转向角度校准系统、方法和存储介质与流程
本发明涉及用于诸如自主运载工具等的运载工具的转向角度校准。
背景技术:
1、为了自主运载工具的安全运行,必须定期对准自主运载工具的转向角度。转向角对准是控制自主运载工具的关键,因为自主运载工具的控制系统取决于准确的转向角度来生成控制命令。机械转向角度对准通常由汽车修理厂的技师或机械师进行。
技术实现思路
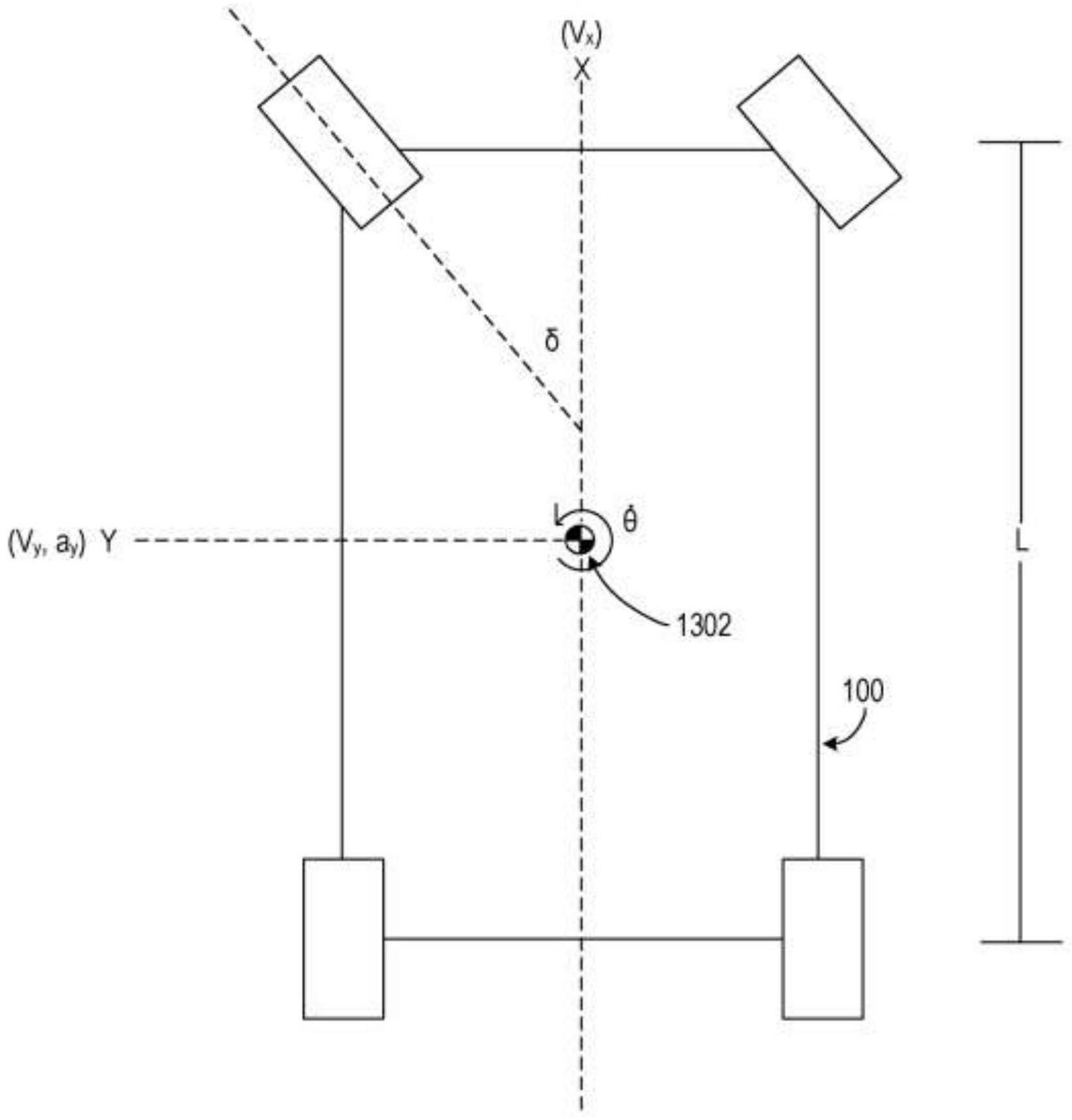
1、一般而言,在一方面,自主运载工具接收转向角度测量结果和偏航角速率测量结果,并且使用转向角度测量结果、偏航角速率测量结果和自主运载工具的轴距来估计转向角度偏移。基于偏航角速率模型、转向角度测量结果和估计的转向角度偏移来确定估计的偏航角速率。比较偏航角速率测量结果与估计的偏航角速率,并基于比较来发起自主运载工具的动作。
2、在实施例中,一种方法包括:从自主运载工具的处理电路接收转向角度测量结果;从所述处理电路接收偏航角速率测量结果;使用所述处理电路,基于所述转向角度测量结果、所述偏航角速率测量结果和所述自主运载工具的轴距来估计转向角度偏移;使用所述处理电路,基于偏航角速率模型、所述转向角度测量结果和估计的转向角度偏移来确定估计的偏航角速率;以及使用控制电路基于所述转向角度偏移来操作所述自主运载工具。
3、所述方法还包括使用所述处理电路比较所述偏航角速率测量结果和估计的偏航角速率;以及使用所述处理电路基于所述比较的结果来发起所述自主运载工具上的动作。
4、在实施例中,所述动作包括通过所述处理电路使用估计的偏航角速率来校准所述偏航角速率测量结果。
5、在实施例中,接收所述转向角度测量结果包括:在所述自主运载工具正在左转的情况下,使用所述处理电路接收测得的转向角度的左转分量;在所述自主运载工具正在右转的情况下,使用所述处理电路接收测得的转向角度的右转分量;以及使用所述处理电路进行确定。在实施例中,测得的转向角度是所述左转分量和所述右转分量的平均值。在实施例中,测得的转向角度是所述左转分量和所述右转分量的加权和。
6、在实施例中,使用递归最小二乘自适应滤波公式来确定所述估计的转向角度偏移,所述递归最小二乘自适应滤波公式包括转向角度测量结果、偏航角速率测量结果和所述自主运载工具的轴距。
7、在实施例中,使用卡尔曼滤波公式来确定所述估计的转向角度偏移,所述卡尔曼滤波公式包括转向角度测量结果、偏航角速率测量结果和所述自主运载工具的轴距。
8、在实施例中,所述方法还包括:使用所述处理电路比较所述自主运载工具的前进速率和前进速率阈值;使用所述处理电路比较所述偏航角速率测量结果和偏航角速率阈值;使用所述处理电路分别比较自主运载工具的横向加速度测量结果和横向加速度阈值或滑移角度测量结果和滑移角度阈值;以及使用所述处理电路基于所述比较的一个或多个结果来排除或增强所述转向角度测量结果。
9、在实施例中,所述方法还包括:使用来自所述自主运载工具的一个或多个传感器的数据确定所述自主运载工具的轮是否与路面静态接触;以及根据确定为所述自主运载工具的轮没有与路面静态接触,使用所述处理电路来排除或增强所述转向角度测量结果。
10、在实施例中,所述方法还包括估计在一段时间或驾驶距离上的多个转向角度偏移;以及过滤所述多个转向角度偏移以移除估计的转向角度偏移的异常值。
11、在实施例中,发起所述自主运载工具上的动作还包括:使用所述自主运载工具的输出装置或乘客的个人装置呈现维护报警。
12、在实施例中,发起所述自主运载工具上的动作还包括:使用所述自主运载工具的无线发射器,向基于网络的计算平台发送转向角度测量结果和偏航角速率测量结果中的至少一者;使用所述自主运载工具的无线接收器从所述基于网络的计算平台接收维护报警;以及使用所述自主运载工具的输出装置,呈现所述维护报警。
13、在实施例中,发起所述自主运载工具上的动作还包括:使用所述自主运载工具的无线发射器向基于网络的计算平台发送路面条件信息;以及使用所述自主运载工具的无线接收器从所述基于网络的计算平台接收转向角度校准参数,其中所述转向角度校准参数是通过所述基于网络的计算平台基于所述路面条件信息来确定的;以及通过所述处理电路利用所述转向角度校准参数增强所述转向角度测量结果。
14、在实施例中,所述方法还包括:使用控制电路根据最大限速操作自主运载工具,其中,所述最大限速是基于所述转向角度偏移来确定的。在实施例中,基于所述转向角度偏移和环境的天气条件的集合来确定所述最大限速。
15、在实施例中,一种用于自主运载工具的转向角度校准系统包括:转向角度传感器;偏航角速率传感器;一个或多个处理电路;以及存储有指令的一个或多个非暂时性存储介质,所述指令在由所述一个或多个处理电路执行时使得进行操作,所述操作包括:从所述转向角度传感器接收转向角度测量结果;从所述偏航角速率传感器接收偏航角速率测量结果;基于所述转向角度测量结果、所述偏航角速率测量结果和所述自主运载工具的轴距来估计转向角度偏移;确定估计的偏航角速率,所述估计的偏航角速率是基于偏航角速率模型、所述转向角度测量结果和估计的转向角度偏移来确定的;比较所述偏航角速率测量结果和所述估计的偏航角速率;以及基于所述比较的结果来发起所述自主运载工具上的动作。
16、在实施例中,所述转向角度传感器是转向柱传感器或方向盘传感器。
17、这些和其它方面、特征和实现可被表示为方法、设备、系统、组件、程序产品、用于进行功能的部件或步骤以及其它方式。
18、从以下的包括权利要求书的说明书,这些和其它方面、特征和实现将变得明显。
技术特征:
1.一种方法,包括:
2.根据权利要求1所述的方法,还包括:
3.根据权利要求2所述的方法,其中,所述动作包括:
4.根据权利要求1所述的方法,其中,接收所述转向角度偏移包括:
5.根据权利要求4所述的方法,其中,估计的转向角度测量结果是所述左转分量和所述右转分量的平均值。
6.根据权利要求1所述的方法,其中,使用递归最小二乘估计器公式来确定估计的转向角度偏移,所述递归最小二乘估计器公式包括所述转向角度测量结果、所述偏航角速率测量结果和所述av的轴距。
7.根据权利要求1所述的方法,其中,使用卡尔曼滤波公式来确定估计的转向角度偏移,所述卡尔曼滤波公式包括所述转向角度测量结果、所述偏航角速率测量结果和所述av的轴距。
8.根据权利要求1所述的方法,还包括:
9.一种用于自主运载工具即av的转向角度校准系统,所述系统包括:
10.一种存储有指令的非暂时性计算机可读存储介质,所述指令在由一个或多个处理器执行时使得所述一个或多个处理器进行根据权利要求1至8中任一项所述的方法。
技术总结
此外,描述了用于转向角度校准的系统、方法和存储介质。自主运载工具接收转向角度测量结果和偏航角速率测量结果,并使用转向角度测量结果、偏航角速率测量结果和自主运载工具的轴距来估计转向角度偏移。基于偏航角速率模型、转向角度测量结果和估计的转向角度偏移来确定估计的偏航角速率。比较偏航角速率测量结果和估计的偏航角速率,并响应于该比较而发起自主运载工具上的动作。
技术研发人员:O·A·阿萨德,F·塞卡蒙特
受保护的技术使用者:动态AD有限责任公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!