一种具有自适应功能的爬壁机器人的制作方法
本发明涉及爬壁机器人,具体涉及一种具有自适应功能的爬壁机器人。
背景技术:
1、近年来,爬壁机器人在很多特殊高危行业得到了应用,其能够代替操作工人进入罐体等有限空间进行作业,有效地降低了安全事故发生概率,对于建设本质安全型企业具有重要意义,近年来获得了国内外科研单位的广泛关注。
2、然而,现有的爬壁机器人的驱动轮与爬壁机器人的壳体之间多为刚性连接,导致平台轮子与罐体的弧面的贴合性差,从而严重爬壁机器人对罐体的吸附力,平台易掉落。因此,如何提高爬壁机器人对弧形面的吸附能力,增加作业的可靠性,解决如高速混床等具有弧面的有限空间金属容器内部的探测成为需要解决的问题。
技术实现思路
1、本发明针对现有现有技术中爬壁机器人与弧形面吸附力差,易掉落的技术问题,提供一种具有自适应功能的爬壁机器人。
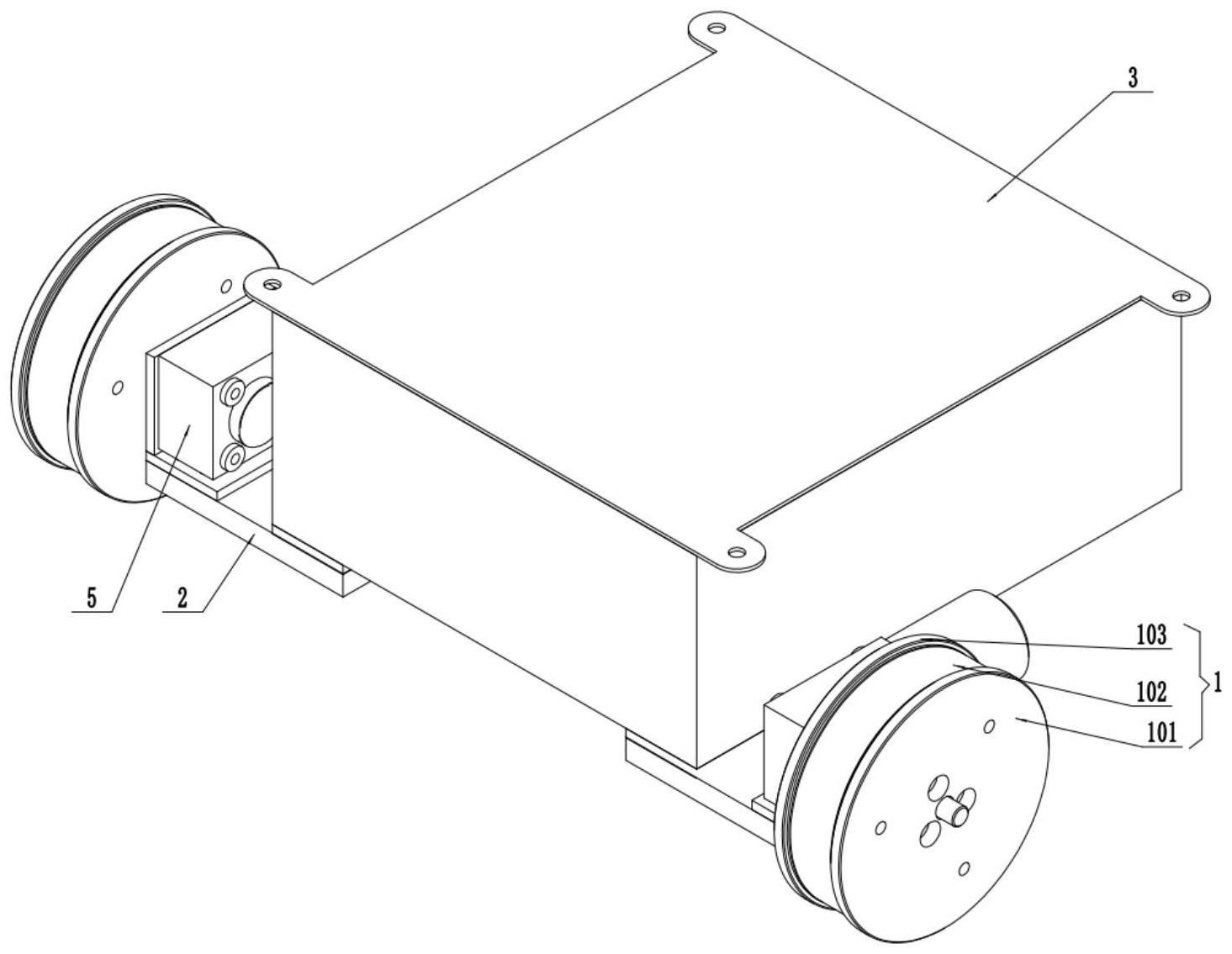
2、本发明解决上述技术问题的技术方案如下:一种具有自适应功能的爬壁机器人,包括爬壁平台本体,所述爬壁平台本体包括壳体、从动磁吸轮和两组主动磁吸部件,所述从动磁吸轮设置在所述壳体的一端,所述主动磁吸部件设置在所述壳体的另一端,两组所述主动磁吸部件对称设置在所述壳体的两侧,每组所述主动磁吸部件包括磁性滚动体组件、柔性板和驱动电机,所述柔性板一端与所述壳体连接,另一端与所述驱动电机连接,所述驱动电机的输出轴与所述磁性滚动体组件传动连接,所述驱动电机与控制器通信连接。
3、在上述技术方案的基础上,本发明为了达到使用的方便以及装备的稳定性,还可以对上述的技术方案作出如下的改进:
4、优选的,所述柔性板的材质为聚氨基甲酸酯。
5、优选的,所述磁性滚动体组件包括圆形铁板一、主动磁吸轮和圆形铁板二,所述主动磁吸轮呈圆环形,所述圆形铁板一设置在所述主动磁吸轮的一侧,所述圆形铁板二设置在所述主动磁吸轮的另一侧。
6、优选的,所述磁性滚动体组件包括主动磁吸球体。
7、优选的,所述主动磁吸轮和所述磁吸球体的材质为n52钕铁硼磁铁。
8、优选的,所述从动磁吸轮为万向轮结构。
9、优选的,所述爬壁平台本体至少设有一个。
10、优选的,所述爬壁平台本体设有两个,所述壳体上设有用于连接的凸耳,一个所述爬壁平台本体的主动磁吸部件位于一端,另一个爬壁平台本体的主动磁吸部件位于另一端。
11、优选的,所述爬壁平台本体用于与无线基站无线通信连接,所述无线基站通过网线与所述控制器通信连接。
12、本发明的有益效果是:通过柔性板将主动磁吸部件与壳体连接,可在各种弧度的铁质金属表面实现自适应性调整,以达到最佳吸附效果,有效地解决了现有爬壁机器人在弧形铁质金属表面适应性差的问题,降低了爬壁机器人掉落的概率,提高了爬壁机器人使用时的可靠性。
技术特征:
1.一种具有自适应功能的爬壁机器人,其特征在于,包括爬壁平台本体,所述爬壁平台本体包括壳体(3)、从动磁吸轮(4)和两组主动磁吸部件,所述从动磁吸轮(4)设置在所述壳体(3)的一端,所述主动磁吸部件设置在所述壳体(3)的另一端,两组所述主动磁吸部件对称设置在所述壳体(3)的两侧,每组所述主动磁吸部件包括磁性滚动体组件(1)、柔性板(2)和驱动电机(5),所述柔性板(2)一端与所述壳体(3)连接,另一端与所述驱动电机(5)连接,所述驱动电机(5)的输出轴与所述磁性滚动体组件(1)传动连接,所述驱动电机(5)与控制器(9)通信连接。
2.根据权利要求1所述的爬壁机器人,其特征在于,所述柔性板(2)的材质为聚氨基甲酸酯。
3.根据权利要求2所述的爬壁机器人,其特征在于,所述磁性滚动体组件(1)包括圆形铁板一(101)、主动磁吸轮(102)和圆形铁板二(103),所述主动磁吸轮(102)呈圆环形,所述圆形铁板一(101)设置在所述主动磁吸轮(102)的一侧,所述圆形铁板二(103)设置在所述主动磁吸轮(102)的另一侧。
4.根据权利要求2所述的爬壁机器人,其特征在于,所述磁性滚动体组件(1)包括主动磁吸球体。
5.根据权利要求3或4所述的爬壁机器人,其特征在于,所述主动磁吸轮(102)和所述主动磁吸球体的材质均为n52钕铁硼磁铁。
6.根据权利要求1或2所述的爬壁机器人,其特征在于,所述从动磁吸轮(4)为万向轮结构。
7.根据权利要求1或2所述的爬壁机器人,其特征在于,所述爬壁平台本体至少设有一个。
8.根据权利要求7所述的爬壁机器人,其特征在于,所述爬壁平台本体设有两个,所述壳体(3)上设有用于连接的凸耳,一个所述爬壁平台本体的主动磁吸部件位于一端,另一个所述爬壁平台本体的主动磁吸部件位于另一端。
9.根据权利要求1或2所述的爬壁机器人,其特征在于,所述爬壁平台本体用于与无线基站(7)无线通信连接,所述无线基站(7)通过网线与所述控制器(9)通信连接。
技术总结
本发明涉及一种具有自适应功能的爬壁机器人,包括爬壁平台本体,所述爬壁平台本体包括壳体、从动磁吸轮和两组主动磁吸部件,所述从动磁吸轮设置在所述壳体的一端,所述主动磁吸部件设置在所述壳体的另一端,两组所述主动磁吸部件对称设置在所述壳体的两侧,每组所述主动磁吸部件包括磁性滚动体组件、柔性板和驱动电机,所述柔性板一端与所述壳体连接,另一端与所述驱动电机连接,所述驱动电机的输出轴与所述磁性滚动体组件传动连接,所述驱动电机与控制器通信连接。通过柔性板将主动磁吸部件与壳体连接,在各种弧度的铁质金属表面实现自适应性调整,以达到最佳吸附效果,有效地解决了在现有爬壁平台对于弧面铁质金属表面适应性差的问题。
技术研发人员:李扬,李瑞东,王伟虎,和雄伟,孙涛,赵小楠,张助理,李洪生
受保护的技术使用者:京能(锡林郭勒)发电有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!