一种仿生轮足腿部结构及轮足式机器人
本发明涉及机器人技术,尤其涉及一种仿生轮足腿部结构及轮足式机器人。
背景技术:
1、现有的轮足式机器人的轮足腿部结构主要分为两种设计结构,第一种是不采用任何旋转裸关节的设计,即腿部末端裸关节只能前后运动;第二种是采用电机直连的模式,通过电机的旋转来实现腿部末端裸关节的旋转。然而发明人发现,这两种设计结构在实现机器人整体转向时,都存在一定的问题。
2、例如,第一种不采用任何旋转裸关节的设计,由于腿部末端只能前后运动,机器人的转向只能设计为需要通过肩关节的旋转来实现。这样会使得运动学算法变得复杂,并且对于机器人的控制也需要更加精细的操作,难度较大。此外,这种设计结构还存在一个问题,就是在机器人行走过程中,如果遇到了阻碍物,机器人将无法通过旋转裸关节来调节轮子方向绕过障碍物,进一步限制了轮足机器人腿部结构的灵活性。
3、而对于采用电机直连的模式,虽然可以实现末端裸关节的旋转,但是电机直连结构将使得腿部末端变得很重很大,电机的扭矩也需要较大,不利于机器人的抬腿动作与整体装置的轻量化和微型化,使得腿部结构灵活性欠佳,同时也不利于机器人整体结构的协调性设计。
技术实现思路
1、为此,本发明的主要目的在于提供一种仿生轮足腿部结构及轮足式机器人,以通过仿桡尺骨旋转腕关节的设计来实现轮足的旋转摆动,以提升轮足腿部结构的灵活性。
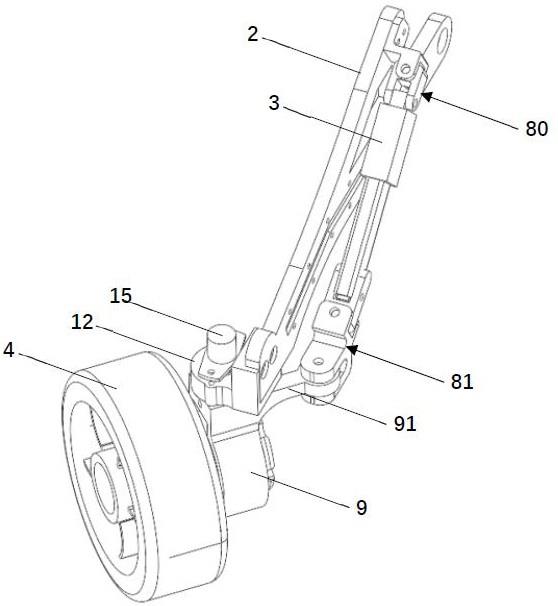
2、为了实现上述目的,根据本发明的第一个方面,提供了一种仿生轮足腿部结构,其包括:小腿连杆,直线驱动器,足端单元,其中所述足端单元包括:轮子,驱动电机,腕关节件,小腿底座,其中驱动电机固定在腕关节件第一侧,驱动电机传动端与轮子连接,所述小腿底座与腕关节件转轴连接,所述腕关节件第二侧向外延伸出舵杆,其中所述小腿连杆第一端向外延伸出支架,所述直线驱动器第一端经第一旋转关节件与小腿连杆支架铰接、第二端经第二旋转关节件与舵杆铰接,所述小腿连杆第二端与小腿底座连接。
3、在可能的优选实施方式中,其中所述腕关节件上设有第一轴孔,且第一轴孔内设有键槽,所述小腿底座上设有第二轴孔,所述小腿底座与腕关节件之间通过防松轴插入第一、第二轴孔内形成转轴连接,其中所述防松轴上设有平键,以与腕关节件第一轴孔内的键槽配接,固定防松轴轴向位置,所述小腿底座第二轴孔顶部盖设有角度传感器,其感测区朝向防松轴的顶部。
4、在可能的优选实施方式中,其中所述腕关节件的第一轴孔处、或小腿底座的第二轴孔处中任一处设有轴承槽,以容纳推力轴承,所述腕关节件与小腿底座经防松轴穿过推力轴承,插入第一、第二轴孔内形成转轴连接。
5、在可能的优选实施方式中,其中所述第一旋转关节件包括:第一关节,第二关节,其中所述第一关节呈类z形,其第一侧设有第一纵向轴叉,第二侧固定在支架上,所述第二关节呈类u形叉状,其内凹一侧设有纵向轴孔,靠近叉头处设有横向轴孔,所述第二关节经纵向轴孔与第一关节的第一纵向轴叉转轴连接,所述第二关节的叉头处经横向轴孔与直线驱动器第一端转轴连接,以在直线驱动器与小腿连杆之间建立两个自由度的铰接。
6、在可能的优选实施方式中,其中所述第二旋转关节件包括:第三关节,第四关节,其中所述第三关节呈类u形叉状,其内凹一侧设有纵向轴孔,靠近叉头处设有横向轴孔,所述第四关节两端分别设有第二纵向轴叉、第三纵向轴叉,且第二纵向轴叉与第三纵向轴叉之间呈倾斜状,所述第四关节件经第二纵向轴叉与第三关节纵向轴孔转轴连接,所述第四关节件经第三纵向轴叉与舵杆转轴连接,所述第三关节经叉头处的横向轴孔与直线驱动器第二端转轴连接,以在直线驱动器与舵杆之间建立三个自由度的铰接。
7、在可能的优选实施方式中,所述的仿生轮足腿部结构,其中还包括:关节电机组,曲柄四连杆机构,其中所述曲柄四连杆机构包括:大腿连杆,大腿辅助连杆,驱动连杆,膝关节连杆,所述大腿连杆及大腿辅助连杆的第一端分别与关节电机组的末端电机定子连接,所述驱动连杆与关节电机组的末端电机转子连接,所述膝关节连杆的第一端与驱动连杆的曲柄转轴连接,所述大腿连杆、大腿辅助连杆、膝关节连杆的第二端分别与小腿连杆的第三端对应位置处转轴连接。
8、在可能的优选实施方式中,其中所述关节电机组包括:髋关节第一电机,髋关节第二电机,髋部第二安装座,膝部安装座,膝关节电机,所述髋部第二安装座横向侧与髋关节第二电机的定子连接、纵向侧与髋关节第一电机的转子连接,所述膝关节电机的定子经膝部安装座与髋关节第二电机的转子连接,所述大腿连杆及大腿辅助连杆的第一端分别与膝关节电机的定子连接,所述驱动连杆与膝关节电机的转子连接。
9、在可能的优选实施方式中,其中所述关节电机组还包括:减震器,其包括:安装环,支撑件,弹簧,其中所述弹簧经支撑件固定在安装环一侧,所述安装环与大腿连杆的第一端连接,所述关节电机组带动曲柄四连杆机构做屈膝趴卧动作至约极限时,弹簧与小腿连杆相抵。
10、为了实现上述目的,根据本发明的第二个方面,还提供了一种轮足式机器人,其包括:上述中任一所述的仿生轮足腿部结构构成的轮足腿,及机架,其中所述机架用于安装所述轮足腿。
11、在可能的优选实施方式中,其中所述轮足腿为四条,包括两条前腿、两条后腿,其中前腿与后腿结构相同呈前肘后膝式布置。
12、通过本发明提供的该仿生轮足腿部结构及轮足式机器人,巧妙的仅通过六个机械部件(小腿连杆,直线驱动器,小腿底座,腕关节件,第一、第二旋转关节件)来实现腕关节的仿生结构,从而模拟出生物的尺骨桡骨的内旋、外旋作用,以支持轮足旋转角度范围从-60度至+60度,由此极大的提升了轮足腿部结构的灵活性。
13、另一方面,该种仿生轮足腿部结构的设计,使得可以使用直线驱动器来模拟旋前肌与旋后肌的作用,从而相比于需要复杂的控制算法的现有方案,本方案可以通过直接控制直线驱动器伸缩,来实现和建立与腕关节件的左右旋转摆动的控制关系,操作更加便捷,有利于实现机器人更加精准的运动控制,并且由于该结构上无需使用电机,因此相比现有技术,也提升了轮足腿部结构的微型化、轻量化程度,并进一步降低了实施成本。
14、此外将该仿生轮足腿部结构应用在多足轮足式机器人上时,可实现轮式运动的转向功能,有利于避免采用差速行驶时产生的摩擦作用,提高轮足部分的使用寿命及可靠性。
技术特征:
1.一种仿生轮足腿部结构,其包括:小腿连杆,直线驱动器,足端单元,其中所述足端单元包括:轮子,驱动电机,腕关节件,小腿底座,其中驱动电机固定在腕关节件第一侧,驱动电机传动端与轮子连接,所述小腿底座与腕关节件转轴连接,所述腕关节件第二侧向外延伸出舵杆,其中所述小腿连杆第一端向外延伸出支架,所述直线驱动器第一端经第一旋转关节件与小腿连杆支架铰接、第二端经第二旋转关节件与舵杆铰接,所述小腿连杆第二端与小腿底座连接。
2.根据权利要求1所述的仿生轮足腿部结构,其中所述腕关节件上设有第一轴孔,且第一轴孔内设有键槽,所述小腿底座上设有第二轴孔,所述小腿底座与腕关节件之间通过防松轴插入第一、第二轴孔内形成转轴连接,其中所述防松轴上设有平键,以与腕关节件第一轴孔内的键槽配接,固定防松轴轴向位置,所述小腿底座第二轴孔顶部盖设有角度传感器,其感测区朝向防松轴的顶部。
3.根据权利要求2所述的仿生轮足腿部结构,其中所述腕关节件的第一轴孔处、或小腿底座的第二轴孔处中任一处设有轴承槽,以容纳推力轴承,所述腕关节件与小腿底座经防松轴穿过推力轴承,插入第一、第二轴孔内形成转轴连接。
4.根据权利要求1所述的仿生轮足腿部结构,其中所述第一旋转关节件包括:第一关节,第二关节,其中所述第一关节呈类z形,其第一侧设有第一纵向轴叉,第二侧固定在支架上,所述第二关节呈类u形叉状,其内凹一侧设有纵向轴孔,靠近叉头处设有横向轴孔,所述第二关节经纵向轴孔与第一关节的第一纵向轴叉转轴连接,所述第二关节的叉头处经横向轴孔与直线驱动器第一端转轴连接,以在直线驱动器与小腿连杆之间建立两个自由度的铰接。
5.根据权利要求1所述的仿生轮足腿部结构,其中所述第二旋转关节件包括:第三关节,第四关节,其中所述第三关节呈类u形叉状,其内凹一侧设有纵向轴孔,靠近叉头处设有横向轴孔,所述第四关节两端分别设有第二纵向轴叉、第三纵向轴叉,且第二纵向轴叉与第三纵向轴叉之间呈倾斜状,所述第四关节件经第二纵向轴叉与第三关节纵向轴孔转轴连接,所述第四关节件经第三纵向轴叉与舵杆转轴连接,所述第三关节经叉头处的横向轴孔与直线驱动器第二端转轴连接,以在直线驱动器与舵杆之间建立三个自由度的铰接。
6.根据权利要求1所述的仿生轮足腿部结构,其中还包括:关节电机组,曲柄四连杆机构,其中所述曲柄四连杆机构包括:大腿连杆,大腿辅助连杆,驱动连杆,膝关节连杆,所述大腿连杆及大腿辅助连杆的第一端分别与关节电机组的末端电机定子连接,所述驱动连杆与关节电机组的末端电机转子连接,所述膝关节连杆的第一端与驱动连杆的曲柄转轴连接,所述大腿连杆、大腿辅助连杆、膝关节连杆的第二端分别与小腿连杆的第三端对应位置处转轴连接。
7.根据权利要求6所述的仿生轮足腿部结构,其中所述关节电机组包括:髋关节第一电机,髋关节第二电机,髋部第二安装座,膝部安装座,膝关节电机,所述髋部第二安装座横向侧与髋关节第二电机的定子连接、纵向侧与髋关节第一电机的转子连接,所述膝关节电机的定子经膝部安装座与髋关节第二电机的转子连接,所述大腿连杆及大腿辅助连杆的第一端分别与膝关节电机的定子连接,所述驱动连杆与膝关节电机的转子连接。
8.根据权利要求7所述的仿生轮足腿部结构,其中所述关节电机组还包括:减震器,其包括:安装环,支撑件,弹簧,其中所述弹簧经支撑件固定在安装环一侧,所述安装环与大腿连杆的第一端连接,所述关节电机组带动曲柄四连杆机构做屈膝趴卧动作至约极限时,弹簧与小腿连杆相抵。
9.一种轮足式机器人,其包括:权利要求1-8中任意一项所述的仿生轮足腿部结构构成的轮足腿,及机架,其中所述机架用于安装所述轮足腿。
10.根据权利要求9所述的轮足式机器人,其中所述轮足腿为四条,包括两条前腿、两条后腿,其中前腿与后腿结构相同呈前肘后膝式布置。
技术总结
本发明提供了一种仿生轮足腿部结构及轮足式机器人,其中该仿生轮足腿部结构包括:小腿连杆,直线驱动器,足端单元,其中所述足端单元包括:轮子,驱动电机,腕关节件,小腿底座,其中驱动电机固定在腕关节件第一侧,驱动电机传动端与轮子连接,所述小腿底座与腕关节件转轴连接,所述腕关节件第二侧向外延伸出舵杆,其中所述小腿连杆第一端向外延伸出支架,所述直线驱动器第一端经第一旋转关节件与小腿连杆支架铰接、第二端经第二旋转关节件与舵杆铰接,所述小腿连杆第二端与小腿底座连接。籍此以通过仿桡尺骨旋转腕关节的设计来实现轮足的旋转摆动,以提升轮足腿部结构的灵活性。
技术研发人员:商慧亮,张安政,张晨昀,李睿蛟
受保护的技术使用者:复旦大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!