一种智能巡检系统及其使用方法与流程
本技术涉及智能巡检系统,更具体地说,涉及一种智能巡检系统及其使用方法。
背景技术:
1、为了保障配电机房内电力设备的正常工作,需要定时对配电机房进行巡检工作,为了避免人工巡视时产生触电等危险,目前多使用能够远程操控的智能巡检车代替传统人工进行配电机房的巡视工作,保证了巡检效率的同时,又能够避免工作人员直接与电力设备进行接触;
2、现有技术公开号为cn112462789a文献提供的变电站智能巡检机器人,包括图像采集模块、模型识别模块、上位机通讯模块;所述图像采集模块包括针对导航路径局部单独设置的激光扫描装置和rgb-d传感器。本发明中,利用图像处理技术的特征提取,并通过人工先验知识对特征进行定义,建立针对障碍物识别特征库模型,并对常见障碍物的物理属性进行分析,如尺寸、形状、颜色、纹理,从而获取采集信息,再通过bp神经网络模型实现分类匹配,使得机器人本身的越障能力、本身几何特性,对目标的可跨越性进行判定,最终实现对部分障碍物的容忍,如对杂草、小块碎石的跨越,提升机器人对障碍物的敏感程度,做到各种运动速度条件下的灵活避障,但配电机房地面每间隔一段距离便会配置一段线缆,以用于配电机房内通电作业,虽然上述专利能够对杂草、小块碎石的跨越,但在对多条线缆进行连续性跨越时,会导致图像采集出现模糊颠簸;
3、而现有技术公开号为cn112776912a文献提供的配电机房智能巡检装置,包括巡检车主体,巡检车主体上安装有主动翻越机构和辅助翻越机构,主动翻越机构包括架板、转动电机、转轮以及若干拨杆,辅助翻越机构包括侧板、活动板以及带轮,带轮套设在履带内,该专利虽然通过控制主动翻越机构进行工作可使主动翻越机构上的转轮带动拨杆从障碍物处进行拨动,进而使巡检车主体的头部能够顺利翻越障碍物,但转轮在带动拨杆旋转对障碍物拨动时,由于拨杆旋转的力,可能会带动线缆对转轮缠绕,导致机体产生磕绊导致机体不稳定,鉴于此,我们提出一种智能巡检系统及其使用方法。
技术实现思路
1、1.要解决的技术问题
2、本技术的目的在于提供一种智能巡检系统及其使用方法,以解决上述背景技术中提出的问题。
3、2.技术方案
4、本技术实施例提供了一种智能巡检系统,包括:
5、连接架;
6、设置于连接架顶部承载架;
7、和,安装于承载架顶部的巡检机器人;
8、以及,设置于连接架底部的两组第一行走轮和两组第二行走轮;
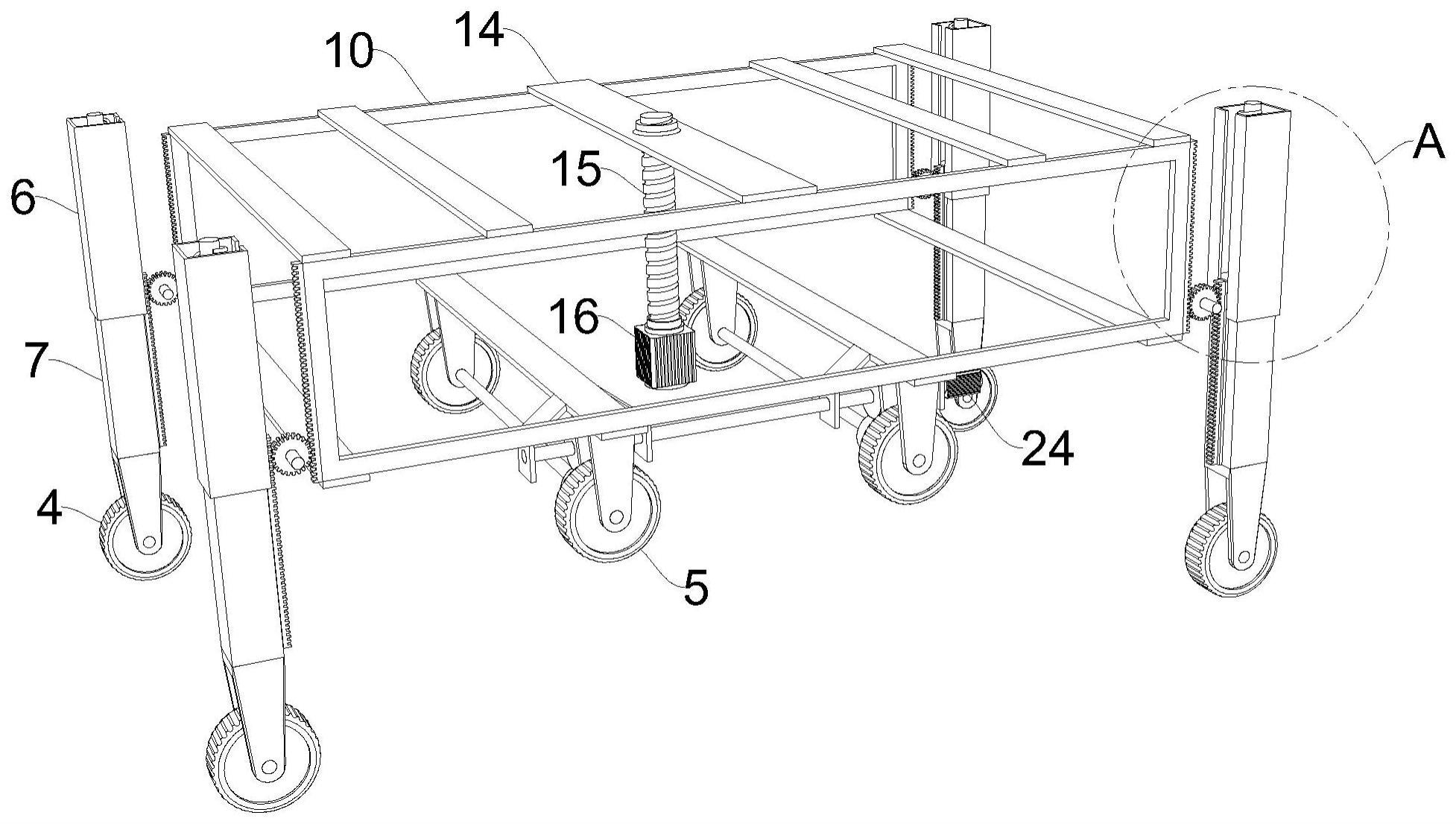
9、伸缩结构,设置于连接架与两组第一行走轮和两组第二行走轮之间,用于驱动第一行走轮和第二行走轮进行伸缩交替运动跨越障碍物。
10、其中所述每组第一行走轮和第二行走轮均由两个平行并排的行走轮体组成,且第一行走轮和第二行走轮沿行进方向交替排列,且伸缩结构带动临近的一组第一行走轮和第二行走轮切换升降动作后,另一组第一行走轮和第二行走轮依次执行升降动作切换,在上述进行交替运动同时驱动导杆同步向上移动带动承载架向上运动。
11、通过采用上述技术方案,驱动第一行走轮和第二行走轮进行交替运动,使第一行走轮和第二行走轮交替性的对障碍物进行跨越,从而躲避地下线缆等障碍物。
12、作为本技术文件技术方案的一种可选方案,所述伸缩结构包括安装于连接架内部四周的导向架,且导向架内滑动连接有伸缩架,所述伸缩架与所述第一行走轮相连接,所述导向架内开设有导向槽,且导向槽内滑动连接有第一齿条,所述第一齿条与所述伸缩架外壁固定连接,所述连接架内部设置有移动架,且移动架的两侧皆安装有第二齿条,所述第一齿条和所述第二齿条之间啮合连接有传动齿轮,且传动齿轮内安装有旋转轴,所述旋转轴的两端皆通过轴承与所述连接架内壁转动连接,所述移动架顶部安装有连接板,且连接板内螺纹连接有螺纹杆,所述连接架底部安装有第一电机,且第一电机的输出轴与螺纹杆相连接。
13、通过采用上述技术方案,通过第一齿条、第二齿条和传动齿轮啮合连接,当螺纹杆旋转驱动连接板进行移动时,第一行走轮和第二行走轮朝向相反的方向移动。
14、作为本技术文件技术方案的一种可选方案,所述移动架的底部延伸至所述连接架的外表面,所述连接架底部的两侧皆开设有与所述连接架相适配的开槽。
15、通过采用上述技术方案,通过开槽的设置,便于移动架穿过,便于第二行走轮对地面支撑。
16、作为本技术文件技术方案的一种可选方案,所述移动架的上下两侧皆安装有多个固定板,且底部多个所述固定板与所述第二行走轮通过行走结构相连接。
17、通过采用上述技术方案,通过固定板的设置,增加了移动架之间的稳定性。
18、作为本技术文件技术方案的一种可选方案,所述第一齿条与第二齿条为上下交错设置,当所述第一齿条向上移动与所述传动齿轮啮合连接时,所述第二齿条向下运动,当所述第一齿条向下移动与所述传动齿轮啮合连接时,所述第二齿条向上运动。
19、通过采用上述技术方案,便于在螺纹杆与连接板螺纹连接时,驱动移动架进行上下移动,从而使得第一行走轮和第二行走轮进行交替运动。
20、作为本技术文件技术方案的一种可选方案,所述连接架内部的四周滑动连接有导杆,且导杆的一端与伸缩架固定连接,另一端与承载架相连接。
21、通过采用上述技术方案,通过导杆的设置,便于驱动承载架向上移动。
22、作为本技术文件技术方案的一种可选方案,所述导杆的外部设置有弹簧,且弹簧的两端分别与连接架和伸缩架固定连接。
23、通过采用上述技术方案,通过弹簧的设置,对伸缩架进行支撑提供了支撑力和稳定性。
24、作为本技术文件技术方案的一种可选方案,所述行走结构包括设置于所述第二行走轮两侧的支撑架,且支撑架与固定板相连接,所述支撑架内通过轴承转动连接有传动轴,且传动轴与第二行走轮固定连接,所述固定板的底部通过轴承转动连接有驱动轴,且驱动轴外部的两侧皆安装有第一斜齿轮,所述第一斜齿轮的外部啮合连接有第二斜齿轮,且第二斜齿轮与传动轴固定连接,所述驱动轴的一端安装有第二电机。
25、通过采用上述技术方案,利用第二电机旋转驱动第一斜齿轮和第二斜齿轮啮合连接,使第二行走轮进行转动,从而跨越障碍物。
26、本技术实施例提供了一种智能巡检系统的使用方法,其步骤如下:
27、s1、避障;
28、驱动第一行走轮和第二行走轮进行交替运动,使第一行走轮和第二行走轮交替性的对障碍物进行跨越;
29、s2、巡检保持;
30、在第一行走轮和第二行走轮进行交替运动同时,驱动导杆同步向上移动,使巡检机器人位置保持稳定高度范围内。
31、3.有益效果
32、本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
33、1、本技术中设置了四组行走轮,并且两组为一个运动跨越单元,在两个运动跨越单元均各自执行完一次升降交替运动后,完成对障碍物的完整跨越,该过程中无需借助拨杆和绳索机构,使得在能够进行稳定前行移动的同时,还能够执行对障碍物的稳定可靠避障。
34、2、本技术通过第一行走轮和第二行走轮进行上下伸缩的交替运动,使第一行走轮和第二行走轮交替性的对障碍物进行跨越,从而躲避地下线缆等障碍物,避免与线缆发生缠绕,提高了巡检机器人的稳定性。
35、3、本技术通过第一齿条、第二齿条和传动齿轮啮合连接,便于在驱动第二行走轮向下移动时,第一行走轮向上进行移动,进行交替性作业,便于对障碍物进行跨越;
36、4、本技术通过导杆与承载架相连接,便于在伸缩架向上进行移动时,带动承载架同步移动,使巡检机器人的位置保持在稳定的高度范围内,便于巡检作业;
37、5、本技术通过行走结构,在第一行走轮进行收缩运动时,第二行走轮与地面接触,通过第二电机旋转驱动第二行走轮转动,便于驱动巡检机器人移动,从而跨越障碍物。
- 还没有人留言评论。精彩留言会获得点赞!