一种矿用前后双电机四驱铰接重型车辆控制方法与流程
本发明属于矿用属于煤矿运输设备,具体涉及一种矿用前后双电机四驱铰接重型车辆控制方法。
背景技术:
1、矿用重载铰接运输车辆是井下移动运输设备之一。随着新能源技术的持续推广,依靠电机作为驱动技术的重型运载车辆已经得到不断发展。
2、许多新能源车运输车辆采用单电机加前后桥驱技术或分布式四轮边驱动技术。采用单电机作为驱动系统时,由于电机功率大造成电机尺寸大,同时大功率电机发热给散热又带来了新的问题。采用分布式四轮边驱动时,电机分散布置于轮胎边,单台电机驱动功率小,但由于同步控制和差速策略的偏差导致寄生功率过大,对不同电机间的同步控制和差速控制又提出高的要求。
3、目前在车辆控制方面,多采用通过压力传感器判断空载、轻载和重载情况,然后根据负载情况确定给定转矩。如何在不通过压力传感器来判断车辆的负载情况,以及如何针对不同的负载情况采用不同的控制策略是亟待解决的问题。
技术实现思路
1、本发明克服现有技术存在的不足,所要解决的技术问题为:提供一种矿用前后双电机四驱铰接重型车辆控制方法,以对车辆转向精准控制,同时降低整车消耗,提高车辆续航里程。
2、为了解决上述技术问题,本发明采用的技术方案为:一种矿用前后双电机四驱铰接重型车辆控制方法,所述车辆包括:前车架和后车架,前车架和后车架通过回转轴承铰接,还通过右转向油缸和左转向油缸连接,所述前车架上设置的前轮通过前驱动电机驱动,后车架上设置的后轮通过后驱动电机驱动,所述控制方法包括转向控制方法和行走控制方法,所述转向控制方法以下步骤:
3、s101、接收给定转向角度信息;
4、s102、根据给定转向角度计算右转向油缸和左转向油缸的应伸长量;
5、s103、驱动对应的油缸伸出或缩回直至伸长量达到要求;
6、所述行走控制方法包括以下步骤:
7、s201、接收油门踏板开度信息;
8、s202、根据油门踏板开度确定整车给定车速以及前驱动电机和后驱动电机的给定转速;
9、s203、计算后驱动电机的功率系数;
10、s204、根据后驱动电机的功率系数判断车辆状态,并根据车辆状态确定各个电机的控制方式,具体方法为:
11、若为空载,则后驱动电机采用转矩闭环模式控制,将后驱动电机的给定转速对应转矩作为后驱动电机初始转矩,通过后驱动电机转矩调整系数调整后驱动电机给定转矩;前驱动电机不参与整车控制;
12、若为轻载,则后驱动电机采用转矩闭环模式控制,将后驱动电机的给定转速对应转矩作为后驱动电机初始转矩,通过后驱动电机转矩调整系数调整后驱动电机给定转矩;前驱动电机采用转速闭环模式,前驱动电机转速跟随后驱动电机转速;
13、若为重载,则前驱动电机和后驱动电机均采用转矩闭环模式,且转速均小于其额定转速,将转速转矩数据库中的电机最大转矩tmax作为初始给定转矩,通过各自的转矩调整系数调整电机的给定转矩。
14、所述后驱动电机的功率系数的计算公式为:
15、
16、其中,kp表示后驱动电机的功率系数,u2、i2为后电机驱动器的输入电压和电流,,pn为后驱动电机的额定功率。
17、所述步骤s204中,转矩调整系数的计算公式为:
18、
19、其中,km表示转矩调整系数,i表示电机实际输出电流,in表示电机额定电流。
20、所述步骤s204中,通过转矩调整系数调整电机的给定转矩具体方式为:将电机转矩调整系数与上一个给定转矩的乘积作为电机下一个给定转矩,调整电机转矩。
21、左转向油缸和右转向油缸的伸长量的计算公式为:
22、
23、
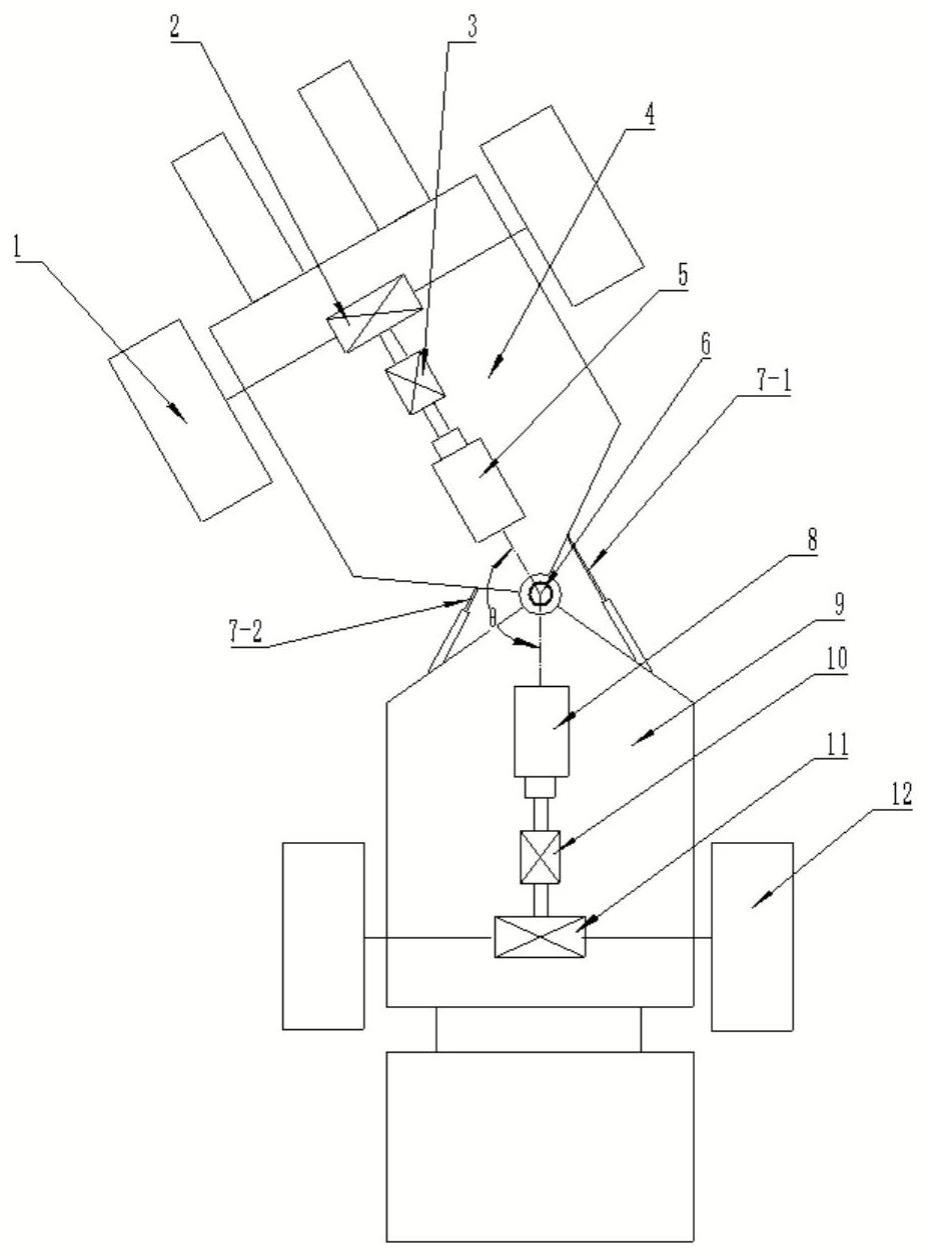
24、其中,ac表示左转向油缸活塞的应伸长量,ac’表示右转向油缸活塞的应伸长量,oa和ob表示回转轴承(6)分别与左转向油缸(7-2)的两个固定端之间的距离,oa’和ob’表示回转轴承(6)分别与右转向油缸(7-1)的两个固定端之间的距离,θ表示整车转向角,α和β分别表示前车架和后车架的半张角;bc和b’c’分别表示左转向油缸(7-2)和右转向油缸(7-1)的原长。
25、所述步骤s103中,设定转向角阈值δ,当满足以下条件时,认为达到转向要求:
26、
27、其中,l0表示油缸的应伸长量,l表示油缸的实际伸长量。
28、根据后驱动电机的功率系数判断车辆状态的具体方法为:
29、若后驱动电机的功率系数小于空载系数,则为空载;
30、若后驱动电机的功率系数大于等于空载系数且小于轻载系数,则为轻载;
31、若后驱动电机的功率系数大于等于轻载系数,则为重载。
32、所述空载系数取值为kp1=0.5,轻载系数取值为kp2=0.75。
33、所述步骤s202中,前驱动电机和后驱动电机的给定转速为:
34、vmotor_demand=nmax×aacc;
35、其中,vmotor_demand为电机的给定转速,aacc为踏板开度,nmax表示电机最大给定转速。
36、所述的一种矿用前后双电机四驱铰接重型车辆控制方法,还包括以下步骤:s200、建立电机转速转矩数据库表,确定电机恒转矩工作区和恒功率工作区,确定额定转速nn,最大转速nmax,额定转矩tn和最大转矩tmax。
37、本发明与现有技术相比具有以下有益效果:
38、本发明提供了一种矿用前后双电机四驱铰接重型车辆控制方法,有益于转向精准控制。通过后电机功率系数kp判断负载情况,然后针对不同的负载情况进行不同的前后电机控制方法,便于降低整车总消耗电功率,提高蓄电池车辆续航里程。
技术特征:
1.一种矿用前后双电机四驱铰接重型车辆控制方法,其特征在于,所述车辆包括:前车架(4)和后车架(9),前车架(4)和后车架(9)通过回转轴承(6)铰接,还通过右转向油缸(7-1)和左转向油缸(7-2)连接,所述前车架(4)上设置的前轮(1)通过前驱动电机(5)驱动,后车架(9)上设置的后轮(12)通过后驱动电机(8)驱动,所述控制方法包括转向控制方法和行走控制方法,所述转向控制方法以下步骤:
2.根据权利要求1所述的一种矿用前后双电机四驱铰接重型车辆控制方法,其特征在于,所述后驱动电机的功率系数的计算公式为:
3.根据权利要求1所述的一种矿用前后双电机四驱铰接重型车辆控制方法,其特征在于,所述步骤s204中,转矩调整系数的计算公式为:
4.根据权利要求1所述的一种矿用前后双电机四驱铰接重型车辆控制方法,其特征在于,所述所述步骤s204中,通过转矩调整系数调整电机的给定转矩具体方式为:将电机转矩调整系数与上一个给定转矩的乘积作为电机下一个给定转矩,调整电机转矩。
5.根据权利要求1所述的一种矿用前后双电机四驱铰接重型车辆控制方法,其特征在于,左转向油缸(7-2)和右转向油缸(7-1)的伸长量的计算公式为:
6.根据权利要求1所述的一种矿用前后双电机四驱铰接重型车辆控制方法,其特征在于,所述步骤s103中,设定转向角阈值δ,当满足以下条件时,认为达到转向要求:
7.根据权利要求1所述的一种矿用前后双电机四驱铰接重型车辆控制方法,其特征在于,根据后驱动电机的功率系数判断车辆状态的具体方法为:
8.根据权利要求7所述的一种矿用前后双电机四驱铰接重型车辆控制方法,其特征在于,所述空载系数取值为kp1=0.5,轻载系数取值为kp2=0.75。
9.根据权利要求1所述的一种矿用前后双电机四驱铰接重型车辆控制方法,其特征在于,所述步骤s202中,前驱动电机和后驱动电机的给定转速为:
10.根据权利要求1所述的一种矿用前后双电机四驱铰接重型车辆控制方法,其特征在于,还包括以下步骤:s200、建立电机转速转矩数据库表,确定电机恒转矩工作区和恒功率工作区,确定额定转速nn,最大转速nmax,额定转矩tn和最大转矩tmax。
技术总结
本发明属于矿用属于煤矿运输设备技术领域,具体涉及一种矿用前后双电机四驱铰接重型车辆控制方法,包括转向控制方法和行走控制方法,所述转向控制方法以下步骤:S101、接收给定转向角度信息;S102、根据给定转向角度计算右转向油缸和左转向油缸的应伸长量;S103、驱动对应的油缸伸出或缩回直至伸长量达到要求;行走控制方法包括以下步骤:S201、接收油门踏板开度信息;S202、根据油门踏板开度确定整车给定车速以及前驱动电机和后驱动电机的给定转速;S203、计算后驱动电机的功率系数;S204、根据后驱动电机的功率系数判断车辆状态,根据车辆状态控制前驱动电机和后驱动电机的控制模式。本发明可以降低整车总消耗电功率,提高蓄电池车辆续航里程。
技术研发人员:田克君,曹建文,姜铭,龙先江,王健,郭利强,王涛,乔佳伟,高鹏,杜会峰,程玉斌,康永玲,杨勇,许连丙,马天洲
受保护的技术使用者:中国煤炭科工集团太原研究院有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!