断地靠近墙面;最终使得履带行驶单元与车轮都接触到竖直壁面,由此完成从地面到竖直壁面的转换。
26、有益效果:
27、(1)本发明的履带式双旋翼爬壁机器人,与常规爬壁机器人的轮式行驶系相比,采用履带行驶系,增加了机器人与接触面的接触面积,增加了机器人的附着力和摩擦力。
28、(2)本发明的履带式双旋翼爬壁机器人中,履带行驶单元中设置有履带俯仰轴,当遇到凸起障碍物时,履带行驶单元能够绕履带俯仰轴转动,由此保证履带始终与障碍物的法线垂直,增加了机器人的牵引力,提高了越障性能。
29、(3)履带行驶单元中设置有用于限制履带行驶单元转动的限位螺栓,由此限制履带行驶单元的转动区间,防止履带与接触面的接触面积过小,产生滑移现象;由此保证履带行驶单元与接触面的接触面积,进而保证了机器人行驶时有足够的附着力。
30、(4)本发明的履带式双旋翼爬壁机器人中,用工业摩擦传送带作为机器人履带及车轮与接触面的接触材料,这让机器人可以在多种壁面条件下行驶。
31、(5)本发明的履带式双旋翼爬壁机器人中设置了两自由度反推力吸附单元,两自由度反推力吸附单元在攀爬墙壁时,会调整反推力在机器人俯仰方向和翻滚方向的角度,从而在机器人的前进方向、侧向、垂直于墙面方向均提供反推力,保证机器人行驶时的稳定性,灵活性。
32、(6)本发明中的转向机构整体结构刚性大,保证底盘结构平稳。
技术特征:
1.履带式双旋翼爬壁机器人,其特征在于,包括:机器人底板(1)、两自由度反推力吸附单元(2)、前行驶单元和后行驶单元;所述后行驶单元为履带行驶单元(3);
2.如权利要求1所述的履带式双旋翼爬壁机器人,其特征在于,所述履带行驶单元(3)包括:履带纵架(301)、履带横架(302)、主动齿轮(303)、从动齿轮(305)、履带(307)和履带驱动电机(309);
3.如权利要求2所述的履带式双旋翼爬壁机器人,其特征在于,所述履带纵架(301)上,所述履带横架(302)绕履带俯仰轴(3011)转动方向的两侧各固定一个限位螺栓(308),用于限制所述履带横架(302)的转动区间。
4.如权利要求1或2或3所述的履带式双旋翼爬壁机器人,其特征在于,所述前行驶单元包括转向机构(4)和车轮(5);所述车轮(5)通过转向机构(4)与所述机器人底板(1)相连。
5.如权利要求4所述的履带式双旋翼爬壁机器人,其特征在于,所述转向机构(4)包括:上转向固定架(401)、转向轴(402)、转向块(403)、转向拉杆(404)、下转向固定架(405)、转向舵机臂(406)和转向舵机(407);
6.如权利要求5所述的履带式双旋翼爬壁机器人,其特征在于,所述转向拉杆(404)包括两端的螺套为中间的螺柱,所述螺柱的两端分别与两个螺套螺纹连接,两个螺套分别与转向舵机臂(406)和转向块(403)铰接;通过所述螺柱与所述螺套螺纹连接的长度能够调节所述转向拉杆(404)的长度。
7.如权利要求4所述的履带式双旋翼爬壁机器人,其特征在于,所述车轮(5)和所述履带行驶单元(3)的履带表面粘附有工业摩擦传送带。
8.如权利要求1或2或3所述的履带式双旋翼爬壁机器人,其特征在于,所述前行驶单元为履带行驶单元。
9.如权利要求1所述的履带式双旋翼爬壁机器人,其特征在于,所述两自由度反推力吸附单元(2)包括:吸附单元支架(201)、俯仰关节轴(202)、旋翼盘主体(203)、俯仰舵机(206)、翻滚关节固定架(207)、翻滚关节固定轴(208)、翻滚舵机(211)、桨电机(212)、螺旋桨(213)和翻滚架主体(214);
10.如权利要4所述的履带式双旋翼爬壁机器人,其特征在于,当该爬壁机器人进行地面到壁面的转换时:
技术总结
发明提供一种履带式双旋翼爬壁机器人,能稳定吸附在不同建筑物壁面上,具有一定的越障能力,且不容易发生滑移和倾覆。该爬壁机器人包括:机器人底板、两自由度反推力吸附单元、前行驶单元和后行驶单元;所述后行驶单元为履带行驶单元;本发明的履带式双旋翼爬壁机器人,与常规爬壁机器人的轮式行驶系相比,采用履带行驶系,增加了机器人与接触面的接触面积,增加了机器人的附着力和摩擦力。
技术研发人员:高学山,黎铭康,张清芳,卫伊,赵鹏,邓瑞
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!