一种可平地、楼梯两用的移动底座的制作方法
1.本实用新型涉及机器人技术领域,具体为一种可平地、楼梯两用的移动底座。
背景技术:
2.机器人是自动执行工作的机器装置,包括一切模拟人类行为或思想与模拟其他生物的机械(如机器狗,机器猫等),狭义上对机器人的定义还有很多分类法及争议,有些计算机程序甚至也被称为机器人,在当代工业中,机器人指能自动运行任务的人造机器设备,用以取代或协助人类工作,一般会是机电设备,由计算机程序或是电子电路控制。
3.如申请号cn202020627004.3的实用新型公开了一种机器人用移动底座,该机器人用移动底座通过设置第一转动杆,履带,电机,第四转动杆和转动轮,电机的转动带动转动轮进行转动,转动轮转动带动第一从动轮进行转动,第一从动轮带动第二从动轮进行转动,第二从动轮转动可以带动第二转动杆进行转动,即可以使履带进行转动,履带的转动可以带动第一转动杆进行转动,即可以进行移动,可以使机器人更加方便的进行移动,但类似于上述文件中的移动底座仅能在平地的路段进行移动作业,当遇到台阶或楼梯等建筑结构时,在跨越障碍或是攀爬的性能上受制于结构设置,会受这些建筑结构的阻拦,在移动灵活性上还需要进一步优化。
4.于是,有鉴于此,针对现有的结构及缺失予以研究改良,提出一种可平地、楼梯两用的移动底座。
技术实现要素:
5.本实用新型的目的在于提供一种可平地、楼梯两用的移动底座,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种可平地、楼梯两用的移动底座,包括底盘调节组和辅助轮毂,所述底盘调节组的左侧固定连接有左支撑减震组,且底盘调节组的右侧固定连接有右支撑减震组,所述右支撑减震组的底部固定连接有辅助梁架组,所述左支撑减震组的底部安装有动力轮组,所述辅助轮毂固定连接于动力轮组的表面,所述辅助轮毂包括连接轮毂、微型气缸、弹簧支撑柱、轮架和网格橡胶件,所述连接轮毂的底部安装有微型气缸,且微型气缸的底部安装有弹簧支撑柱,所述弹簧支撑柱的底部安装有轮架,且轮架的底部嵌套有网格橡胶件。
7.进一步的,所述底盘调节组包括中央梁架、调节柱和辅助支架,所述中央梁架的左右两侧安装有调节柱,且调节柱的上下两侧安装有辅助支架。
8.进一步的,所述左支撑减震组包括横向连接件、支撑桩、承压架和减震架,所述横向连接件的底部安装有支撑桩,且支撑桩的底部安装有承压架,所述承压架的左右两侧安装有减震架。
9.进一步的,所述辅助梁架组包括悬挂梁、电磁轨道、电磁调节桩、滑动控制件、液压桩和防滑桩,所述悬挂梁的底部安装有电磁轨道,且电磁轨道的右端表面连接有电磁调节
桩,所述电磁轨道的右端表面连接有滑动控制件,且滑动控制件的底部安装有液压桩,所述液压桩的底部安装有防滑桩。
10.进一步的,所述动力轮组包括连接柱、转向轴、控制电机和动力轮盘,所述连接柱的底部安装有转向轴,且转向轴的底部连接安装有控制电机,所述控制电机的底部与动力轮盘圆心中轴相连接。
11.进一步的,所述左支撑减震组和右支撑减震组的结构相同,且左支撑减震组和右支撑减震组均以底盘调节组的垂直中轴线为对称轴左右分别对称设置。
12.进一步的,所述动力轮组以底盘调节组的垂直中轴线为对称轴左右对称设置,且辅助轮毂以底盘调节组的圆心环形阵列分布于动力轮盘的表面。
13.本实用新型提供了一种可平地、楼梯两用的移动底座,具备以下有益效果:常规的机器人移动底座只适用于地面移动,在遇到障碍时,其移动装置会受到影响,为了能够提高移动装置的机动性,通过动力轮组和辅助轮毂的协作使得移动装置具有可以攀爬阶梯的性能,同时利用辅助梁架组在遇到移动装置无法直接跨越的沟壑时,可以进行短距离的架设结构进行横跨沟壑的机动性,为了辅助右支撑减震组顶部的辅助梁架组,通过底盘调节组可以有效调节整个移动装置的长度,以便于更好的越过沟壑等非平地的障碍结构。
14.1、本实用新型,为了有效提供攀爬楼梯道的性能,通过在动力轮盘表面环形阵列安装的连接轮毂,可以对依次接触到阶梯的接触面的那一组连接轮毂进行径向收缩形成缺口结构,以便于嵌合阶梯的形状,使得动力轮盘带动表面的连接轮毂进行转动时具有攀爬能力。
15.2、本实用新型,而当移动装置遇到沟壑或是较宽的地面裂缝以助于无法正常通过时,通过辅助梁架组在水平方向上进行伸缩调节,其中滑动控制件使液压桩沿着电磁轨道在水平方向上移动到沟壑对面进行预支撑,随后利用底盘调节组的协作将右支撑减震组、动力轮组和辅助轮毂平移到沟壑对面,在通过底盘调节组将另一端的左支撑减震组、动力轮组和辅助轮毂进行伸缩平移,达到跨越沟壑的作用。
16.3、本实用新型,而底盘调节组、左支撑减震组和右支撑减震组有效的强化了整个移动装置的结构的抗压性与减震性,同时也起到了对与整个移动装置相连接的机器人的保护,配合辅助轮毂的结构设置能够最大化缓解移动装置从高处垂落时产生的冲击,提高整个装置的结构安全性。
附图说明
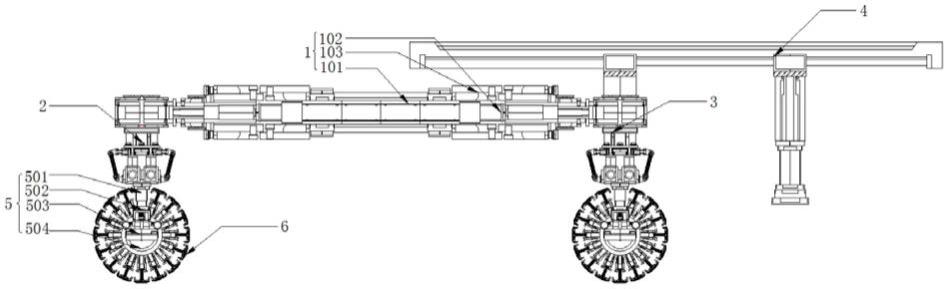
17.图1为本实用新型一种可平地、楼梯两用的移动底座的支架本体侧视结构示意图;
18.图2为本实用新型一种可平地、楼梯两用的移动底座的左支撑减震组结构示意图;
19.图3为本实用新型一种可平地、楼梯两用的移动底座的辅助梁架组结构示意图;
20.图4为本实用新型一种可平地、楼梯两用的移动底座的辅助轮毂结构示意图;
21.图5为本实用新型一种可平地、楼梯两用的移动底座的网格橡胶件立体结构示意图。
22.图中:1、底盘调节组;101、中央梁架;102、调节柱;103、辅助支架;2、左支撑减震组;201、横向连接件;202、支撑桩;203、承压架;204、减震架;3、右支撑减震组;4、辅助梁架组;401、悬挂梁;402、电磁轨道;403、电磁调节桩;404、滑动控制件;405、液压桩;406、防滑
桩;5、动力轮组;501、连接柱;502、转向轴;503、控制电机;504、动力轮盘;6、辅助轮毂;601、连接轮毂;602、微型气缸;603、弹簧支撑柱;604、轮架;605、网格橡胶件。
具体实施方式
23.下面结合附图和实施例对本实用新型的实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不能用来限制本实用新型的范围。
24.如图1至图5所示,一种可平地、楼梯两用的移动底座,包括底盘调节组1和辅助轮毂6,底盘调节组1的左侧固定连接有左支撑减震组2,且底盘调节组1的右侧固定连接有右支撑减震组3,右支撑减震组3的底部固定连接有辅助梁架组4,左支撑减震组2的底部安装有动力轮组5,辅助轮毂6固定连接于动力轮组5的表面,底盘调节组1包括中央梁架101、调节柱102和辅助支架103,中央梁架101的左右两侧安装有调节柱102,且调节柱102的上下两侧安装有辅助支架103,左支撑减震组2包括横向连接件201、支撑桩202、承压架203和减震架204,横向连接件201的底部安装有支撑桩202,且支撑桩202的底部安装有承压架203,承压架203的左右两侧安装有减震架204,左支撑减震组2和右支撑减震组3的结构相同,且左支撑减震组2和右支撑减震组3均以底盘调节组1的垂直中轴线为对称轴左右分别对称设置,其中中央梁架101的左右两侧安装的调节柱102,可以在水平方向上进行左右伸缩调节,用以调整整个底盘调节组1的长度结构,利用横向连接件201将整个左支撑减震组2固定在底盘调节组1的侧边,通过支撑桩202和承压架203将底部的动力轮组5和辅助轮毂6与底盘调节组1和辅助轮毂6进行进一步连接固定,而承压架203的左右两侧安装的减震架204提供了一定程度上的减震作用,同时左支撑减震组2与右支撑减震组3配合与动力轮组5的结构组合使得底盘调节组1离地高度有所提高,可以直接越过部分高度的障碍物而不需要转向绕行。
25.如图1至图3所示,辅助梁架组4包括悬挂梁401、电磁轨道402、电磁调节桩403、滑动控制件404、液压桩405和防滑桩406,悬挂梁401的底部安装有电磁轨道402,且电磁轨道402的右端表面连接有电磁调节桩403,电磁轨道402的右端表面连接有滑动控制件404,且滑动控制件404的底部安装有液压桩405,液压桩405的底部安装有防滑桩406,其中电磁调节桩403的底部固定安于横向连接件201的顶部,电磁调节桩403可以使悬挂梁401与电磁轨道402在水平方向上进行左右平移,而滑动控制件404带动液压桩405与底部的防滑桩406沿着电磁轨道402的表面在水平方向上进行左右平移,液压桩405可以在垂直方向上进行升降,以带动防滑桩406进行上下位移。
26.如图1至图4所示,动力轮组5包括连接柱501、转向轴502、控制电机503和动力轮盘504,连接柱501的底部安装有转向轴502,且转向轴502的底部连接安装有控制电机503,控制电机503的底部与动力轮盘504圆心中轴相连接,辅助轮毂6包括连接轮毂601、微型气缸602、弹簧支撑柱603、轮架604和网格橡胶件605,连接轮毂601的底部安装有微型气缸602,且微型气缸602的底部安装有弹簧支撑柱603,弹簧支撑柱603的底部安装有轮架604,且轮架604的底部嵌套有网格橡胶件605,动力轮组5以底盘调节组1的垂直中轴线为对称轴左右对称设置,且辅助轮毂6以底盘调节组1的圆心环形阵列分布于动力轮盘504的表面,其中连接柱501提供了动力轮组5连接左支撑减震组2与右支撑减震组3的结构支撑,而转向轴502提供了整个动力轮组5在在水平方向上进行360
°
的转动性能,极大提高了移动时的灵活转
向性,利用控制电机503的控制可以调整动力轮盘504的转动速度,用以调整整个装置的移动速度,由于辅助轮毂6环绕于动力轮盘504的表面,当动力轮盘504转动时可以带动辅助轮毂6围绕动力轮盘504的圆形进行同步转动,使得每一组辅助轮毂6都可以依次接触到地面以提供连续性的支撑,与连接轮毂601相连接的微型气缸602提供径向的支撑助理,而弹簧支撑柱603则在轮架604和网格橡胶件605接触到障碍物时具有一定程度的伸缩性,减少辅助轮毂6在转动时接触到障碍物出现碰撞弹跳,从而使整个移动装置出现上下颠簸的情况,以此结构使得整个移动装置具有了可攀爬楼梯的性能。
27.综上,如图1至图5所示,该可平地、楼梯两用的移动底座,使用时,首先整个装置在平地上进行移动时,通过转向轴502底部的控制电机503来控制动力轮盘504的转速,以达到不同的移动速度,其中通过支撑桩202和承压架203将底部的动力轮组5和辅助轮毂6与底盘调节组1和辅助轮毂6进行进一步连接固定,而承压架203的左右两侧安装的减震架204提供了一定程度上的减震作用,同时左支撑减震组2与右支撑减震组3配合与动力轮组5的结构组合使得底盘调节组1离地高度有所提高,可以直接越过部分高度的障碍物而不需要转向绕行,由于辅助轮毂6环绕于动力轮盘504的表面,当动力轮盘504转动时可以带动辅助轮毂6围绕动力轮盘504的圆心进行同步围绕转动,使得每一组辅助轮毂6都可以依次接触到地面以提供连续性的支撑,形成如同轮胎一般的结构,而轮架604底部的网格橡胶件605由于其网格结构,既减轻了重量的同时还能提供足够的抓地力,避免出现移动时打滑的问题;
28.当移动装置遇到楼梯时,其中最先接触到楼梯台阶表面的那一组辅助轮毂6中的轮架604和网格橡胶件605会在碰撞冲击挤压的过程中使弹簧支撑柱603进行径向收缩,使得整个围绕动力轮盘504固定安装的数组辅助轮毂6“圆盘”出现一个“缺口”,而此“缺口”会在动力轮盘504转动下进行位移,使得其他的未收缩的辅助轮毂6与收缩的辅助轮毂6形成一个卡扣固定住阶梯的表面,由于动力轮盘504进行快速转动,而“缺口”也是会随着辅助轮毂6的依次递进而形成循环出现,进而带动整个一种装置可以有着足够的抓地力进而攀爬阶梯;
29.当遇到整个移动装置无法直接越过的沟壑时,利用电磁调节桩403将悬挂梁401与电磁轨道402在水平方向上进行平移伸出,同时将滑动控制件404带动液压桩405与底部的防滑桩406沿着电磁轨道402的表面在水平方向上进行平移,最后使液压桩405越过沟壑,在沟壑的另一边停止移动,此时液压桩405可以进行垂直方向上进行调整,使防滑桩406能够接触到地面,完成液压桩405对整个移动装置的支撑,接着中央梁架101的左右两侧安装的调节柱102,会在水平方向上进行左右伸缩调节,调整整个底盘调节组1的长度结构,同时启动动力轮组5带动辅助轮毂6进行转动,而此时由于电磁调节桩403的底部固定安于横向连接件201的顶部,会带动右支撑减震组3与动力轮组5在水平方向沿着电磁轨道402向沟壑另一边进行移动,此过程如同架桥的方式,当底盘调节组1一端已经平稳落地到达沟壑另一边时,继续重复上一步骤可以使得底盘调节组1的另一端以同样的方式跨过沟壑。
30.本实用新型的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本实用新型限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本实用新型的原理和实际应用,并且使本领域的普通技术人员能够理解本实用新型从而设计适于特定用途的带有各种修改的各种实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1