一种车辆的泊车控制方法、装置、车辆及电子设备与流程
本技术涉及电数字数据处理,具体而言,涉及一种车辆的泊车控制方法、装置、车辆、电子设备及计算机存储介质。
背景技术:
1、随着视觉技术的发展,越来越多的车辆加入了车辆的自动泊车功能,通过车辆自带的摄像头获取车辆周围的情况,同时根据获取到的数据进行计算,得到车辆的最佳泊车距离,而后控制车辆进行移动,实现泊车。
2、然而,现有技术使用模型预测来进行横向控制,这种方式会导致计算量增加,对于芯片的算力要求提高,计算时间长,不便实现量产搭载,极大的增加泊车成本。
技术实现思路
1、本技术实施例的目的在于提供一种车辆的泊车控制方法、装置、车辆及电子设备,可以提高车辆的自动泊车性能,减少芯片的计算时间,便于实现量产搭载,降低了泊车成本。
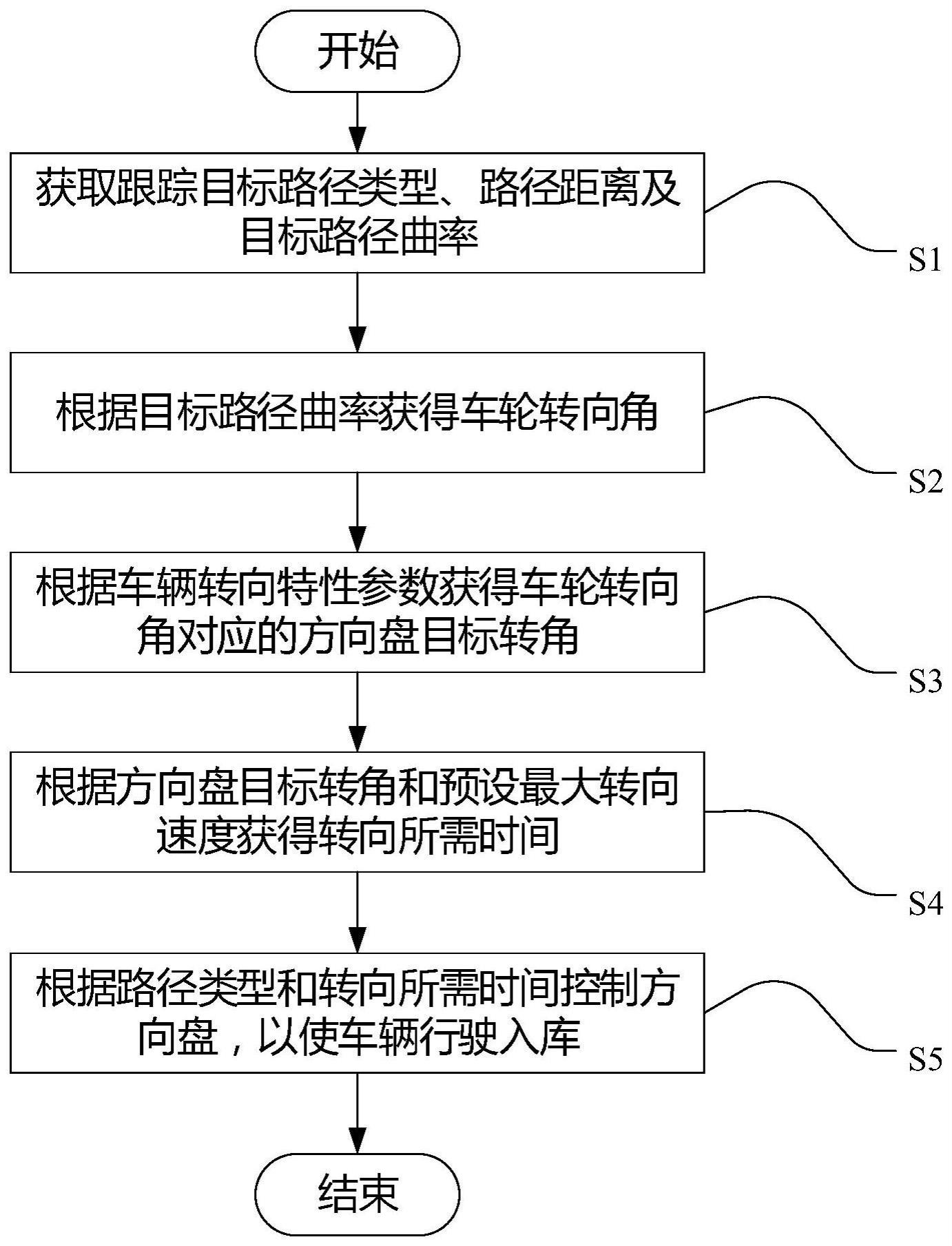
2、第一方面,本技术实施例提供了一种车辆的泊车控制方法,所述方法包括:
3、获取跟踪目标路径类型、路径距离及目标路径曲率;
4、根据所述目标路径曲率获得车轮转向角;
5、根据车辆转向特性参数获得所述车轮转向角对应的方向盘目标转角;
6、根据所述方向盘目标转角和预设最大转向速度获得转向所需时间;
7、根据路径类型和所述转向所需时间控制方向盘,以使所述车辆行驶入库。
8、在上述实现过程中,根据不同的路径类型控制方向盘,实现对车辆的自动化控制,使得车辆可以更快、更准确、更安全地进行泊车,可以提高车辆的自动泊车性能,减少芯片的计算时间,便于实现量产搭载,降低了泊车成本。
9、进一步地,根据以下方式根据所述目标路径曲率获得车轮转向角:
10、
11、其中,为所述车轮转向角,r为所述目标路径曲率,l为车辆轴距。
12、在上述实现过程中,获得车辆转向角,可以在车辆盲区范围内实现车辆的最大转动,减少了车辆发生碰撞的可能性,提高了泊车过程中的安全性。
13、进一步地,所述根据路径类型和所述转向所需时间控制方向盘,以使所述车辆行驶入库的步骤,包括:
14、若所述路径类型为第一预设类型,控制所述方向盘进行转动,得到方向盘当前转角,根据所述方向盘当前转角控制所述车辆行驶入库;
15、若所述路径类型为第二预设类型,控制所述车辆行驶预设距离,同时根据所述转向所需时间控制方向盘,以使所述车辆行驶入库;
16、若所述路径类型为第三预设类型,控制所述方向盘进行转动,得到方向盘当前转角,根据所述方向盘当前转角控制所述车辆进行行驶,以使所述车辆行驶入库;
17、若所述路径类型为第四预设类型,根据所述方向盘当前转角控制所述方向盘,同时控制所述车辆行驶,以使所述车辆行驶入库。
18、在上述实现过程中,根据不同的路径类型对车辆进行不同方式的泊车,使得车辆的泊车更加自由,根据不同的情况可以进行不同的选择,使得泊车更加安全、准确。
19、进一步地,若所述路径类型为第一预设类型,所述控制所述方向盘进行转动,得到方向盘当前转角,根据所述方向盘当前转角控制所述车辆行驶入库的步骤,包括:
20、当所述方向盘当前转角等于所述方向盘目标转角,控制所述车辆行驶预设距离,以使所述车辆行驶入库。
21、在上述实现过程中,当方向盘当前转角等于方向盘目标转角,直接控制车辆行驶预设距离,确保车辆可以安全行驶入库,减少了泊车过程中的等待时间,提高泊车效率。
22、进一步地,若所述路径类型为第二预设类型,所述控制所述车辆行驶预设距离,同时根据所述转向所需时间控制方向盘,以使所述车辆行驶入库的步骤,包括:
23、根据所述转向所需时间获得第一控制时间和第二控制时间;
24、控制所述方向盘根据所述预设最大转向速度转至所述方向盘目标转角;
25、在所述第一控制时间内维持所述方向盘处于所述方向盘目标转角;
26、在所述第二控制时间内控制所述方向盘由所述方向盘目标转角转至0度,以使所述车辆行驶入库。
27、在上述实现过程中,根据第一控制时间和第二控制时间阶段性地对车辆的方向盘进行控制,可以实现更加精准地控制,使得车辆的泊车过程更加平稳、准确。
28、进一步地,若所述路径类型为第三预设类型,所述控制所述方向盘进行转动,得到方向盘当前转角,根据所述方向盘当前转角控制所述车辆进行行驶,以使所述车辆行驶入库的步骤,包括:
29、当所述方向盘当前转角等于所述方向盘目标转角,控制所述车辆行驶第三控制时间;
30、在所述第二控制时间内控制所述方向盘根据所述预设最大转向速度由所述方向盘目标转角转至0度,以使所述车辆行驶入库。
31、在上述实现过程中,根据第二控制时间和第三控制时间控制车辆入库,确保车辆可以更快地进行入库,可以有效避免长时间的等待。
32、进一步地,若所述路径类型为第四预设类型,所述根据所述方向盘当前转角控制所述方向盘,同时控制所述车辆行驶,以使所述车辆行驶入库的步骤,包括:
33、根据所述转向所需时间获得第三控制时间和第四控制时间;
34、在所述第三控制时间内控制所述方向盘根据所述预设最大转向速度转至所述方向盘目标转角;
35、在所述第四控制时间内维持所述方向盘处于所述方向盘目标转角,同时控制所述车辆行驶预设距离后停止,以使所述车辆行驶入库。
36、在上述实现过程中,根据第三控制时间和第四控制时间对车辆的方向盘进行控制,使得方向盘的转动更加精确,有效避免车辆泊车过程中出现碰撞。
37、第二方面,本技术实施例还提供了一种车辆的泊车控制装置,所述装置包括:
38、获取模块,用于获取跟踪目标路径类型、路径距离及目标路径曲率;
39、数据获得模块,用于根据所述目标路径曲率获得车轮转向角;还用于根据车辆转向特性参数获得所述车轮转向角对应的方向盘目标转角;还用于根据所述方向盘目标转角和预设最大转向速度获得转向所需时间;
40、控制模块,用于根据路径类型和所述转向所需时间控制方向盘,以使所述车辆行驶入库。
41、在上述实现过程中,根据不同的路径类型控制方向盘,实现对车辆的自动化控制,使得车辆可以更快、更准确、更安全地进行泊车,可以提高车辆的自动泊车性能,减少芯片的计算时间,便于实现量产搭载,降低了泊车成本。
42、第三方面,本技术实施例提供的一种车辆,包括第二方面的车辆的泊车控制装置。
43、第四方面,本技术实施例提供的一种电子设备,包括:存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面任一项所述的方法的步骤。
44、第五方面,本技术实施例提供的一种计算机可读存储介质,所述存储介质上存储有指令,当所述指令在计算机上运行时,使得所述计算机执行如第一方面任一项所述的方法。
45、第六方面,本技术实施例提供的一种计算机程序产品,所述计算机程序产品在计算机上运行时,使得计算机执行如第一方面任一项所述的方法。
46、本公开的其他特征和优点将在随后的说明书中阐述,或者,部分特征和优点可以从说明书推知或毫无疑义地确定,或者通过实施本公开的上述技术即可得知。
47、并可依照说明书的内容予以实施,以下以本技术的较佳实施例并配合附图详细说明如后。
- 还没有人留言评论。精彩留言会获得点赞!