新型移动抓取一体式仿生多足机器人
本发明属于仿生机器人,具体涉及一种利用张拉结构实现可变结构的新型移动抓取一体式仿生多足机器人。
背景技术:
1、仿生学是一门综合性边缘学科,具有鲜明的创新性和应用性,其目的在于研究和模拟生物体的结构、功能、行为,为工程技术提供新的设计理念、工作原理和系统构成。仿生多足爬行机器人是一种串并联复合特种机器人,各支撑腿与躯干构成并联机构,各摆动腿与躯干构成串联机构。按照一定的步态规划,支撑腿与摆动腿交替变化可以使仿生多足爬行机器人实现某种稳定的运动。仿生多足爬行机器人具有丰富的步态和冗余的肢体结构,相比传统轮式、履式移动机器人,可利用离散的地面支撑实现非接触式障碍规避、障碍跨越以及不平整地面运动,对复杂地形和不可预知环境变化具有极强的适应性。仿生多足爬行机器人在未来的矿产采掘,星际探测,抢险救灾和军事侦查等领域表现出越来越强的优势。
2、近年来,结合近年来,协作机器人和移动机器人发展迅猛,增速远超传统工业机器人,而复合型机器人是一种集成移动机器人和协作机器人于一身,具备“脚”(agv)、“手”(机械臂)、“眼”(3d视觉)、“脑”(ai算法)的新型机器人,一般由机械臂、移动平台、视觉与末端执行器等组成,旨在令机械臂不再受作业地点的限制,触及更多更广的范围,以满足客户日益增长的柔性化需求。
3、但现有机器人的机械臂均为外加机械臂,这样会增大机器人尺寸与负重,降低其移动性能,控制系统更复杂。因此,设计结构简单、兼顾移动性与作业能力的可变结构多足机器人是新型腿式机器人的研究难点。
技术实现思路
1、本发明的目的是针对现有技术中存在的技术缺陷,提出一种利用张拉结构实现机身变形的新型可变结构仿生多足机器人,通过上抬机器人前部机身与两个腿部,使该两个腿部在髋关节舵机的驱动下实现开合,从而实现物体夹取;同时,未变形的机器人后部机身的四个腿部可驱动机器人自由移动。
2、本发明是这样实现的:
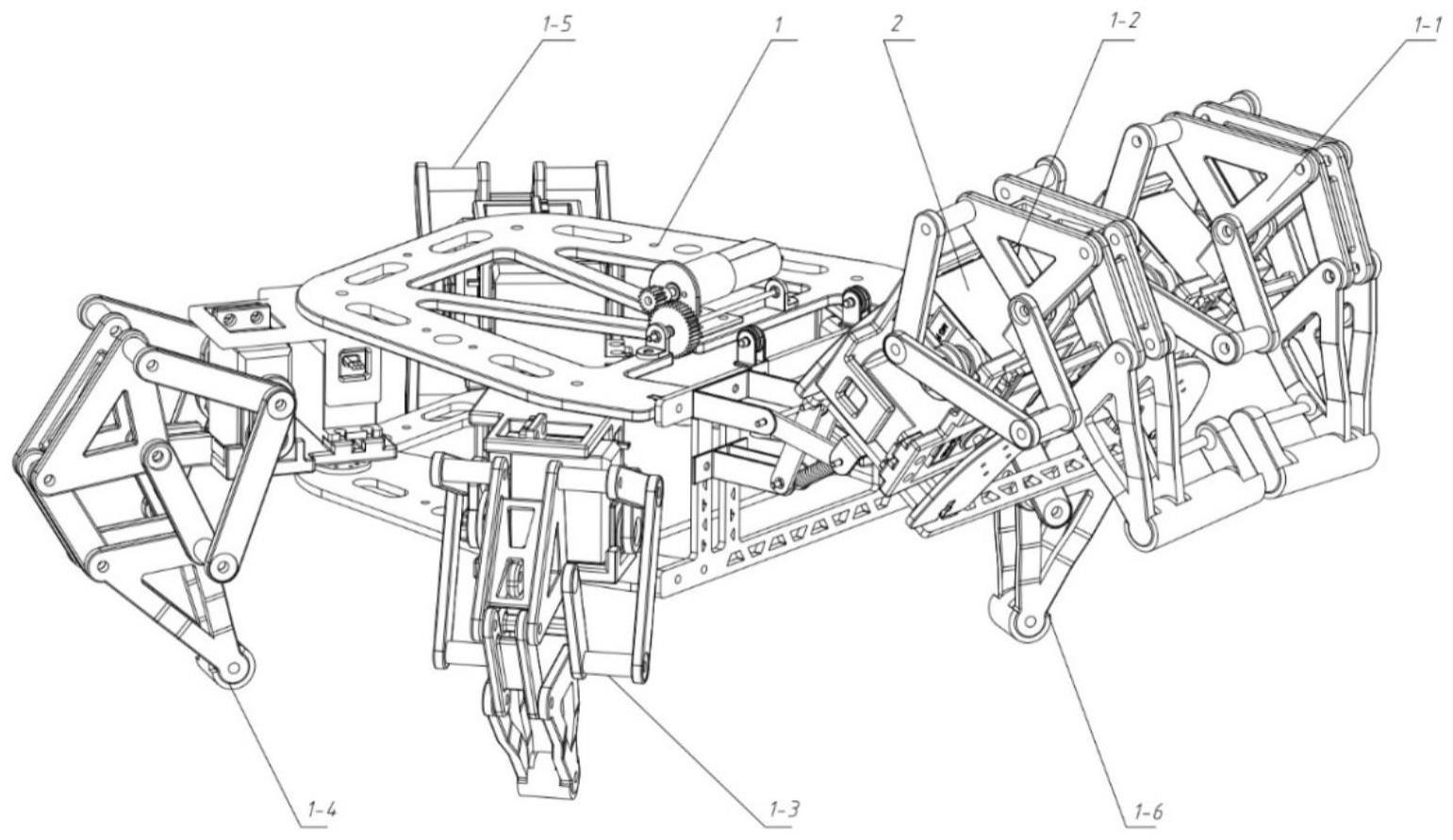
3、一种新型移动抓取一体式仿生多足机器人,,包括前部机身、后部机身,所述前部机身和后部机身通过具有变形、复原功能的可抬起变形的张拉结构连接,所述张拉结构的抬起部与驱动丝的一端连接,所述驱动丝的另一端与直流电机驱动旋转的转动轴连接,所述驱动丝受所转动轴驱动拉紧时能使所述张拉结构的抬起部向上抬起变形,在放松时,所述张拉结构的抬起部能在复位弹簧作用下放下复原,所述前部机身与所述张拉结构的抬起部同步动作,从而实现所述前部机身能相对后部机身旋转抬起变形或放下复原;
4、所述前部机身设置两个腿部,所述后部机身设置四个腿部,每个所述腿部具有一个髋关节与一个膝关节,各自由一舵机驱动;
5、机器人移动时,受所述张拉结构的弹性约束,所述前部机身和后部机身处于相对稳定状态,六个腿部采用三足步态或四足步态爬行;机器人处于目标位置时,所述前部机身的两个腿部的膝关节回归零位,两个髋关节左右转动,使前部机身的两个腿部作为机械臂,实现物体抓取功能;
6、抓取物体后通过驱动机构使所述张拉结构变形,带动前部机身旋转上抬,前部机身的两个腿部夹取物体抬离地面,同时后部机身的四个腿部以四足步态移动,实现搬运功能;
7、当机器人夹取物块到达目标地点时,所述驱动机构反向动作使张拉结构复原,使前部机身回到水平位置,前部机身的两个腿部的髋关节向外转动,放置物体,机器人恢复初始状态,六个腿部以三足步态或四足步态移动。
8、所述驱动丝为两根,沿径向方向对称隔开布置;两根驱动丝的一端分别与所述直流电机驱动的齿轮减速机构的转动轴连接,两根驱动丝的另一端与所述张拉结构的抬起部上设置的抬起轴连接。
9、其中,所述齿轮减速机构包括第一齿轮与第二齿轮,所述第一齿轮与所述直流电机的输出轴同轴连接,所述第二齿轮与第一齿轮啮合,所述第二齿轮的直径大于所述第一齿轮的直径;所述第二齿轮与所述转动轴同轴装配。
10、其中,所述转动轴与抬起轴之间设置有滑轮,所述滑轮与所述驱动丝连接,用于所述驱动丝的导向。
11、其中,所述直流电机与个齿轮减速机放置在所述后部机身上。
12、其中,所述张拉结构包括后机身固定部、前机身固定部,所述后机身固定部与所述后部机身固定;所述前机身固定部与所述前部机身固定,所述抬起部的两端各自通过轴件与所述后机身固定部、前机身固定部相连接,所述后机身固定部与所述前机身固定部之间设置所述抬起部复位的复位弹簧。
13、其中,所述前部机身与后部机身所配置的腿部的舵机关节的两侧配置两套连杆结构,前侧采用套筒进行宽度的收窄,兼顾腿部的支撑强度与灵活性。
14、其中,所述前部机身的两个腿部的足端各自设置有一个用于增大夹取范围与摩擦力的夹取物体的支撑板,两个所述支撑板相对布置。
15、其中,机器人采用树莓派控制模块作为控制板,控制六个髋关节与六个膝关节的舵机进行动作;机器人设置有摄像头与超声波模块、语音识别模块,所述超声波模块能够使机器人在探测到前方障碍物时自主转向避障,所述语音识别模块能够满足不便手动控制、操控人数多于控制器数量的场景需求,所述摄像头用于机器人行走时作为双目视觉,能够探测周围环境的三维信息,并实时传输回操控端。
16、其中,所述摄像头与超声波模块放置在前部机身上,所述控制板与语音识别模块放置在机器人后部机身上。
17、本发明的新型移动抓取一体式仿生多足机器人,不需要搬运作业时,直流电机未启动,机器人前部机身、后部机身在张拉机构下侧的弹簧作用下保持相对稳定,六个腿部移动,一侧的前后两个腿部与另一侧的中间腿部组成一组,另外三条腿部组成一组,两组腿部交替前进,一组腿部通过膝关节舵机控制足端上抬,髋关节舵机控制腿部整体向前转动,膝关节舵机控制足端下落,在髋关节舵机控制该组腿部整体向后转动时,另一组腿部的膝关节舵机控制足端上抬,如此反复交替,实现三足步态的前进和后退,同理可实现三足步态的左转和右转。
18、本发明的新型移动抓取一体式仿生多足机器人,需要搬运作业时,直流电机启动,通过驱动丝将张拉机构向上翻转,前部机身上抬,前部机身的两个腿部的膝关节舵机锁死,髋关节舵机左右摆动,实现前部机身的两个腿部的开合运动,部机身的两个腿部实现物体的抓取与放置功能,后部机身的四个腿部以一侧的两个腿部为一组,一组膝关节舵机控制足端上抬,髋关节舵机控制腿部整体向前转动,膝关节舵机控制足端下落,在髋关节舵机控制该组腿部整体向后转动时,另一组腿部的膝关节舵机上抬,如此反复交替,实现四足步态的前进和后退,同理可实现三足步态的左转和右转,前后六个腿部相互配合实现物体的搬运。
19、本发明的新型移动抓取一体式仿生多足机器人,当需要将夹取的物体放置时,直流电机反向转动,缓慢放丝,同时张拉结构下侧的弹簧收拉,将机器人前部机身拉回水平位置,与后部机身保持相对稳定,前两足髋关节张开转动,放置物体,机器人整体恢复六足移动的结构。
20、本发明的新型移动抓取一体式仿生多足机器人,其设计遵循自然界多足爬行生物的运动规律,充分利用腿部的关节机构的自由度,在实现多功能的同时结构简单,利用张拉结构实现机器人较大幅度变形,两个前部机身的腿部能实现机械臂功能,改进了传统仿生多足机器人,使得机器人的应用价值显著提升。
21、本发明的新型移动抓取一体式仿生多足机器人,将前部机身的两个腿部充当机械臂,在不增设特殊手臂式结构的前提下,能够实现物体的抓取与搬运功能,解决了现有仿生多足机器人功能单一、结构复杂的问题,运用于探查作业,能构成新的探查作业方式。
- 还没有人留言评论。精彩留言会获得点赞!