一种四轮驱动履带式机器人底盘的制作方法
1.本实用新型涉及机器人设备技术领域,特别涉及一种四轮驱动履带式机器人底盘。
背景技术:
2.目前,我国由于退耕还林工程的实施使全国经济林面积迅速扩大。经济林地地形有其特点,其较耕地地形复杂,凹凸不平,一般的农用机械底盘越障能力不足,很难适应林地这样的复杂地形。
3.然而我国内目前也有一些机械设备,但其底盘占地面积大、爬坡能力差、转弯半径大,且履带轮都是采用双轮驱动,不适用于不同的地形特征,无法在地内穿行,无法满足林地多变的立地条件问题,因此,本申请提供了一种四轮驱动履带式机器人底盘来满足需求。
技术实现要素:
4.本申请的目的在于提供一种四轮驱动履带式机器人底盘,实现了在底盘本体上装设有四组履带轮,且履带轮上各自由液压马达进行独立驱动,适用与不同的地形高度,且该底盘本体便于进行拆卸工作,使工作人员定期对履带轮内部的泥土进行清洗。
5.为实现上述目的,本申请提供如下技术方案:一种四轮驱动履带式机器人底盘,包括底盘本体,所述底盘本体的顶端固定安装有安装板,且底盘本体与安装板之间固定安装有加强筋,所述安装板上开设有两组装配孔,所述安装板的两端开设有安装孔,且安装孔的内部插设有插块,所述插块固定安装在固定块上,且固定块固定安装在液压马达上,所述液压马达的输出端传动连接有齿盘。
6.优选的,所述齿盘上套设有履带轮,所述履带轮的内壁上设置有卡齿,且齿盘与卡齿相啮合。
7.优选的,所述安装孔设置有四组,且安装孔的口径尺寸大于插块的宽度尺寸。
8.优选的,所述底盘本体的内部滑动安装有限位块,且限位块的一端铰接有套杆,所述套杆上套设有螺纹杆,且螺纹杆活动插设在底盘本体上。
9.优选的,所述套杆的内部设置有内螺纹,且套杆与螺纹杆组成螺旋转动式结构。
10.优选的,所述安装孔上开设有卡槽,且限位块的底端贴合在卡槽上。
11.综上,本实用新型的技术效果和优点:
12.本实用新型结构合理,当需要对底盘本体进行安装的时候,将底盘本体上的安装板贴合在机械设备的底端,在安装板上开设有装配孔,通过螺栓插设在装配孔内,便于将底盘本体整体固定安装在机械设备的底端,在底盘本体上开设有安装孔,将固定块上的插块插设在安装孔内,然后在对底盘本体上的螺纹杆进行转动,通过螺纹杆的转动使套杆向下进行移动,套杆向下移动推动限位块贴合在卡槽的内,从而便于将插块固定在安装孔内部,通过液压马达的运作使齿盘进行转动,齿盘的转动便于履带轮进行转动,便于履带轮进行爬坡作业。
附图说明
13.为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅是本申请的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
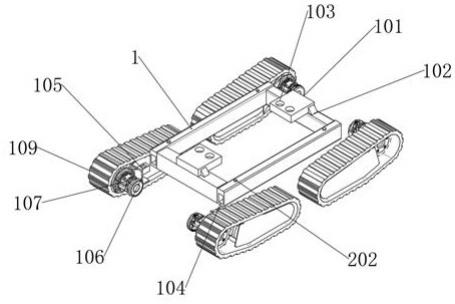
14.图1为底座本体立体结构示意图;
15.图2为底座本体正视结构示意图;
16.图3为底座俯视结构示意图;
17.图4为底座本体局部剖面结构示意图。
18.图中:1、底盘本体;101、安装板;102、加强筋;103、装配孔;104、安装孔;105、插块;106、固定块;107、液压马达;108、齿盘;109、履带轮;2、限位块;201、套杆;202、螺纹杆;203、卡槽。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.实施例:参考图1-4所示的一种四轮驱动履带式机器人底盘,包括底盘本体1,底盘本体1的顶端固定安装有安装板101,且底盘本体1与安装板101之间固定安装有加强筋102,安装板101上开设有两组装配孔103,安装板101的两端开设有安装孔104,且安装孔104的内部插设有插块105,插块105固定安装在固定块106上,且固定块106固定安装在液压马达107上,液压马达107的输出端传动连接有齿盘108。
21.作为本实施例中的一种优选的实施方式,齿盘108上套设有履带轮109,履带轮109的内壁上设置有卡齿,且齿盘108与卡齿相啮合,通过液压马达107的运作使齿盘108进行转动,齿盘108的转动带动履带轮109进行转动。
22.在本实施例中,安装孔104设置有四组,且安装孔104的口径尺寸大于插块105的宽度尺寸,便于插块105插设在安装孔104的内进行固定安装。
23.作为本实施例中的一种实施方式,底盘本体1的内部滑动安装有限位块2,且限位块2的一端铰接有套杆201,套杆201上套设有螺纹杆202,且螺纹杆202活动插设在底盘本体1上,通过套杆201进行推动使限位块2上下进行移动。
24.在本实施例中,套杆201的内部设置有内螺纹,且套杆201与螺纹杆202组成螺旋转动式结构,螺纹杆202的底端插设在套杆201内,通过螺纹杆202的转动使套杆201进行移动。
25.在本实施例中,安装孔104上开设有卡槽203,且限位块2的底端贴合在卡槽203上,通过套杆201的推动使限位块2的底端贴合在卡槽203内,从而便于对插块105的位置进行固定。
26.本实用工作原理:当需要对底盘本体1进行安装的时候,将底盘本体1上的安装板101贴合在机械设备的底端,在安装板101上开设有装配孔103,通过螺栓插设在装配孔103内,便于将底盘本体1整体固定安装在机械设备的底端,在底盘本体1上开设有安装孔104,
将固定块106上的插块105插设在安装孔104内,然后在对底盘本体1上的螺纹杆202进行转动,通过螺纹杆202的转动使套杆201向下进行移动,套杆201向下移动推动限位块2贴合在卡槽203的内,从而便于将插块105固定在安装孔104内部,通过液压马达107的运作使齿盘108进行转动,齿盘108的转动便于履带轮109进行转动,便于履带轮109进行爬坡作业。
27.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种四轮驱动履带式机器人底盘,包括底盘本体(1),其特征在于:所述底盘本体(1)的顶端固定安装有安装板(101),且底盘本体(1)与安装板(101)之间固定安装有加强筋(102),所述安装板(101)上开设有两组装配孔(103),所述安装板(101)的两端开设有安装孔(104),且安装孔(104)的内部插设有插块(105),所述插块(105)固定安装在固定块(106)上,且固定块(106)固定安装在液压马达(107)上,所述液压马达(107)的输出端传动连接有齿盘(108)。2.根据权利要求1所述的一种四轮驱动履带式机器人底盘,其特征在于:所述齿盘(108)上套设有履带轮(109),所述履带轮(109)的内壁上设置有卡齿,且齿盘(108)与卡齿相啮合。3.根据权利要求1所述的一种四轮驱动履带式机器人底盘,其特征在于:所述安装孔(104)设置有四组,且安装孔(104)的口径尺寸大于插块(105)的宽度尺寸。4.根据权利要求1所述的一种四轮驱动履带式机器人底盘,其特征在于:所述底盘本体(1)的内部滑动安装有限位块(2),且限位块(2)的一端铰接有套杆(201),所述套杆(201)上套设有螺纹杆(202),且螺纹杆(202)活动插设在底盘本体(1)上。5.根据权利要求4所述的一种四轮驱动履带式机器人底盘,其特征在于:所述套杆(201)的内部设置有内螺纹,且套杆(201)与螺纹杆(202)组成螺旋转动式结构。6.根据权利要求1所述的一种四轮驱动履带式机器人底盘,其特征在于:所述安装孔(104)上开设有卡槽(203),且限位块(2)的底端贴合在卡槽(203)上。
技术总结
本实用新型公开了一种四轮驱动履带式机器人底盘,涉及到机器人设备技术领域,包括底盘本体,所述底盘本体的顶端固定安装有安装板,且底盘本体与安装板之间固定安装有加强筋,所述安装板上开设有两组装配孔,所述安装板的两端开设有安装孔,且安装孔的内部插设有插块,所述插块固定安装在固定块上,且固定块固定安装在液压马达上。本实用新型结构合理,实现了在底盘本体上装设有四组履带轮,且履带轮上各自由液压马达进行独立驱动,适用与不同的地形高度,且该底盘本体便于进行拆卸工作,使工作人员定期对履带轮内部的泥土进行清洗。使工作人员定期对履带轮内部的泥土进行清洗。使工作人员定期对履带轮内部的泥土进行清洗。
技术研发人员:董海昌 张强玉 王盛利 尹宏林 袁明昊 董春山 沈维林 徐朝荣
受保护的技术使用者:安徽海马特救援科技有限公司
技术研发日:2022.06.02
技术公布日:2022/11/7
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1