一种高柔性全向复合作业机器人的制作方法
本发明涉及复合作业机器人,具体涉及一种高柔性全向复合作业机器人。
背景技术:
1、所谓全向型agv机器人,也就是能够全向运行,如90°转向、180°原地掉头、360°原地旋转、横向移动等运行方式,可用于一些复杂环境。
2、首先全向型agv机器人采用舵轮驱动,较于传统agv小车差速控制方式,舵轮集成化高适配性强,配合步进驱动器或伺服驱动器,可快速部署agv移动式机器人。而且舵轮驱动可以全向运动转向更精准,不需要很麻烦的算法,路径连续易于控制。
3、电脑大平面产品,例如笔记本电脑壳体、显示玻璃等,通过移动协作机器人代替人工在各个设备之间传输,不仅可以提高工厂的生产效率,而且可以完全实现数字化生产,监控每一个大平面产品的生产过程,保证产品的品质。移动协作机器人又叫复合作业机器人,针对电脑大平面产品,复合作业机器人的抗震率要求较高,然而,现有的复合作业机器人受移动底盘的技术制约,抗震率较差,其悬挂运行稳定性较差,且空间体积较大,更不利于狭窄空间使用,难以适应于大平面产品的生产加工需求。
技术实现思路
1、为了克服现有技术中存在的缺点和不足,本发明的目的在于提供一种高柔性全向复合作业机器人。
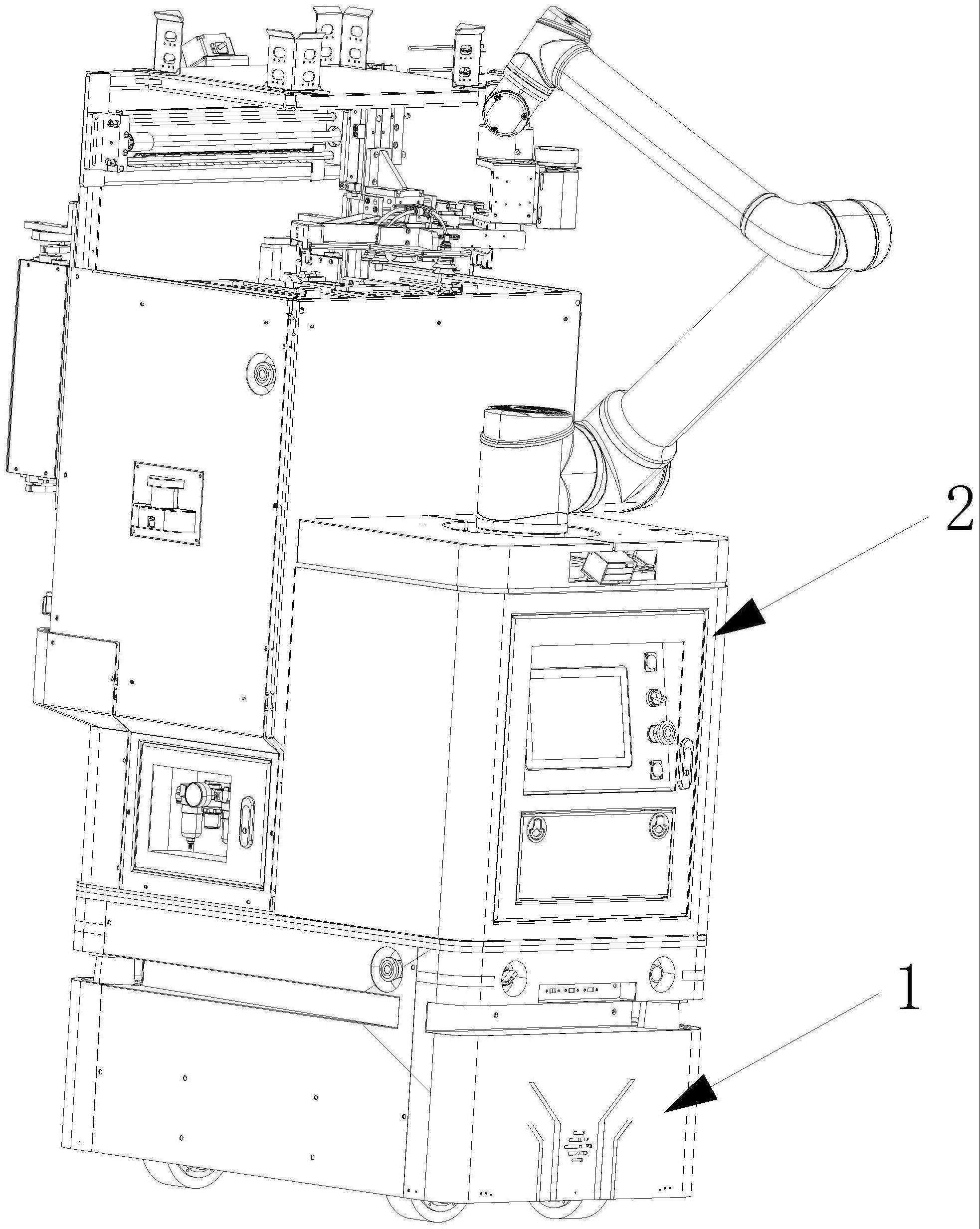
2、本发明的目的通过下述技术方案实现:一种高柔性全向复合作业机器人,包括移动底盘、以及连接于移动底盘顶部的作业机组,所述移动底盘包括与作业机组连接的作业安装台、与作业安装台连接的移动支座、容设于移动支座的转动驱动机构、以及与转动驱动机构的输出端传动连接并安装于移动支座底部的舵轮悬挂机构,所述舵轮悬挂机构具有舵轮本体,所述舵轮本体为轮毂电机。
3、优选的,所述舵轮悬挂机构包括固定连接于移动支座底部的中空悬挂台、固定连接于中空悬挂台并与所述转动驱动机构的输出端传动连接的中空旋转台、与中空旋转台的转盘连接的旋转座、升降设置于旋转座的两侧的舵轮安装座、以及连接旋转座和舵轮安装座的调节减震组件,所述舵轮本体转动设置于舵轮安装座。
4、优选的,所述调节减震组件包括螺栓、调节螺母、以及夹设于所述旋转座和舵轮安装座之间的压缩弹簧,所述旋转座开设有第一通孔,所述舵轮安装座开设有第二通孔,所述螺栓依次贯穿第一通孔、压缩弹簧、第二通孔并与调节螺母螺纹配合。
5、优选的,所述舵轮悬挂机构还包括竖向连接于所述旋转座的外侧壁的直线导轨、以及滑动连接于直线导轨并与所述舵轮安装座固定连接的滑块。
6、优选的,所述旋转转座的中部开设有穿线孔,所述中空旋转台的中部、中空悬挂台的中部和穿线孔依次连通形成用于供线路穿至轮毂电机的通道。
7、优选的,所述转动驱动机构包括容设于移动支座的第一伺服电机、以及与第一伺服电机的输出端连接的减速机,所述减速机的输出端与中空旋转台传动连接。
8、优选的,所述移动底盘还包括第一激光测距传感器和第二激光测距传感器,所述第一激光测距传感器和第二激光测距传感器分别连接于移动支座的对角处。
9、优选的,所述移动底盘还包括围设于所述移动支座的外壳体,所述第一激光测距传感器和第二激光测距传感器均贯穿所述外壳体,所述外壳体靠近第一激光测距传感器的两侧面设置有用于扩大第一激光测距传感器的发散激光范围的第一l型让位槽,所述外壳体靠近第二激光测距传感器的两侧面设置有用于扩大第二激光测距传感器的发散激光范围的第二l型让位槽。
10、优选的,所述移动底盘还包括连接于所述移动支座的底部的底座,所述底座的中部设置有电池容置槽体。
11、优选的,所述作业机组包括与所述作业安装台连接的工作台、与工作台连接的机械手支架、连接于机械手支架顶部的工业协作机械手、与工业协作机械手的输出端连接的取放料机构、与工作台连接的输送支架、连接于输送支架靠近机械手支架一侧的第一升降机构、与第一升降机构的输出端连接的第一托料盘、连接于输送支架并与第一托料盘对应配合的第一同步带输送机、连接于输送支架靠近机械手支架一侧的第二升降机构、与第二升降机构的输出端连接的第二托料盘、以及连接于输送支架并与第二托料盘对应配合的第二同步带输送机,所述取放料机构用于取放加工物料或取放承载加工物料的治具。
12、本发明的有益效果在于:本发明的高柔性全向复合作业机器人,其移动底盘采用了移动支座和作业安装台承载作业机组,在移动支座中容设转动驱动机构,利用转动驱动机构驱动舵轮悬挂机构旋转,实现舵轮悬挂机构的原地旋转,且舵轮悬挂机构的舵轮本体为轮毂电机,实现了舵轮悬挂机构的前进/后退,轮毂电机比传统的外置电机驱动舵轮结构更精巧、回转半径更小、更灵活,相比传统的移动底盘,本发明的移动底盘结构设计更精巧,更有利于节省空间体积,更能适应狭窄空间,且能满足抗震率的要求,适应于大平面产品的加工生产制造。
技术特征:
1.一种高柔性全向复合作业机器人,包括移动底盘、以及连接于移动底盘顶部的作业机组,其特征在于:所述移动底盘包括与作业机组连接的作业安装台、与作业安装台连接的移动支座、容设于移动支座的转动驱动机构、以及与转动驱动机构的输出端传动连接并安装于移动支座底部的舵轮悬挂机构,所述舵轮悬挂机构具有舵轮本体,所述舵轮本体为轮毂电机。
2.根据权利要求1所述的一种高柔性全向复合作业机器人,其特征在于:所述舵轮悬挂机构包括固定连接于移动支座底部的中空悬挂台、固定连接于中空悬挂台并与所述转动驱动机构的输出端传动连接的中空旋转台、与中空旋转台的转盘连接的旋转座、升降设置于旋转座的两侧的舵轮安装座、以及连接旋转座和舵轮安装座的调节减震组件,所述舵轮本体转动设置于舵轮安装座。
3.根据权利要求2所述的一种高柔性全向复合作业机器人,其特征在于:所述调节减震组件包括螺栓、调节螺母、以及夹设于所述旋转座和舵轮安装座之间的压缩弹簧,所述旋转座开设有第一通孔,所述舵轮安装座开设有第二通孔,所述螺栓依次贯穿第一通孔、压缩弹簧、第二通孔并与调节螺母螺纹配合。
4.根据权利要求2所述的一种高柔性全向复合作业机器人,其特征在于:所述舵轮悬挂机构还包括竖向连接于所述旋转座的外侧壁的直线导轨、以及滑动连接于直线导轨并与所述舵轮安装座固定连接的滑块。
5.根据权利要求2所述的一种高柔性全向复合作业机器人,其特征在于:所述旋转转座的中部开设有穿线孔,所述中空旋转台的中部、中空悬挂台的中部和穿线孔依次连通形成用于供线路穿至轮毂电机的通道。
6.根据权利要求2所述的一种高柔性全向复合作业机器人,其特征在于:所述转动驱动机构包括容设于移动支座的第一伺服电机、以及与第一伺服电机的输出端连接的减速机,所述减速机的输出端与中空旋转台传动连接。
7.根据权利要求1所述的一种高柔性全向复合作业机器人,其特征在于:所述移动底盘还包括第一激光测距传感器和第二激光测距传感器,所述第一激光测距传感器和第二激光测距传感器分别连接于移动支座的对角处。
8.根据权利要求7所述的一种高柔性全向复合作业机器人,其特征在于:所述移动底盘还包括围设于所述移动支座的外壳体,所述第一激光测距传感器和第二激光测距传感器均贯穿所述外壳体,所述外壳体靠近第一激光测距传感器的两侧面设置有用于扩大第一激光测距传感器的发散激光范围的第一l型让位槽,所述外壳体靠近第二激光测距传感器的两侧面设置有用于扩大第二激光测距传感器的发散激光范围的第二l型让位槽。
9.根据权利要求1所述的一种高柔性全向复合作业机器人,其特征在于:所述移动底盘还包括连接于所述移动支座的底部的底座,所述底座的中部设置有电池容置槽体。
10.根据权利要求1所述的一种高柔性全向复合作业机器人,其特征在于:所述作业机组包括与所述作业安装台连接的工作台、与工作台连接的机械手支架、连接于机械手支架顶部的工业协作机械手、与工业协作机械手的输出端连接的取放料机构、与工作台连接的输送支架、连接于输送支架靠近机械手支架一侧的第一升降机构、与第一升降机构的输出端连接的第一托料盘、连接于输送支架并与第一托料盘对应配合的第一同步带输送机、连接于输送支架靠近机械手支架一侧的第二升降机构、与第二升降机构的输出端连接的第二托料盘、以及连接于输送支架并与第二托料盘对应配合的第二同步带输送机,所述取放料机构用于取放加工物料或取放承载加工物料的治具。
技术总结
本发明涉及复合作业机器人技术领域,具体涉及一种高柔性全向复合作业机器人,包括移动底盘和作业机组,移动底盘包括与作业机组连接的作业安装台、与作业安装台连接的移动支座、容设于移动支座的转动驱动机构、以及与转动驱动机构的输出端传动连接并安装于移动支座底部的舵轮悬挂机构,舵轮悬挂机构具有舵轮本体,舵轮本体为轮毂电机,利用转动驱动机构驱动舵轮悬挂机构旋转,实现舵轮悬挂机构的原地旋转,且舵轮悬挂机构的舵轮本体为轮毂电机,实现了舵轮悬挂机构的前进/后退,相比传统的移动底盘,本发明的移动底盘结构设计更精巧,更有利于节省空间体积,更能适应狭窄空间,且能满足抗震率的要求,适应于大平面产品的加工生产制造。
技术研发人员:贺喜,宋文霞,袁明,鲁同双
受保护的技术使用者:广东爱吉尔机器人科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!