一种多模态操作型足式巡检机器人及运动控制方法与流程
本发明涉及电力巡检机器人控制,尤其涉及一种多模态操作型足式巡检机器人及运动控制方法。
背景技术:
1、随着电力行业的快速发展,变电站巡检机器人已经成为电力巡检领域的研究热点之一。变电站巡检机器人具有自主性、高效性、安全性等优势,可以有效地解决人工巡检存在的安全、工作效率低等问题。变电站巡检机器人可自主完成变电站各种设备的巡检,包括变压器、开关柜、断路器等。目前地面移动式智能巡检机器人能够适用于室内室外两种环境,应用较为广泛。
2、地面移动式智能巡检机器人又根据机器人本体的形式分为轮式、履带式和足式三种典型结构,其实轮式机器人本体具有较高的运动效率,目前在变电站巡检中应用较多,但轮式机器人的环境适应性较差;履带式机器人本体能够克服一定的复杂环境,但运行过程中存在较大的震动,对搭载的仪器设备有较大的影响;相比其他两种类型的机器人本体,足式机器人本体能够适应复杂环境下智能巡检任务,满足变电站室内室外的多变环境,具有更高的灵活性及便捷性,可更大程度代替人工巡检作业。随着巡检任务越来越复杂,部分的传感器设备要求接近甚至贴靠检测对象,如局放传感器等,因此,仅通过足式巡检机器人本体搭载传感器已经无法满足当前的任务需求。除此以外,除了搭载传感器,足式巡检机器人常常也会需要进行一些操作性的工作。与此同时,当前的足式巡检机器人主要是采用四足型结构分布,每个腿部均为2自由度或3自由度,其转弯步态均是在动态运动过程中实现,不利于足式巡检机器人的原地任务操作。
3、目前,足式巡检机器人的运动控制方法主要分为两种,一种是基于模型的反馈控制方法,另一种是基于中央模式发生器(cpg)的运动控制方法。相比于前一种方法,基于cpg的运动控制方法无需建立足式巡检机器人的复杂模型,调整参数较少,能够实现节律性运动步态,并根据具体的感知反馈调节cpg的输入信号,使得足式巡检机器人能够适应复杂的地形环境。但是,一些cpg神经网络主要是单层级结构,多种感知反馈信号均耦合在一起,不利于输出信号的调节。
4、因此,亟待发明设计一种多模态操作型足式巡检机器人及多层cpg运动控制方法,能够实现足式巡检机器人的灵活稳定运动控制。
技术实现思路
1、本发明所要解决的技术问题在于,克服现有技术在智能巡检机器人在适应复杂多变环境和操作性较弱等方面的缺陷和不足,提供一种多模态操作型足式巡检机器人及多层cpg运动控制方法。该发明不仅能够实现智能巡检机器人具备四自由度机械腿,实现腿部的方向调整,使得机器人能够适应复杂多变环境,还能够具有较强的操作能力。本发明设计的多层cpg运动控制方法能够实现多传感器数据反馈,同时能够实现智能巡检机器人多自由度运动的协调控制。
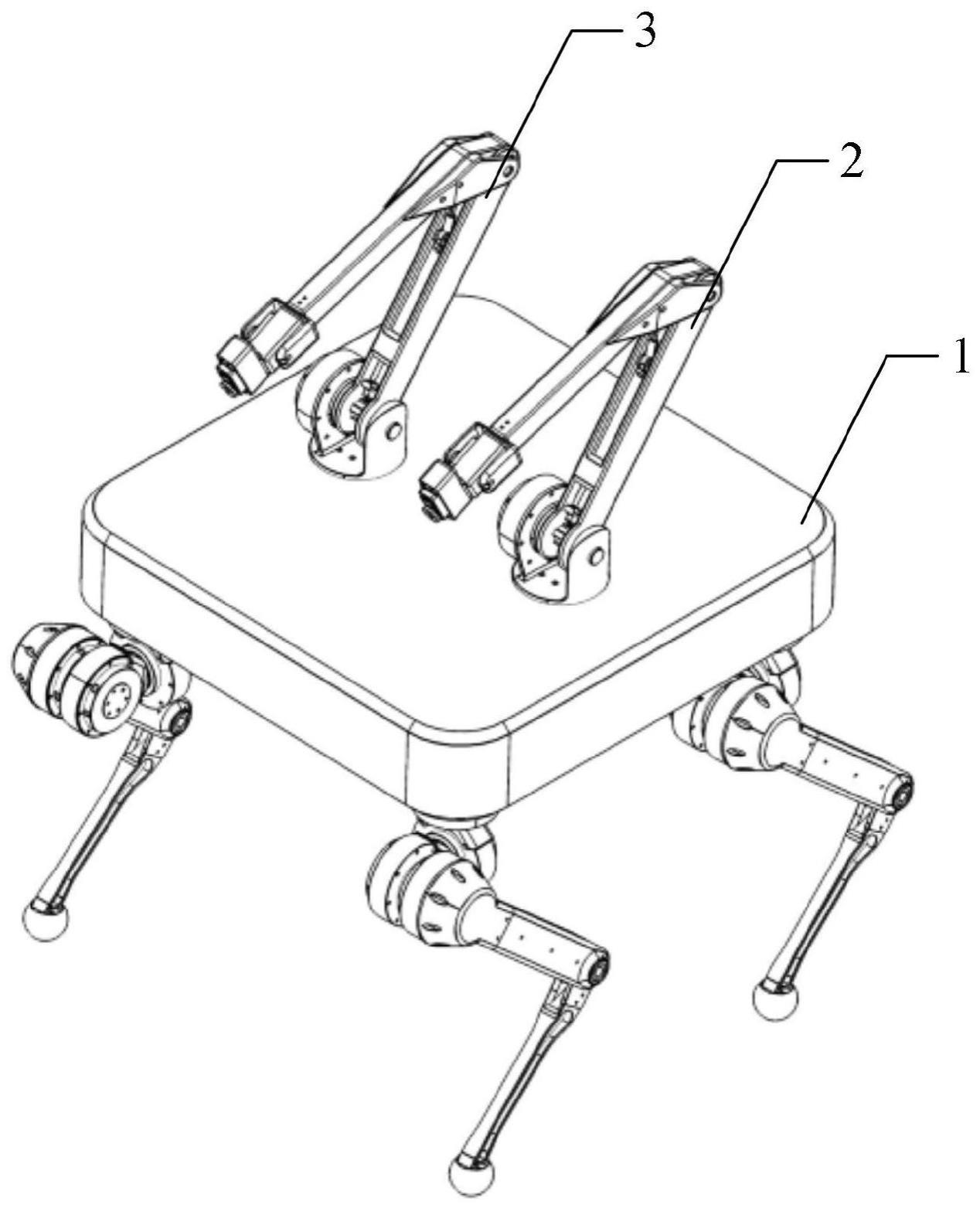
2、为实现上述目的,本发明提供如下技术方案:一种多模态操作型足式巡检机器人,包括左侧机械臂、右侧机械臂和四足移动机器人本体,其中左侧机械臂、右侧机械臂采用同构结构,均固定在四足移动机器人本体上,左侧机械臂、右侧机械臂在执行任务时可以进行协作,共同完成目标任务。相比与单机械臂,双机械臂协作既可以提高作业效率,又提高设备的任务操作性。
3、四足移动机器人本体主要包含机体以及左前机械腿、右前机械腿、左后机械腿、右后机械腿。其中机体内部为中空结构,可以安装工控机、电机驱动器、传感器等设备,从而实现复杂的变电站巡检任务。机体上部主要设置左侧机械臂、右侧机械臂安装位置孔,左侧机械臂、右侧机械臂通过螺丝固定安装在相应位置。机体底部主要设置有四个机械腿安装位置,左前机械腿、右前机械腿、左后机械腿、右后机械腿安装在机体底部的固定位置,左前机械腿、右前机械腿、左后机械腿、右后机械腿均具有四个关节,分别是偏转髋关节、横滚髋关节、俯仰髋关节和膝关节。
4、所述左前机械腿、右前机械腿、左后机械腿、右后机械腿均具有相同结构部件,其中左前机械腿和左后机械腿具有相同机械结构,右前机械腿和右后机械腿具有相同机械结构,左前机械腿、右前机械腿、左后机械腿、右后机械腿中均包含偏转髋关节驱动电机、电机连接件一、横滚髋关节驱动电机、电机连接件二、俯仰髋关节驱动电机、膝关节驱动电机、髋关节外壳、大腿连杆外壳、大腿连杆、膝关节旋转轴、小腿连杆、同步带、球形足端。所述偏转髋关节驱动电机和横滚髋关节驱动电机通过连接件一进行固定连接,横滚髋关节驱动电机和俯仰髋关节驱动电机通过连接件二进行固定连接,连接件一和连接件二为相同结构,均为“八”字形,其中连接件一的“八”字形的底端与偏转髋关节驱动电机的输出轴固定连接,连接件一的“八”字形的两端与横滚髋关节驱动电机的外框架固定连接。连接件二的“八”字形的底端与横滚髋关节驱动电机的输出轴固定连接,连接件二的“八”字形的两端与俯仰髋关节驱动电机的外框架固定连接,并保持俯仰髋关节驱动电机的输出轴朝向机体左侧方向。俯仰髋关节驱动电机的输出轴与膝关节驱动电机的外框架固定连接,髋关节外壳套装在膝关节驱动电机的外框架上,大腿连杆的一端通过螺丝固定安装在膝关节驱动电机的外框架上,膝关节驱动电机的输出轴固定同步带轮,大腿连杆的另一端通过膝关节旋转轴与小腿连杆的一端连接在一起,小腿连杆可以围绕膝关节旋转轴旋转,小腿连杆的一端设置有同步带轮,小腿连杆的不同步带轮与膝关节驱动电机的输出轴固定的同步带轮通过同步带实现传动,大腿连杆外壳、髋关节外壳以及大腿连杆将同步带、同步带轮包在中间,防止灰尘等影响传动。小腿连杆的另一端固定安装球形足端,能够适应不同的地面环境。偏转髋关节驱动电机、横滚髋关节驱动电机、俯仰髋关节电机驱动电机、膝关节驱动电机均采用驱控一体化的盘式伺服电机。所述右前机械腿和右后机械腿具有相同机械结构,与所述左前机械腿和右前机械腿成镜像结构。区别在于俯仰髋关节驱动电机的输出轴朝向机体右侧方向。
5、四足移动机器人本体的左前机械腿、右前机械腿、左后机械腿、右后机械腿具有四个自由度,分别可以围绕左前机械腿、右前机械腿、左后机械腿、右后机械腿中的偏转髋关节驱动电机轴线进行旋转。当多模态操作型足式巡检机器人需要横向移动式,本发明的多模态操作型足式巡检机器人只需要控制四足移动机器人本体的左前机械腿、右前机械腿、左后机械腿、右后机械腿同时围绕左前机械腿、右前机械腿、左后机械腿、右后机械腿中的偏转髋关节驱动电机轴线进行旋转,使得左前机械腿、右前机械腿、左后机械腿、右后机械腿的朝向为多模态操作型足式巡检机器人的运动方向。当左前机械腿、右前机械腿、左后机械腿、右后机械腿的朝向为斜线时,也可以使得多模态操作型足式巡检机器人沿着左前机械腿、右前机械腿、左后机械腿、右后机械腿的朝向移动,因此本发明的多模态操作型足式巡检机器人具有全向移动功能。
6、为了实现多感知数据的融合到运动控制系统中,本发明中的运动控制方法中是基于多层cpg的运动控制方法,其将cpg神经网络分为节律神经元层、模式神经元层和运动神经元层。其中节律神经元层主要是协调多模态操作型足式巡检机器人的四肢运动相位,如实现行走步态、对角小跑步态,模式神经元层主要是协调多模态操作型足式巡检机器人各个腿内部四个关节的运动相位,形成不同足端轨迹,从而实现越障等功能,而运动神经元层是将相位信号转换为关节的控制轨迹信号。
7、由于多模态操作型足式巡检机器人在运动过程中,会面对不同的地形环境,根据传感器的感知数据实时调整当前的运动步态,如根据不同的地形选择不同的运动步态,地形较平坦的情况下采用对角小跑步态,提高多模态操作型足式巡检机器人的运行速度;地形较崎岖的情况下采用行走步态,降低多模态操作型足式巡检机器人的运行速度,提升机器人的运动稳定性;同时多模态操作型足式巡检机器人在面对不同的障碍物或者沟壑,也需要调节足端轨迹,此时根据传感器的信号调节模式发生器层神经元的相位,使得关节动作相位做一定调整,从而改变多模态操作型足式巡检机器人的足端轨迹。为实现以上功能,定义各个层级的数学模型如下:
8、节律神经元层的神经元的数学模型:
9、
10、式中,θri是节律神经元层中间神经元的状态变量,ωri是节律神经元层中间神经元的频率参数,wrij是节律神经元层中间神经元间的耦合权重,是节律神经元层耦合中间神经元间的相位差,ari是节律神经元层中间神经元的输出。
11、模式神经元层的神经元的数学模型:
12、
13、式中,θpi是模式神经元层的中间神经元状态变量,ωpi是模式神经元层中间神经元的频率参数,wpij是模式神经元层中间神经元间的耦合权重,是模式神经元层耦合神经元间的相位差,api是模式发生器层中间神经元的输出。是模式神经元层与节律神经元层的耦合神经元间的相位差,wprij是模式神经元层与节律神经元层的中间神经元间的耦合权重。
14、运动神经元层的神经元的数学模型:
15、
16、式中,zi和yi分别是运动神经元模型的两个状态变量,τ是运动神经元模型的时间常数。α和β是运动神经元模块的比例系数,为了保证运动神经元模型严格阻尼收敛,比例系数满足条件β=α/4。
17、y0=a00
18、y1=a10+a11cos(πx1+b11)+a12cos(2πx1+b12)+a13cos(3πx1+b13)
19、y2=a20+a21cos(πx2+b21)+a22cos(2πx2+b22)+a23cos(3πx2+b23)
20、y3=a30+a31cos(πx3+b31)+a32cos(2πx3+b32)+a33cos(3πx3+b33)+a34cos(4πx3+b34)+a35cos(5πx3+b35)+a36cos(6πx3+b36)+a37cos(7πx3+b37)+a38cos(8πx3+b38)
21、式中,y0,y1,y2,y3分别代表偏转髋关节、横滚髋关节、俯仰髋关节和膝关节的运动轨迹,其中aij及bij为相应的轨迹系数。通过改变轨迹系数可以适应不同的环境。由于偏转髋关节仅需要固定位置,所以只需一个位置变量
22、本发明的有益效果为:
23、一、多模态操作型足式巡检机器人具备双臂操作功能,能够执行更为复杂的功能;
24、二、四自由度机械腿使得多模态操作型足式巡检机器人能够具备全向移动功能;
25、三、多层级cpg运动控制方法能够实现多种传感器信号的解耦,实现多模态操作型足式巡检机器人稳定的运动控制。
- 还没有人留言评论。精彩留言会获得点赞!