爬壁机器人用履带及爬壁机器人的制作方法
1.本实用新型涉及爬壁机器人技术领域,具体而言,涉及一种爬壁机器人用履带及爬壁机器人。
背景技术:
2.水冷壁是锅炉本体的重要组成部件,锅炉运行时水冷壁受热面存在受热变形、高温腐蚀、积灰结焦等问题,长期运行后老化问题会越来越突出,安全性下降。因此锅炉水冷壁定期检修一直是锅炉检修的一项重要工作。水冷壁受热面检查是一项高危环境作业,检查区域大、时间长,对检修人员要求高。设计能够在水冷壁表面自由可靠行走的机器装置,实现提高水冷壁检测的便捷性是亟待解决的问题。
3.在现有技术中,也出现了可以适用于铁质壁面的爬壁机器人,其具体原理是通过在履带上设置多个磁铁,从而让履带可以吸附在铁质壁面行走。为了使得爬壁机器人可以通过履带更好的吸附在铁质壁面上,磁铁的磁性越大应当是越好的。但是在磁铁与铁质壁面吸附的一瞬间,两者相撞的能力是较大的,很容易造成磁铁碎裂。
技术实现要素:
4.本实用新型的主要目的在于提供一种爬壁机器人用履带及爬壁机器人,以解决现有技术中爬壁机器人用履带在使用时磁铁容易碎裂的问题。
5.为了实现上述目的,根据本实用新型的一个方面,提供了一种爬壁机器人用履带,包括履带本体和多个磁体,多个磁体沿履带本体的长度方向依次设置,在履带本体上设置有多个挡块,多个挡块也沿履带本体的长度方向依次设置,并且相邻的两个磁体之间设置有一个挡块,挡块在履带本体上的厚度大于磁体在履带本体上的厚度。
6.在一个实施方式中,多个磁体在履带本体上呈多排设置,相邻的两个挡块之间设置有多个沿履带本体的宽度方向设置的磁体。
7.在一个实施方式中,多个磁体在履带本体上呈两排设置,相邻的两个挡块之间设置有两个沿履带本体的宽度方向设置的磁体。
8.在一个实施方式中,位于相邻的两个挡块之间的两个磁体呈异性相吸排列,位于每个挡块两侧的两个磁体也呈异性相吸排列。
9.在一个实施方式中,在履带本体上的位于相邻的两个挡块之间的部位设置有安装部,安装部用于安装磁体。
10.在一个实施方式中,安装部为开设在履带本体上的安装孔。
11.在一个实施方式中,磁体通过连接件与安装部相连。
12.在一个实施方式中,履带本体由柔性材料制成,履带本体的内部设置有钢丝绳芯。
13.在一个实施方式中,挡块在履带本体上的厚度大于磁体在履带本体上的厚度至少0.5mm。
14.为了实现上述目的,根据本实用新型的另一个方面,提供了一种爬壁机器人,包括
爬壁机器人用履带,爬壁机器人用履带为上述的爬壁机器人用履带。
15.应用本实用新型的技术方案,由于相邻的两个磁体之间设置有一个挡块,可以避免履带在运动的过程中因为压到一些凸起变形而让相邻两个磁体碰撞损坏。此外,由于挡块在履带本体上的厚度大于磁体在履带本体上的厚度,相当于每次是让挡块与铁质壁面接触,避免磁体因为与铁质壁面吸附一瞬间的冲击导致磁体碎裂。本实用新型的技术方案可以极大的提升爬壁机器人用履带的使用寿命。
16.除了上面所描述的目的、特征和优点之外,本实用新型还有其它的目的、特征和优点。下面将参照图,对本实用新型作进一步详细的说明。
附图说明
17.构成本实用新型的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
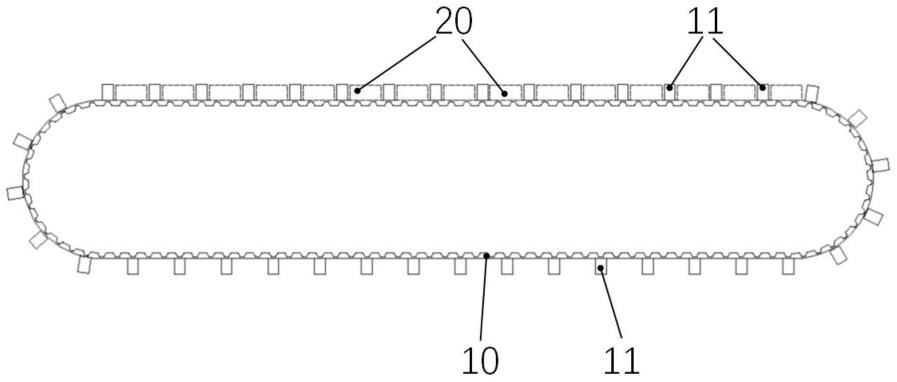
18.图1示出了根据本实用新型的爬壁机器人用履带的实施例的主视结构示意图;以及
19.图2示出了图1的爬壁机器人用履带的俯视结构示意图及其局部放大结构示意图。
20.其中,上述附图包括以下附图标记:
21.10、履带本体;11、挡块;20、磁体。
具体实施方式
22.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本实用新型。
23.为了使本技术领域的人员更好地理解本实用新型方案,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分的实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本实用新型保护的范围。
24.需要说明的是,本实用新型的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的术语在适当情况下可以互换,以便这里描述的本实用新型的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
25.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
26.图1和图2示出了本实用新型的爬壁机器人用履带的实施方式,该爬壁机器人用履带包括履带本体10和多个磁体20,多个磁体20沿履带本体10的长度方向依次设置。在履带
本体10上设置有多个挡块11,多个挡块11也沿履带本体10的长度方向依次设置,并且相邻的两个磁体20之间设置有一个挡块11,挡块11在履带本体10上的厚度大于磁体20在履带本体10上的厚度。
27.应用本实用新型的技术方案,由于相邻的两个磁体20之间设置有一个挡块11,可以避免履带在运动的过程中因为压到一些凸起变形而让相邻两个磁体20碰撞损坏。此外,由于挡块11在履带本体10上的厚度大于磁体20在履带本体10上的厚度,相当于每次是让挡块11与铁质壁面接触,避免磁体20因为与铁质壁面吸附一瞬间的冲击导致磁体20碎裂。本实用新型的技术方案可以极大的提升爬壁机器人用履带的使用寿命。
28.在本实用新型的技术方案中,相邻的两个磁体20之间设置有一个挡块11的保护范围,也包括将一个挡块11割裂为两个或者更多个相邻子挡块11的实施方式,凡以挡块11来间隔磁体20并且保护磁体20的实施方式都应属于本实用新型的保护范围。
29.在本实施例的技术方案中,多个磁体20在履带本体10上呈两排设置,相邻的两个挡块11之间设置有两个沿履带本体10的宽度方向设置的磁体20。该结构可以采用两个更短的磁体20来替代一个长的磁体20,减少磁体20的长度,减少磁体20破损的可能性,并且减少磁体20碎裂后的替换成本。
30.作为图中未示出的可选的实施方式,多个磁体20在履带本体10上也可以呈更多排设置,相邻的两个挡块11之间设置有多个沿履带本体10的宽度方向设置的磁体20。
31.如图2所示,作为一种优选的实施方式,位于相邻的两个挡块11之间的两个磁体20呈异性相吸排列,位于每个挡块11两侧的两个磁体20也呈异性相吸排列。这样的设置,可以让磁体20在履带本体10磁场相同,形成一个闭环,增强多个磁体20联系的整体性。作为一种具体的实施方式,磁体20由充磁方向分为两种,a类型磁体20充磁方向为ns,b类型磁体20充磁方向为sn,磁体20安装方式排布为abab
……
,这样可减小磁体20的体积以及更好的防止磁体20碎裂,同时由于排布的巧妙性,磁体20的磁场可形成闭环,吸附装置吸附力较大,一定程度减少资源的浪费。
32.优选的,在履带本体10上的位于相邻的两个挡块11之间的部位设置有安装部,安装部用于安装磁体20。在使用时,磁体20通过安装部安装在履带本体10上。更为优选的,磁体20通过连接件与安装部相连。作为一种可选的实施方式,在本实施例的技术方案中,安装部为开设在履带本体10上的安装孔,磁体20通过螺钉或者螺栓与安装孔相连。具体的,在同步带两个挡块11中间规律的打四个菱形孔,用于安装两个磁体20。
33.可选的,磁体20为钕铁硼磁铁,整体为长方体形状,磁铁上下面均打台阶孔,中间为通孔,孔大小按照螺栓和螺母的直径来确定,保证安装之后磁铁的平整性。
34.优选的,履带本体10由柔性材料制成,符合履带运动的形变要求,履带本体10的内部设置有钢丝绳芯,以保证履带本体10的使用强度。这样,保证了履带的抗拉强度,不易变形
35.更具实验,挡块11在履带本体10上的厚度大于磁体20在履带本体10上的厚度至少0.5mm。这样,让挡块11更好的缓冲磁体20吸附时的冲击力,又保证吸附力强,很好的解决爬壁机器人用履带重量重,结构复杂,不可靠的问题。优选的,挡块11间距为磁体20宽度的约1.2倍。
36.在本实施例的技术方案中采用钕铁硼磁铁,作为其他可选的实施方式,也可以采
用钐钴磁体、铁氧体磁铁、铝镍钴磁铁或者铁铬钴磁铁。
37.本实用新型提供了一种爬壁机器人,包括上述的爬壁机器人用履带。采用上述的爬壁机器人用履带,可以提高爬壁机器人在铁质壁面行走的稳定性。
38.从上述内容可知,本实用新型的技术方案,简单实用,且可靠性高,它由带钢丝绳芯的同步带做履带,钕铁硼磁铁在履带上做一定规则的排布,使得磁铁的磁场做闭环设计,整体吸附力可满足机器人在锅炉水冷壁面的吸附及爬行,也可用于其他爬壁机器人在金属壁面的吸附,爬壁机器人磁吸附装置的优点是结构简单,吸附可靠,安装方便。其中,尤其是用于爬壁机器人中有显著的效果。
39.除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本实用新型的范围。同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
40.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
41.在本实用新型的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本实用新型保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
42.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1