一种车辆自主驾驶横向控制方法与流程
本发明涉及一种车辆自主驾驶横向控制方法,属于车辆导航。
背景技术:
1、目前,现有技术中,常用的车辆横向控制功能中对于eps电子助力转向控制器转向干预的转矩常用的计算方法如下:
2、通过对横向位置偏差或者横向偏航角偏差进行pid控制得到eps电子助力转向控制器的执行转角;
3、通过对横摆角速度偏差进行pid控制得到eps的执行转矩tcmd;
4、通过对横向位置偏差进行比例和积分控制得到eps的执行转矩tcmd1以及对车辆的航向角偏差进行比例和积分控制得到eps的执行转矩tcmd2,然后对这两个执行扭矩进行加权求和:
5、。
6、当前的方法是利用车辆的横向位置或者横向偏航角通过特定的算法(pid控制、lqr控制等)计算出期望的eps转角或者eps转矩,存在的缺陷也非常明显。
7、采用eps转矩控制的方法在行车的时候,容易产生转向角超调,车辆存在偏出车道线的风险。
8、采用eps转角控制的方法在行车的时候,eps内部需要增加逻辑通过特定的算法(pid控制、lqr控制等)计算出eps执行电机的助力转矩,这会导致adas控制器的转角指令得出->eps执行转矩的计算延迟,不仅增加了车辆偏出车道线的风险,也增加了eps控制方向盘转角抖动的风险。
技术实现思路
1、本发明所要解决的技术问题是,克服现有技术的不足,提供一种车辆自主驾驶控制系统及车辆横向控制方法,保证车辆行驶在满足特定条件的车道线内,安全且高效。
2、为了解决上述技术问题,本发明的技术方案是:
3、本发明提供一种车辆自主驾驶横向控制方法,它包括:
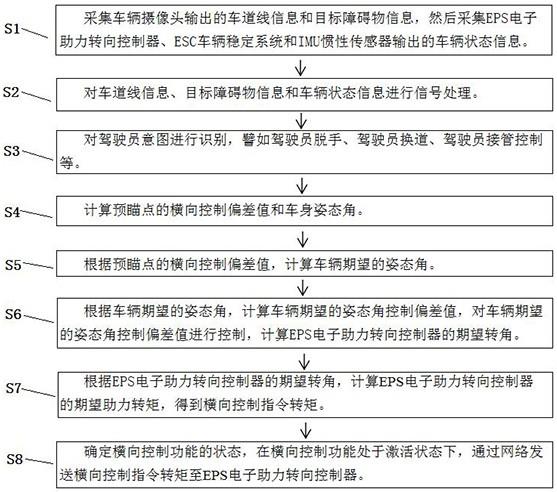
4、步骤s1、采集车辆摄像头输出的车道线信息和目标障碍物信息,然后采集车辆的eps电子助力转向控制器、esc车辆稳定系统和imu惯性传感器输出的车辆状态信息;
5、步骤s2、对车道线信息、目标障碍物信息和车辆状态信息进行信号处理;
6、步骤s3、对驾驶员意图进行识别;
7、步骤s4、计算预瞄点的横向控制偏差值和车身姿态角;
8、步骤s5、根据预瞄点的横向控制偏差值,计算车辆期望的姿态角;
9、步骤s6、根据车辆期望的姿态角,计算车辆期望的姿态角控制偏差值,对车辆期望的姿态角控制偏差值进行控制,计算eps电子助力转向控制器的期望转角;
10、步骤s7、根据eps电子助力转向控制器的期望转角,计算eps电子助力转向控制器的期望助力转矩,得到横向控制指令转矩;
11、步骤s8、确定横向控制功能的状态,在横向控制功能处于激活状态下,发送横向控制指令转矩至eps电子助力转向控制器。
12、进一步,所述步骤s2中,对所述车道线信息进行信号处理,具体包括如下步骤:
13、根据摄像头识别的左侧车道线方程:
14、其中,l0、l1、l2和l3均为常量;
15、根据摄像头识别的右侧车道线方程:
16、其中,r0、r1、r2和r3均为常量;
17、将左右车道线的置信度、道路宽度、车道线类型和宽度信息,融合得到车道中心线方程:
18、其中,c0、c1、c2和c3均为常量;
19、所述车道中心线方程的坐标原点位于车辆后轴中心,x轴指向车辆前进的方向,y轴指向与车辆前进方向垂直的侧向平面。
20、进一步,所述步骤s2中,对所述车辆状态信息进行信号处理,具体包括如下步骤:
21、对车速信号和横摆角速度信号进行滤波处理,同时估算车辆的质心侧偏角、车辆行驶的道路状况,所述车辆行驶的道路状况包括车辆是否在沿着有坡道的道路行驶和路面的附着系数。
22、进一步,所述步骤s4中,计算预瞄点的横向控制偏差值和车身姿态角,具体包括如下步骤:
23、根据车辆不同的运动场景,计算不同场景下的预瞄点的横向控制偏差值,所述预瞄点的横向控制偏差值的计算公式如下:
24、;
25、其中,yp为预瞄点p处的横向位移,是车辆的纵向速度,是车辆运动的横摆角速度,是质心侧偏角,是车辆预瞄控制纵向距离,预瞄时间设置为。
26、进一步,若车道线为曲线,车辆沿直线运行,域控制器的mcu模块计算得到车辆的运动轨迹为pp0,预瞄点为p,预瞄点p处的横向位移为pa,然后计算t0时刻预瞄点p处的横向位移pa,所述t0时刻预瞄点p处的横向位移pa的计算方法如下:
27、首先,计算在t0 时刻车辆处于p0点处相对于车道线的横向位移,车身的横向误差为直线段 ,此时;
28、车辆中心到车道左边界的横向位置为:
29、
30、其中,约定左侧横向位置为负,;
31、车辆中心到车道右边界的横向位置为:
32、
33、其中,约定右侧横向位置为正,;
34、所以,车辆在车身坐标原点处的横向位移为:
35、;
36、然后,计算t0时刻预瞄点p处的横向位移,此时;
37、设车辆运行车速为vx,车辆运行方向为沿着p0p直线运动,预瞄点p处的横向位移为:;
38、由于,因此,车辆在预瞄点p处的横向控制偏差为:
39、;
40、最后,计算车辆在预瞄点p处的车辆姿态角,预瞄点p处的车辆姿态角的计算方法如下:
41、在p0处车辆姿态角为车道中心线yc在坐标轴x=0处的c点切线方向和x轴的夹角,此时在车辆质心处的车身航向角为:
42、;
43、在中,oc是车道中心线在c点的法向量方向,根据三角形的内外角关系,得出预瞄点p处的车辆姿态角为:
44、
45、其中,;
46、若车道线曲率变化小于0.01,则圆弧ab近似为,所以 ;
47、预瞄点p处道路的曲率为:其中,是预瞄点p处的道路曲率;
48、道路的曲率变化率在预瞄时间段tp内为常数,将圆弧ac的长度近似为直线,预瞄点p处的道路曲率为:
49、;
50、在t0时刻,车道中心线yc在坐标轴x=0处的曲率 ;
51、则预瞄点p处的车身姿态角为:;
52、若车道线为直线,车辆的行驶方向沿x轴,域控制器的mcu模块计算得到车辆的运动轨迹为p0d,预瞄点为d;
53、预瞄点d处的横向位移为ad,然后计算t0时刻预瞄点d处的横向位移ad,所述t0时刻预瞄点d处的横向位移ad的计算方法如下:
54、首先,计算t0时刻车辆处于坐标原点处的横向误差,t0时刻车辆相对于车道线的航向角,在预瞄时间t p内,车辆保持车速vx前进,质心侧偏角;
55、在t0时刻,直线为此时车辆在坐标原点处的横向误差,车辆在坐标原点处的横向误差的计算公式为:;
56、其中,为车辆在原点处到车道线中心的横向位移,此时x=0,根据左侧车道线方程和右侧车道线方程计算车辆在坐标原点处的横向误差,得到:
57、;
58、然后,计算车辆在预瞄时刻点处的横向控制偏差为:;
59、其中,是域控制器的mcu模块计算得出的车辆不发生侧偏情况下预瞄时刻横向位移,车辆沿x轴行驶到预瞄时刻p点和车道中心线yc的距离为直线pa,所述直线pa为,此时,代入左侧车道线方程和右侧车道线方程得到:
60、;
61、;
62、;
63、车辆实际沿着p0d行驶,在之中,p0p垂直于pd,所以pd的表达式为:;
64、将pd的表达式代入车辆在预瞄时刻点处的横向控制偏差的公式中,得到:;
65、最后,计算车辆在预瞄时刻点处的车身姿态角: ;
66、若车道线为直线,车辆做曲线行驶,域控制器的mcu模块计算得到车辆的运动轨迹为p0d,预瞄点为d;
67、首先,计算车辆在坐标当前点p0处的横向误差,横向误差的计算方法是:;
68、然后,计算车辆在预瞄点d处的横向控制偏差为:;
69、其中,;
70、;
71、根据匀速圆周运动的运动学关系:;
72、所以pd的表达式为:;
73、将pd的表达式代入车辆在预瞄点d处的横向控制偏差的公式中,得到:;
74、由于车辆侧滑角忽略不记,将车辆在预瞄点d处的横向控制偏差的公式简化为:;
75、最后,车辆做直线运动,道路在预瞄点d处的偏航角满足如下公式:其中, ;
76、计算车辆在预瞄点d处的车身姿态角:。
77、进一步,所述步骤s5中,根据预瞄点的横向控制偏差值,计算车辆期望的姿态角,具体包括如下步骤:
78、步骤s51、计算横向位置偏差:
79、;
80、其中,的计算可以根据横向控制的敏感度因子,敏感度因子通常可以通过hmi车辆仪表进行档位设置,譬如敏感度1~4级,分别对应于车道宽度b的百分比δ,一种简单可行的敏感因子1级对应于,第i级对应于,其中i=2、3、4,,根据实际情况可调。如果敏感因子为1级, 这种情况下,对应于车辆的车道线居中保持功能,相当于让车辆的目标轨迹处于车道的中心线。
81、步骤s52、对横向控制偏差值进行控制,计算得出车辆期望的姿态角:
82、;
83、步骤s53、计算车辆期望的姿态角的控制补偿部分:
84、由于车辆在预瞄点处期望的车身姿态角和预瞄处的目标航迹的航向角一致:;
85、如果驾驶员的需求是车道线居中的情况下,那么:;
86、如果驾驶员的需求是车道线保持功能的情况下,那么:;
87、其中,表示横向位移的正负号,为标定常量;
88、步骤s54、对车辆期望的姿态角进行补偿: ;
89、步骤s55、对车辆期望的姿态角进行修正,计算得出最终的车辆期望的姿态角。
90、进一步,所述步骤s6中,根据车辆期望的姿态角,计算车辆期望的姿态角控制偏差值,对车辆期望的姿态角控制偏差值进行控制,计算eps电子助力转向控制器的期望转角,具体包括如下步骤:
91、步骤s61、计算车辆期望的姿态角控制偏差值:
92、其中, ,预瞄点处的车身姿态角;
93、步骤s62、对姿态角控制偏差值进行反馈控制:
94、采用pid控制算法对姿态角控制偏差值进行反馈控制,计算方法如下:
95、 ;
96、步骤s63、对车辆期望的姿态角进行前馈补偿:
97、采用基于车道线曲率补偿方法对车辆期望的姿态角进行前馈补偿,计算方法如下:
98、其中,r是车道线的曲率半径,l是车辆的轮距,是车辆的纵向速度;是车辆的稳定性系数,表示车辆不足转向,表示车辆为中性转向,表示车辆为过度转向;
99、步骤s64、计算带前馈补偿的eps电子助力转向控制器的期望转角:
100、其中,参数是前馈补偿系数;
101、步骤s65、计算最终的eps电子助力转向控制器的期望转角:
102、将所述步骤s64之中计算得到的,进行上下限幅,得到期望转角 。
103、进一步,所述步骤s7中,根据eps电子助力转向控制器的期望转角,计算eps电子助力转向控制器的期望助力转矩,得到横向控制指令转矩,具体包括如下步骤:
104、步骤s71、计算eps电子助力转向控制器的期望转角和实际转角的差值,得到eps电子助力转向控制器的控制偏差:
105、 ;
106、步骤s72、对eps电子助力转向控制器的控制偏差进行控制(pid控制、lqr控制、滑膜控制等),得出eps电子助力转向控制器的期望转矩;
107、步骤s73、根据方向盘反馈转角或者反馈转矩的变化情况,对eps电子助力转向控制器的请求转矩注入谐波补偿转矩,抑制eps电子助力转向控制器的助力电机抖动,通过计算得到谐波补偿转矩;
108、步骤s74、计算带谐波补偿的eps电子助力转向控制器的期望助力转矩:
109、 ;
110、步骤s75、对做上下限值,得到横向控制指令转矩。
111、采用了上述技术方案,本发明具有以下的有益效果:
112、1、本发明能够利用摄像头以及其他车载传感器获取车辆相对于车道线的位置信息、方向信息以及车身状态信息,并根据驾驶员操作状态判断驾驶员意图。当车辆在非驾驶员主观意图的情况下偏离车道中心线时,系统对车辆进行横向干预,辅助驾驶员将车辆保持在车道中间。
113、2、本发明可以使驾驶员减少转向负担,提高驾驶舒适性,可以在一些情况下让车辆保持在车道中间行驶,在驾驶员脱手时会被系统警告,驾驶员主动变道的状况也会被检查并对功能进行抑制。
114、3、本发明可以应用于不同类型(实线、虚线和点状线)和颜色(白色、黄色、橙色和蓝色)的道路交通边线;也可以应用于没有车道线的路沿。
- 还没有人留言评论。精彩留言会获得点赞!