一种可变形六足球形机器人
本技术涉及探测机器人,具体为一种可变形的六足球形机器人。
背景技术:
1、随着科学技术的不断推进,机器人被广泛运用到了更多的领域,在面对一些未知环境需要探测时,出于对人身安全等因素的考虑,需要探测机器人来代替人类完成一些工作。探测机器人主要以仿生机器人为主,比如常见的六足,八足机器人等。传统的六足机器人虽然可以实现在复杂道路上运动行走,但是在面对危险时,由于自身结构的原因,机器人整体缺少防护,容易被突然的外物碰撞,导致其受损乃至瘫痪。而球形机器人的出现,则有效避免了此类问题。球形机器人以其结构能均匀受力的优点开始被广泛应用。国内对于球形机器人的研究主要在它的控制算法上,在结构上的研究比较少。
2、本实用新型结合两类机器人的优点,提出了一种用于复杂崎岖环境下探测的可变形六足球形机器人。它既能在崎岖环境下依靠腿来行走,也可以在平坦路面上,滚动前进。而且通过18个独立的舵机控制关节,可以简化控制流程,有效避免了核心结构被损坏,而导致的机器人半瘫痪。18个舵机分开控制,即便是当几个舵机被损坏后,机器人仍然具有部分的运动能力,完成探测任务。
技术实现思路
1、针对现有探测机器人技术的不足,本实用新型的目的在于提供一种可变形的六足球形机器人。
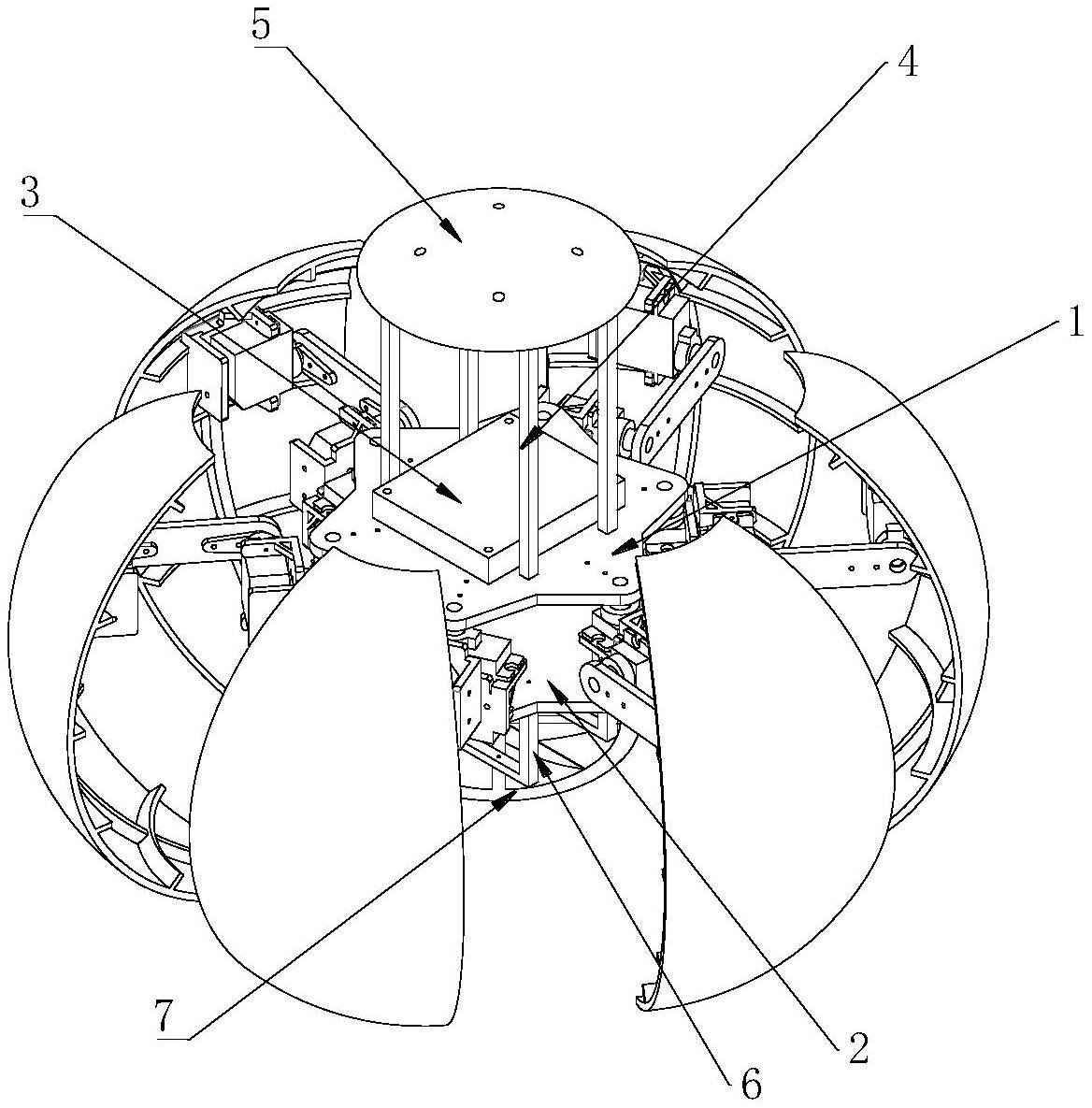
2、为了实现上述目的,本实用新型提供如下技术方案:一种可变形六足球形机器人其特征在于,包括躯干、底壳和腿部结构,底壳安装于躯干的下两侧,腿部结构关于躯干呈中心对称、圆周排列。所述躯干包括上底板、下底板、舵机控制板;其中上底板与下底板为正六边形状结构,且上下之间构成一个空间,舵机控制板是一个长方体结构,安装在上底板的上方,用以连接控制舵机。所述底壳包括上底壳支撑、上底壳、下底壳支撑、下底壳;其中上底壳支撑向上连接上底壳,向下连接上底板,下底壳支撑向下连接下底壳,向上连接下底板,均通过螺栓连接。底壳作为固定件,在机器人闭合时,与腿部结构组成一个完整的球体,在机器人的滚动过程中起辅助作用。所述腿部结构包括基关节舵机、股关节舵机、胫关节舵机、十字舵机支架、连接臂、支撑球壳;其中基关节舵机与股关节舵机分别用螺栓固定在十字舵机支架的两端,基关节舵机与股关节舵机朝向呈90度角。
3、优选的,所述上底板的底面安装有舵机摆臂,舵机摆臂上带有螺纹孔,与基关节舵机转轴上的螺纹相配合。所述下底板上带有底板连接孔,用来和十字舵机支架连接。
4、优选的,所述十字舵机支架包括前舵机架和后舵机架;所述前舵机架和后舵机架均包括舵机架主板,舵机架底板,舵机架侧臂;前舵机架和后舵机架通过舵机架主板上的主板连接孔进行连接;舵机架主板、舵机架底板和舵机架侧臂构成一个半包围的空间,用以安放舵机。舵机架底板上带有底板连接孔,用以连接躯干的下底板;舵机架侧臂上带有舵机定位孔,舵机通过螺钉和舵机定位孔固定在十字舵机支架上。十字舵机支架近似为一个十字轴,连接起基关节舵机和股关节舵机,舵机的转动,可以实现腿部结构在躯干所在平面和垂直面内转动。
5、优选的,所述连接臂包括连接板和舵机摆臂,连接板与舵机摆臂通过销钉固定连接;舵机摆臂对称放置,舵机摆臂上带有螺纹孔,分别与股关节舵机和胫关节舵机的转轴上的螺纹相配合。连接臂相当于机器人的大腿,一侧连接股关节舵机,另一侧连接胫关节舵机,连接臂绕股关节舵机转动,支撑球壳绕连接臂转动。
6、优选的,所述支撑球壳包括球壳和胫关节舵机架。胫关节舵机架与球壳固定在一起,胫关节舵机通过螺钉和舵机定位孔固定在胫关节舵机架上。
7、本实用新型提供了一种可变形六足球形机器人,具备以下有益效果:
8、该可变形六足球形机器人,在探测过程中,如果遇到路况不好时,可以通过舵机控制的6条腿来行走,在程序控制下,球体展开,利用三角步态的理论,6条腿分为两组,通过两组基关节舵机的交替转动,实现机器人的行走。当在平坦路面时,可以将6条腿收起,与底壳组成一个球体。通过支撑球壳的间断顺序开合,实现机器人的主动滚动前进。在探测途中,遇到陡峭斜坡时,球体闭合,从高处自由滚落,到达平稳位置后,球体会再度展开,继续通过腿的行走执行探测任务。
技术特征:
1.一种可变形六足球形机器人,其特征在于:包括躯干、底壳和腿部结构,底壳安装于躯干的下两侧,腿部结构关于躯干呈中心对称、圆周排列;所述躯干包括上底板(1)、下底板(2)、舵机控制板(3);其中上底板(1)与下底板(2)为正六边形状结构,且上下之间构成一个空间,舵机控制板(3)是一个长方体结构,安装在上底板的上方,用以连接控制舵机;所述底壳包括上底壳支撑(4)、上底壳(5)、下底壳支撑(6)、下底壳(7);其中上底壳支撑(4)向上连接上底壳(5),向下连接上底板(1),下底壳支撑(6)向下连接下底壳(7),向上连接下底板(2),均通过螺栓连接;底壳作为固定件,在机器人闭合时,与腿部结构组成一个完整的球体,在机器人的滚动过程中起辅助作用;所述腿部结构包括基关节舵机(8)、股关节舵机(9)、胫关节舵机(10)、十字舵机支架(11)、连接臂(12)、支撑球壳(13);其中基关节舵机(8)与股关节舵机(9),分别用螺栓固定在十字舵机支架(11)的两端,基关节舵机(8)与股关节舵机(9)朝向呈90度角。
2.根据权利要求1所述的一种可变形六足球形机器人,其特征在于:所述上底板(1)的底面安装有舵机摆臂(22),舵机摆臂(22)上带有螺纹孔,与基关节舵机(8)转轴上的螺纹相配合;所述下底板(2)上带有底板连接孔(18),用来和十字舵机支架(11)连接。
3.根据权利要求1所述的一种可变形六足球形机器人,其特征在于:所述十字舵机支架(11)包括前舵机架(14)和后舵机架(15);所述前舵机架(14)和后舵机架(15)均包括舵机架主板(24),舵机架底板(16),舵机架侧臂(17);前舵机架(14)和后舵机架(15)通过舵机架主板(24)上的主板连接孔(23)进行连接;舵机架主板(24)、舵机架底板(16)、舵机架侧臂(17)构成一个半包围的空间,用以安放舵机;舵机架底板(16)上带有底板连接孔(18),用以连接躯干的下底板(2);舵机架侧臂(17)上带有舵机定位孔(19),舵机通过螺钉和舵机定位孔(19)固定在十字舵机支架(11)上;十字舵机支架(11)近似为一个十字轴,连接起基关节舵机(8)和股关节舵机(9),舵机的转动,可以实现腿部结构在躯干所在平面和垂直面内转动。
4.根据权利要求1所述的一种可变形六足球形机器人,其特征在于:所述连接臂(12)包括连接板(21)和舵机摆臂(22),连接板(21)与舵机摆臂(22)通过销钉固定连接;舵机摆臂(22)对称放置,舵机摆臂(22)上带有螺纹孔,分别与股关节舵机(9)和胫关节舵机(10)的转轴上的螺纹相配合;连接臂(12)相当于机器人的大腿,一侧连接股关节舵机(9),另一侧连接胫关节舵机(10),连接臂(12)绕股关节舵机(9)转动,支撑球壳(13)绕连接臂(12)转动。
5.根据权利要求1所述的一种可变形六足球形机器人,其特征在于:所述支撑球壳(13)包括球壳(20)和胫关节舵机架(25);胫关节舵机架(25)与球壳(20)固定在一起,胫关节舵机(10)通过螺钉和舵机定位孔(19)固定在胫关节舵机架(25)上。
技术总结
本技术公开了一种可变形六足球形机器人,包括躯干、底壳和腿部结构,所述的躯干分为上底板、下底板和舵机控制板,所述底壳分为上底壳、下底壳、上底壳支撑和下底壳支撑,所述腿部结构包括基关节舵机,股关节舵机,胫关节舵机,十字舵机支架,连接臂,支撑球壳;股关节舵机和胫关节舵机转动配合,实现球体的展开与闭合;基关节舵机配合支撑球壳,通过三角步态实现机器人前进和后退;当球体闭合时,可以从高处向下自由滚动;在平坦路面上,通过支撑球壳的间断顺序开合,实现机器人的主动滚动前进;当在崎岖路面时,则可以利用支撑球壳作为腿进行行走。
技术研发人员:李东霖,朱永强,高明明,郭强,刘昊,吴兵,吴文锦
受保护的技术使用者:青岛理工大学
技术研发日:20220628
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!