一种高储存效率生鲜配送机器人及其配送方法与流程
本发明涉及物流行业,具体涉及仓储物流领域,特别涉及一种高储存效率生鲜配送机器人及其配送方法。
背景技术:
1、现有技术的物流行业中,通常采用货运架与货箱配合实现对货物的转运操作。例如专利申请号:cn202020781234.5,专利名称:一种配送机器人,公开了一种配送机器人,属于物流技术领域。配送机器人包括:控制器、运动机构、至少一个状态提示灯和外壳;其中,运动机构位于所述配送机器人的底部,所述至少一个状态提示灯设置于所述外壳上,控制器设置于所述配送机器人的内部;控制器分别与所述运动机构、至少一个状态提示灯连接;控制器,用于控制运动机构带动所述配送机器人,按照预设行进路线行进,并根据当前工作状态,控制至少一个状态提示灯发光,以提示所述配送机器人的当前工作状态。
2、但是现有技术中的配送机器人虽然能够实现收纳和配送,但是收纳的空间相对固定,不利于配送多种不同大小的货物,特别是对生鲜的配送,配送机器人的配送空间的传统分隔方式依然不能满足生鲜货物的配送模式。另外,现有技术中的收纳箱通常需要通过隔板将收纳箱的收纳区分隔成多个收纳的隔间,这样的分隔方式限定了收纳区的分隔范围,在收纳生鲜的时候,每个订单中包含的货物数量大小均不相同,因此一方面需要选择适用的隔间,而且如果隔间中放入货物后有空余的空间又不适合给其他订单的货物使用,造成空间的浪费以及收纳的不便捷。
技术实现思路
1、本发明克服了现有技术的不足,提供一种高储存效率生鲜配送机器人及其配送方法,对货物的尺寸和形状适应能力强,提升了配送空间的自适应性。
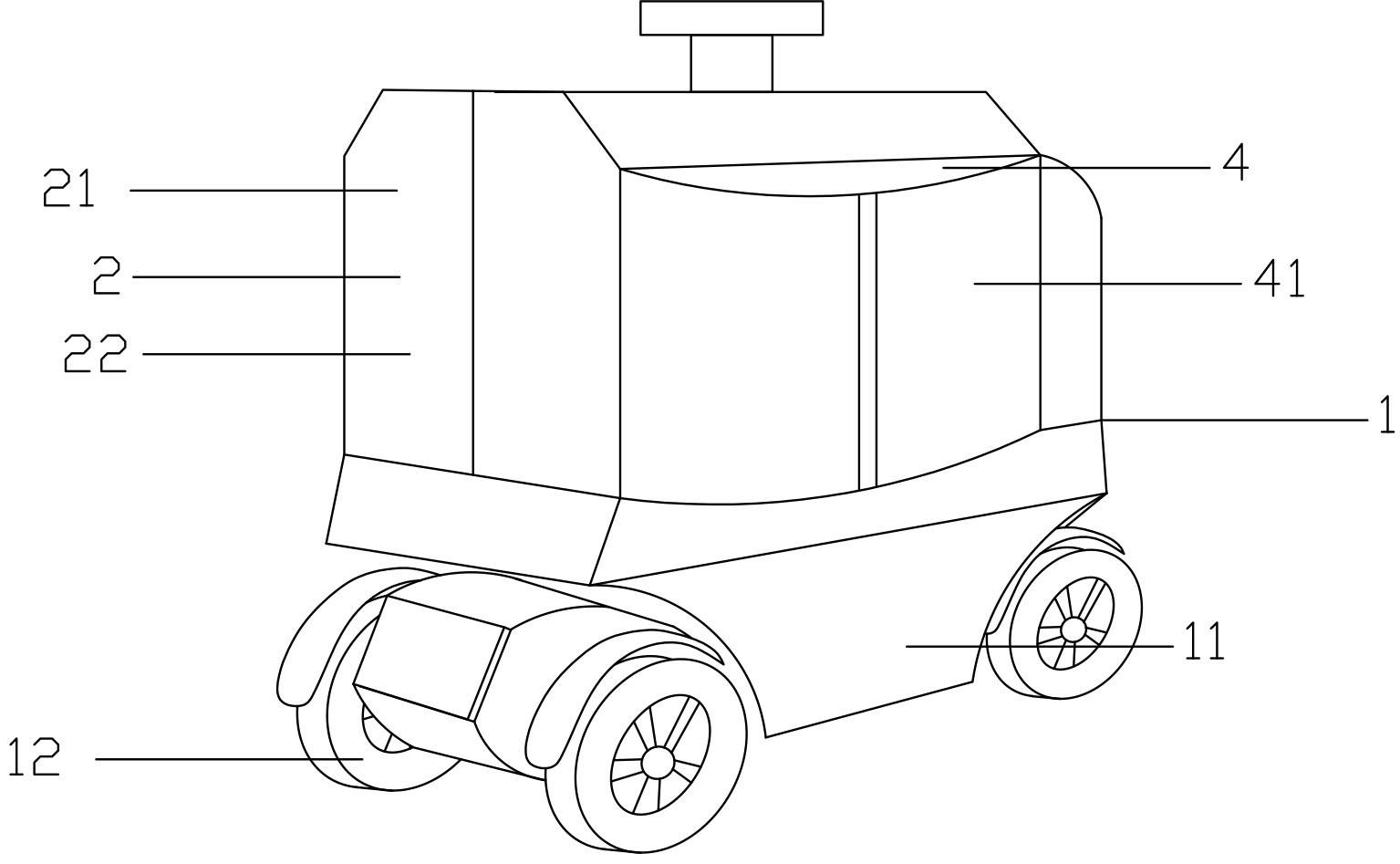
2、为达到上述目的,本发明采用的技术方案为:一种高储存效率生鲜配送机器人,包括配送机器人本体,所述配送机器人本体的下部驱动设置有用于驱动位移或行走的驱动底座,所述配送机器人本体上设置有收纳箱,所述收纳箱的一侧设置有与其连通的取货箱,且所述收纳箱的一侧用过分隔门与取货箱的一侧衔接,所述取货箱的另一侧设置有取货侧;所述收纳箱内设置有若干个挂接收纳部,所述取货箱中设置有能相对所述挂接收纳部位移动作的取货机构。
3、本发明一个较佳实施例中,挂接收纳部包括设置在所述配送机器人本体上的驱动座,所述驱动上设置有延伸至所述收纳箱内的挂接立杆,所述挂接立杆上驱动设置有若干根向外延伸的挂接支杆。
4、本发明一个较佳实施例中,挂接支杆上设置有用于挂接货物的挂接段或/和挂接锁定部。
5、本发明一个较佳实施例中,挂接立杆上驱动设置有若干层环设在所述挂接立杆外周的并向外延伸的挂接支杆。
6、本发明一个较佳实施例中,挂接支杆的一端与挂接立杆驱动连接或枢转连接,所述挂接支杆的另一端通过伸缩杆与挂接段驱动连接。
7、本发明一个较佳实施例中,挂接支杆上设置有挂钩,或,所述挂接支杆上驱动设置有挂接锁定部,所述挂接锁定部包括驱动设置在所述挂接支杆上的枢转驱动部,所述枢转驱动部与锁定钩的一端驱动连接,所述锁定钩的另一端穿设过设置在挂接支杆上的穿设导向块后向上延伸与挂接支杆的下部抵靠。
8、本发明一个较佳实施例中,取货机构包括设置在所述取货箱内部的位移座,所述位移座上驱动设置有伸缩臂,所述伸缩臂上驱动连接有能相对所述挂接收纳部动作位移的夹爪或翻转挂钩。
9、本发明一个较佳实施例中,翻转挂钩的一端与驱动设置在所述伸缩臂上的枢转部驱动连接,所述翻转挂钩的另一端通过所述枢转部能相对所述伸缩臂的上侧翻转。
10、本发明一个较佳实施例中,挂接支杆长短交替间隔错位设置在所述挂接立杆上。
11、本发明一个较佳实施例中,高储存效率生鲜配送机器人的配送使用方法,包括以下步骤:
12、步骤s1,首先将若干组货物通过各个袋装收纳部件装设后挂在收纳箱的挂接收纳部的若干根挂接支杆上;
13、步骤s2,取货时,通过挂接收纳部的驱动座驱动转动挂接立杆,将需要取货的货物的袋装收纳部件转向收纳箱上靠近分隔门的一侧;
14、步骤s3,打开分隔门,驱动取货机构的位移座带动伸缩臂位移至分隔门处待取货的货物的袋装收纳部件处,通过夹爪夹取袋装收纳部件挂在挂接支杆上的端部环套中,夹取袋装收纳部件,挂接支杆释放待取货的货物的袋装收纳部件;
15、步骤s4,驱动取货机构复位至取货箱,关闭分隔门,打开取货箱的取货侧取走货物。
16、根据上述实施例所揭露的技术方案,达到的有益效果是:
17、本发明公开的一种高储存效率生鲜配送机器人及其配送方法,对货物的尺寸和形状适应能力强,提升了配送空间的自适应性。只需要将货物放置入袋装收纳部件中挂设在配送机器人本体的收纳箱的挂接收纳部上,利用挂设的方式将货物进行有序收纳,提升了上货的便捷性。同时还不需要将收纳箱内的收纳区利用其它隔板分隔成固定的区域,进一步提升了收纳的兼容性和便捷性。
18、通过分隔门将收纳箱和取货箱进行分隔,提升了取货的安全性,利用取货箱中能相对收纳箱动作的取货机构实现取货操作。
技术特征:
1.一种高储存效率生鲜配送机器人,包括配送机器人本体,所述配送机器人本体的下部驱动设置有用于驱动位移或行走的驱动底座,所述配送机器人本体上设置有收纳箱,其特征在于:所述收纳箱的一侧设置有与其连通的取货箱,且所述收纳箱的一侧用过分隔门与取货箱的一侧衔接,所述取货箱的另一侧设置有取货侧;所述收纳箱内设置有若干个挂接收纳部,所述取货箱中设置有能相对所述挂接收纳部位移动作的取货机构。
2.根据权利要求1所述的高储存效率生鲜配送机器人,其特征在于:所述挂接收纳部包括设置在所述配送机器人本体上的驱动座,所述驱动上设置有延伸至所述收纳箱内的挂接立杆,所述挂接立杆上驱动设置有若干根向外延伸的挂接支杆。
3.根据权利要求1所述的高储存效率生鲜配送机器人,其特征在于:所述挂接支杆上设置有用于挂接货物的挂接段或/和挂接锁定部。
4.根据权利要求1所述的高储存效率生鲜配送机器人,其特征在于:所述挂接立杆上驱动设置有若干层环设在所述挂接立杆外周的并向外延伸的挂接支杆。
5.根据权利要求1所述的高储存效率生鲜配送机器人,其特征在于:所述挂接支杆的一端与挂接立杆驱动连接或枢转连接,所述挂接支杆的另一端通过伸缩杆与挂接段驱动连接。
6.根据权利要求1所述的高储存效率生鲜配送机器人,其特征在于:所述挂接支杆上设置有挂钩;
7.根据权利要求1所述的高储存效率生鲜配送机器人,其特征在于:所述取货机构包括设置在所述取货箱内部的位移座,所述位移座上驱动设置有伸缩臂,所述伸缩臂上驱动连接有能相对所述挂接收纳部动作位移的夹爪或翻转挂钩。
8.根据权利要求1所述的高储存效率生鲜配送机器人,其特征在于:所述翻转挂钩的一端与驱动设置在所述伸缩臂上的枢转部驱动连接,所述翻转挂钩的另一端通过所述枢转部能相对所述伸缩臂的上侧翻转。
9.根据权利要求1所述的高储存效率生鲜配送机器人,其特征在于:所述挂接支杆长短交替间隔错位设置在所述挂接立杆上。
10.高储存效率生鲜配送机器人的配送使用方法,其特征在于,采用权利要求1-9中任一权利要求所述的高储存效率生鲜配送机器人,包括以下步骤:
技术总结
本发明公开一种高储存效率生鲜配送机器人及其配送方法,其中高储存效率生鲜配送机器人,包括配送机器人本体,配送机器人本体的下部驱动设置有用于驱动位移或行走的驱动底座,配送机器人本体上设置有收纳箱,收纳箱的一侧设置有与其对接的取货箱,且收纳箱的一侧用过分隔门与取货箱的一侧衔接,取货箱的另一侧设置有取货侧;收纳箱内设置有若干个挂接收纳部,取货箱中设置有能相对挂接收纳部位移动作的取货机构。本发明提供一种高储存效率生鲜配送机器人及其配送方法,对货物的尺寸和形状适应能力强,提升了配送空间的自适应性。
技术研发人员:戴岭,戴华
受保护的技术使用者:苏州得尔达国际物流有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!