铰接车辆的转向角测量方法及测量装置与流程
本发明涉及铰接车辆转弯控制,尤其涉及一种铰接车辆的转向角测量方法及测量装置。
背景技术:
1、现有的铰接车辆转向角在测量时,一般通过安装传感器来进行数据采集。如在铰接车辆的铰接中心安装回转角度传感器,通过铰接车辆的前车架和后车架的相对转动来进行转向角的测量;或在转向油缸安装距离传感器,通过距离传感器检测转向油缸的伸缩长度,再通过计算得出转向角。上述方式对回转角度传感器和距离传感器的安装精度要求较高,导致安装较为复杂。
技术实现思路
1、本发明的目的在于提供一种铰接车辆的转向角测量方法及测量装置,以使铰接车辆的转向角计算更加准确,且对安装要求降低。
2、为达此目的,本发明采用以下技术方案:
3、铰接车辆的转向角测量方法,包括如下步骤:
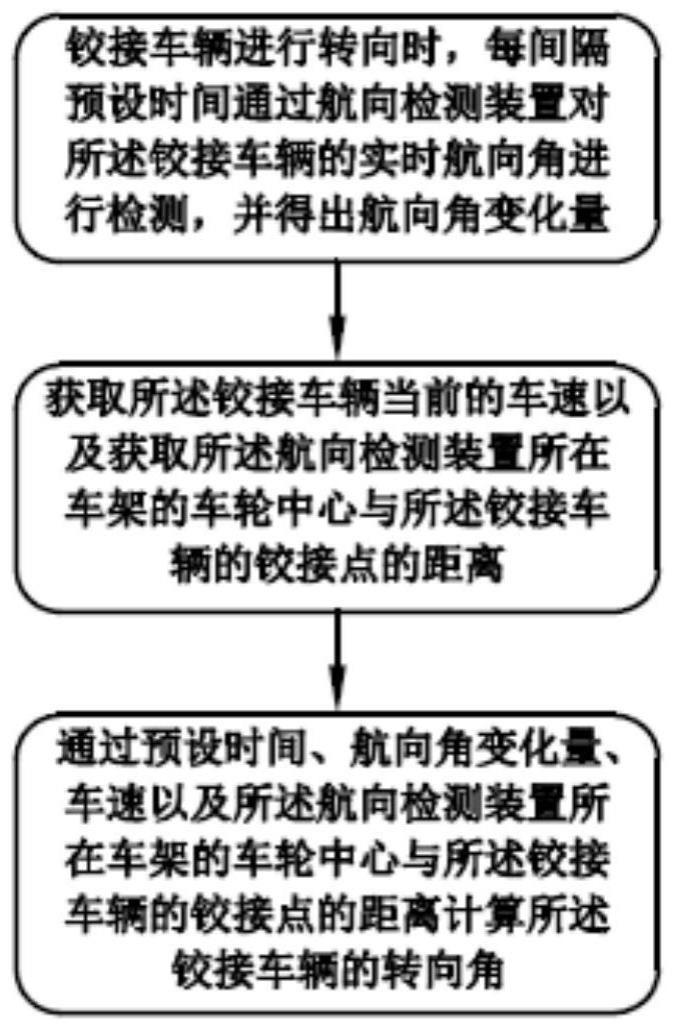
4、铰接车辆进行转向时,每间隔预设时间通过航向检测装置对所述铰接车辆的实时航向角进行检测,并得出航向角变化量;
5、获取所述铰接车辆当前的车速以及获取所述航向检测装置所在车架的车轮中心与所述铰接车辆的铰接点的距离;
6、通过预设时间、航向角变化量、车速以及所述航向检测装置所在车架的车轮中心与所述铰接车辆的铰接点的距离计算所述铰接车辆的转向角。
7、作为一种可选方案,所述铰接车辆包括相互铰接的前车架和后车架,所述航向检测装置设置于所述前车架或所述后车架上,所述铰接车辆的转向角测量方法具体为:
8、预先定义坐标系;
9、所述铰接车辆进行转向时,所述航向检测装置对所述前车架或所述后车架的实时航向角进行检测,得到所述前车架或所述后车架在前一时刻t1的前一航向角φ1,在后一时刻t2的后一航向角为φ2,并将前一时刻t1和后一时刻t2做差以得出预设时间t,以及将前一航向角φ1和后一航向角φ2做差以得出航向角变化量φ;
10、获取所述铰接车辆当前的车速v以及获取所述前车架或所述后车架的车轮中心与所述前车架和所述后车架的铰接点的距离l;
11、通过预设时间t、航向角变化量φ、车速v以及距离l计算所述铰接车辆的转向角θ。
12、作为一种可选方案,所述铰接车辆的转向角θ=2arctan[(ltanφ)/(vt)]。
13、作为一种可选方案,所述航向检测装置为rtk,所述rtk能够检测所述前车架或所述后车架的实时航向角,同时所述rtk还能检测所述铰接车辆的车速。
14、作为一种可选方案,所述rtk包括固定站、第一移动端和第二移动端,所述固定站固定于地面,所述第一移动端和所述第二移动端均设置于所述前车架或所述后车架,所述铰接车辆的实时航向角的检测过程为:
15、以所述固定站为原点建立所述坐标系,根据前一时刻t1和后一时刻t2的所述第一移动端以及所述第二移动端的gps位置,得到在前一时刻t1的所述第一移动端和所述第二移动端相对所述固定站的坐标位置,以及在后一时刻t2的所述第一移动端和所述第二移动端相对所述固定站的坐标位置;
16、通过在前一时刻t1的所述第一移动端和所述第二移动端的坐标位置得出所述前车架或所述后车架在前一时刻t1时刻下的实时航向角φ1,以及在后一时刻t2的所述第一移动端和所述第二移动端的坐标位置得出所述前车架或所述后车架在后一时刻t2时刻下的实时航向角φ2。
17、作为一种可选方案,通过所述第一移动端和所述第二移动端在前一时刻的坐标位置确定所述铰接车辆的前一位置,以及所述第一移动端和所述第二移动端在后一时刻的坐标位置确定所述铰接车辆的后一位置,然后将所述铰接车辆的前一位置与后一位置做差得出所述铰接车辆的移动距离,再将移动距离与预设时间做比值即得到所述铰接车辆的车速。
18、作为一种可选方案,所述航向检测装置为imu,所述imu能够检测所述铰接车辆的实时航向角。
19、作为一种可选方案,所述铰接车辆的车速由霍尔传感器或轮速计检测得出。
20、作为一种可选方案,当通过所述霍尔传感器获取车速时,所述霍尔传感器设置于所述铰接车辆的变速器的输出轴;当通过所述轮速计获取车速时,所述轮速计设置于所述铰接车辆的轮胎。
21、铰接车辆的转向角测量装置,包括上述任一方案中所述的铰接车辆的转向角测量方法。
22、本发明的有益效果:
23、本发明提供的一种铰接车辆的转向角测量方法,在铰接车辆转弯时,通过航向检测装置每隔预设时间对铰接车辆的实时航向角进行检测,并得出航向角变化量,且同时获取铰接车辆的车速以及航向检测装置所在铰接车辆的车架的车轮中心与铰接车辆的铰接点的距离,再通过上述数据进行计算以得出铰接车辆的转向角。该铰接车辆的转向角测量方法避免了使用传感器来获取转向角,而是通过铰接车辆的航向角和车速直接计算出转向角,计算过程简单,且计算精度高。
技术特征:
1.铰接车辆的转向角测量方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的铰接车辆的转向角测量方法,其特征在于,所述铰接车辆包括相互铰接的前车架(1)和后车架(2),所述航向检测装置设置于所述前车架(1)或所述后车架(2)上,所述铰接车辆的转向角测量方法具体为:
3.根据权利要求2所述的铰接车辆的转向角测量方法,其特征在于,所述铰接车辆的转向角θ=2arctan[(ltanφ)/(vt)]。
4.根据权利要求2或3所述的铰接车辆的转向角测量方法,其特征在于,所述航向检测装置为rtk装置,所述rtk装置能够检测所述前车架(1)或所述后车架(2)的实时航向角,同时所述rtk装置还能检测所述铰接车辆的车速。
5.根据权利要求4所述的铰接车辆的转向角测量方法,其特征在于,所述rtk装置包括固定站、第一移动端和第二移动端,所述固定站固定于地面,所述第一移动端和所述第二移动端均设置于所述前车架(1)或所述后车架(2),所述铰接车辆的实时航向角的检测过程为:
6.根据权利要求5所述的铰接车辆的转向角测量方法,其特征在于,通过所述第一移动端和所述第二移动端在前一时刻的坐标位置确定所述铰接车辆的前一位置,以及所述第一移动端和所述第二移动端在后一时刻的坐标位置确定所述铰接车辆的后一位置,然后将所述铰接车辆的前一位置与后一位置做差得出所述铰接车辆的移动距离,再将移动距离与预设时间做比值即得到所述铰接车辆的车速。
7.根据权利要求1所述的铰接车辆的转向角测量方法,其特征在于,所述航向检测装置为imu,所述imu能够检测所述铰接车辆的实时航向角。
8.根据权利要求1所述的铰接车辆的转向角测量方法,其特征在于,所述铰接车辆的车速由霍尔传感器或轮速计检测得出。
9.根据权利要求8所述的铰接车辆的转向角测量方法,其特征在于,当通过所述霍尔传感器获取车速时,所述霍尔传感器设置于所述铰接车辆的变速器的输出轴;当通过所述轮速计获取车速时,所述轮速计设置于所述铰接车辆的轮胎。
10.铰接车辆的转向角测量装置,其特征在于,采用权利要求1-9任一项所述的铰接车辆的转向角测量方法。
技术总结
本发明属于铰接车辆转弯控制技术领域,公开了一种铰接车辆的转向角测量方法及测量装置。铰接车辆的转向角测量方法,包括如下步骤:铰接车辆进行转向时,每隔预设时间通过航向检测装置对铰接车辆的实时航向角进行检测,并计算出航向角变化量;同时获取铰接车辆的当前的车速以及获取航向检测装置所在车架的车轮中心与铰接车辆的铰接点的距离;通过预设时间、航向角变化量、车速以及航向检测装置所在车架的车轮中心与铰接车辆的铰接点的距离来计算铰接车辆的转向角。该铰接车辆的转向角测量方法避免了使用传感器来获取转向角,而是通过铰接车辆的航向角和车速直接计算出转向角,计算过程简单,且计算精度高。
技术研发人员:金忠,孙金泉,刘丽丽
受保护的技术使用者:广西柳工机械股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!